
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Работа, совершаемая внешними силами при вращательном движении относительно неподвижной осиСтр 1 из 2Следующая ⇒
Из (7.1) следует, что при α < π/2, dA > 0 - работа положительная; α = π/2, dA = 0 - работа не совершается; α > π/2, dA < 0 - работа отрицательная; α = 0, dA = F×dr - направление перемещения и направление действующей силы совпадают. В том случае, когда величина тангенциальной составляющей силы остаётся всё время неизменной, то работа определяется соотношением
В частности, это условие выполняется, если тело движется прямолинейно, и постоянная по величине сила
Вектор силы на плоскости всегда можно разложить на две составляющие - нормальную и тангенциальную. Ясно, что только тангенциальная составляющая силы способна совершить работу. В случае, когда величина проекции силы на направление перемещения не остается постоянной во времени, для вычисления работы следует разбить путь S на элементарные участки
А работа на всем пути S может быть вычислена как сумма элементарных работ:
В общем случае, когда материальная точка (тело, система), двигаясь по криволинейной траектории, проходит путь конечной длины, можно мысленно разбить этот путь на бесконечно малые элементы, на каждом из которых сила F может считаться постоянной, а элементарная работа может быть вычислена по формуле (5.1). Сложив все эти элементарные работы и перейти к пределу, устремив к нулю длины всех элементарных перемещений, а их число – к бесконечности, получим
Выражение (5.6) называют криволинейным интегралом вектора F вдоль траектории L.
Работу, определяемую формулой (5.6), можно изобразить графически, в координатах F - S, площадью фигуры, что соответствует нахождению криволинейного интеграла. На рис. 5.1 построен график Ft как функции положения точки на траектории. Из рисунка видно, что элементарная работа
Найдем работу, совершаемую при растяжении пружины, подчиняющемуся закону Гука. Сила, растягивающая пружину, равна по величине и противоположна по направлению упругой силе, т.е.
где Сила действует в направлении перемещения, поэтому
Элементарная работа в данном случае может быть представлена в виде
По формуле (5.6) найдем полную работу:
При сжатии пружины на величину Экспериментально установлено, что работа сил тяжести, упругих сил, электрических сил не зависит от формы траектории, а определяется начальным и конечным положениями материальной точки (системы, тела). Работа этих сил по замкнутой траектории равна нулю:
Силы, для которых выполняется данное условие, называются консервативными или потенциальными. Работа консервативных сил на любом замкнутом пути равна нулю. Поэтому потенциальное поле сил можно определить как поле таких сил, работа которых на любом замкнутом пути равна нулю. Поскольку работа в потенциальном поле сил на замкнутом пути равна нулю, то на одних участках замкнутого пути силы совершают положительную работу, а на других – отрицательную. Все силы, не удовлетворяющие этому условию, называются неконсервативными. Поскольку dA = F∙dS×cosa = (F ∙d S) = Fs×dS, (5.18) то N = d(F∙dS×cosa)/dt = d(F ∙d S)/dt = d(Fs×dS)/dt = F×v, (5.19) где F - мгновенная сила; v - мгновенная скорость. Таким образом, мгновенная мощность равна произведению мгновенной силы на мгновенную скорость. Формула (5.19) справедлива, когда сила F или скорость v постоянны. В этом случае N представляет собой постоянную мощность. При равномерно ускоренном движении (F = const)
Nmax = F×vmax; <N> = F<v>. (5.20) При вращательном движении формулу для мгновенной мощности можно получить следующим образом: так как
то при ω2 = ω, ω1 = 0
Мгновенная мощность равна произведению мгновенного момента силы на мгновенную угловую скорость. Выражение (5.22) справедливо также и в том случае, когда M и w остаются постоянными, тогда мощность тоже постоянна. Если в формулу (5.22) подставить M = F∙r и w = v/r, то после сокращения получим N = Fv, (5.23) что совпадает с ранее полученной формулой (5.19). Для поступательного движения полученные соотношения можно использовать в том случае, когда Fi - тангенциальная сила, действующая на периферии тела, а v - скорость движения точки на периферии тела. В системе СИ мощность измеряется в ваттах (Вт). 5.4. Энергия как универсальная мера различных форм движений и взаимодействий В общем случае энергия выражает количественную меру и качественную характеристику движения и взаимодействия материи во всех ее превращениях. Понятие энергии связывает воедино все явления природы. В соответствии с различными формами движения материи рассматривают различные формы энергии: механическую, внутреннюю, электромагнитную, химическую, ядерную. Это деление до определенной степени условно. Так, химическая энергия складывается из кинетической энергии движения электронов и энергии взаимодействия электронов друг с другом и с атомными ядрами. Разность энергий (изменение энергии), присущих системе в каких-либо состояниях, равна работе, совершаемой системой при переходе из одного состояния в другое: DW = W1 – W2 = A. (5.24) Механической энергией, соответствующей данной форме движения материи, называется величина, равная работе, которая может быть произведена при полном превращении движения данной формы в механическую форму движения материи. Под механической энергией системы подразумевают сумму кинетической и потенциальной энергий. 5.5. Кинетическая энергия системы и её связь с работой внешних и внутренних сил, приложенных к системе При действии на движущееся тело постоянной по величине и совпадающей по направлению с направлением движения силы, тело либо приобретает определенный запас энергии, либо совершает работу. Физическая величина, характеризующая способность движущегося тела или системы совершать работу при торможении до полной остановки, называется кинетической энергией. Кинетическая энергия - энергия, которой обладает движущееся тело. Кинетическая энергия системы равна сумме кинетических энергий отдельных тел (материальных точек) этой системы: Wk = åWki, (5.25) где Wki - кинетическая энергия i-го тела системы. Изменение кинетической энергии системы при ее переходе из одного состояния в другое происходит под действием приложенных к системе внешних и внутренних сил и равно сумме работ этих сил: DWk = Wk2 – Wk1 = åAiвнут + åAiвн. (5.26) Уравнение (5.26) выражает теорему об изменении кинетической энергии, с помощью которой решаются многие задачи динамики. Изменение кинетической энергии системы равно сумме изменений кинетических энергий отдельных тел (материальных точек) системы:
Для вывода формулы кинетической энергии системы необходимо рассчитать работу, которая может быть совершена системой при ее торможении до полной остановки. Предположим, что система (твердое тело) состоит из n тел (материальных точек). При поступательном движении твердого тела со скоростью v каждая его материальная точка (элемент тела) движется с такой же скоростью. Элементарная работа сил трения при торможении, действующих на i-ю материальную точку, равна элементарному изменению кинетической энергии этой точки:
Изменение кинетической энергии материальной точки тела при переходе из одного состояния в другое имеет следующий вид:
Так как материальная точка и состояние тела были выбраны произвольно, то кинетическая энергия i-й материальной точки до начала торможения была следующей:
Это справедливо и в том случае, когда тело перемещается из точки
(5.31) Кинетическая энергия тела массой m равна сумме кинетических энергий отдельных материальных точек (частей) этого тела. В рассматриваемом случае
где m = åmi - масса тела (системы). Таким образом, кинетическая энергия системы (тела) является функцией состояния ее движения. Так как p = mv, то
Соотношение (7.33) устанавливает связь между кинетической энергией тела (системы) и его импульсом. При скоростях, близких к скорости распространения света в вакууме, кинетическая энергия материальной точки
с - скорость распространения света в вакууме; m× c2 = E0 - энергия покоя материальной точки. При малых скоростях (v<<c) соотношение (5.34) переходит в формулу (5.30). Так как dWk = dA, то при: 1) dA > 0 - работа совершается над системой – dWk > 0 - кинетическая энергия системы возрастает; 2) dA < 0 - работа совершается системой – dWk < 0 - кинетическая энергия системы убывает; 3) dA = 0 - если система не совершает работу или работа не совершается над системой – dWk = 0 - кинетическая энергия системы не изменяется. 5.6. Энергия системы, совершающей вращательное движение При вращательном движении твердого тела любая ее элементарная массаDmi имеет свою собственную линейную скорость vi, но одну и ту же угловую скорость, которая равна угловой скорости w тела. Кинетическая энергия такой элементарной массы
где vi = ωri. Подставив значение vi в (5.35) будем иметь
где Ii = Dmiri2 - момент инерции материальной точки относительно выбранной оси вращения. Кинетическая энергия тела равна сумме кинетических энергий отдельных материальных точек:
где Таким образом, кинетическая энергия тела, совершающего вращательное движение относительно неподвижной оси вращения, прямо пропорциональна квадрату угловой скорости тела и его моменту инерции. Так как M = I×e = I×(dw/dt), а j = w×dt, следовательно,
То есть работа внешних сил, действующих на вращающуюся относительно неподвижной оси материальную точку (тело, систему), равна изменению кинетической энергии:
5.7. Потенциальная энергия и энергия взаимодействия. Потенциальная энергия и устойчивость системы Потенциальная энергия - физическая величина, характеризующая способность системы совершать работу, связанную с изменением конфигурации и взаимного расположения тел или частей в системе. Физический смысл имеет только понятие потенциальная энергия системы. Изменение конфигурации системы, взаимного расположения тел или частей одного и того же тела возможно при переходе системы из одного состояния в другое. При этом происходит изменение потенциальной энергии, которое не зависит: а) от начального значения потенциальной энергии; б) промежуточных состояний системы; в) пути перехода системы из состояния в состояние. Изменение потенциальной энергии системы зависит только от начального и конечного ее состояний и равно работе внутренних (консервативных) сил системы, взятой с обратным знаком dWp = - dA. (5.40) За счет изменения энергии dWp совершается элементарная работа. Знание потенциальной энергии играет большую роль при определении условий устойчивости тел. Так как модулю dA = dWp = F×dx×cosa и при a = 0 dWp = F×dx, то
Известно, что в положении равновесия действующая на тело сила F = 0. Таким образом,
Это означает, что в положении равновесия потенциальная энергия Wp либо минимальна, либо максимальна. Возникающая при отклонении от положения равновесия сила направлена к положению равновесия, а, следовательно, при удалении от положения равновесия эта сила совершает отрицательную работу; потенциальная энергия тела (системы) при этом возрастает. Это означает, что в положении равновесия потенциальная энергия системы минимальна. Таким образом, признаками устойчивого равновесия (положения) являются
то есть минимум потенциальной энергии. Потенциальная энергия является более общей характеристикой воздействия тел или частиц друг на друга, приводящей к изменению состояния их движения. Потенциал поля тяготения
т.е. потенциал поля тяготения тоже с увеличением расстояния увеличивается и при r®¥ равен нулю. Так как одна и та же точка поля тяготения одновременно характеризуется напряженностью и потенциалом, то между ними должна существовать связь, вытекающая из понятий напряженности и потенциала. Очевидно, что
В общем случае связь между напряженностью и потенциалом поля тяготения выражается соотношением g = - gradj. (5.61) Знак “ – “означает, что напряженность поля тяготения направлена в сторону уменьшения потенциала и обусловливает все трудности запуска космических аппаратов с поверхности Земли. Он показывает, что тело находится в энергетическом плену у Земли. Чтобы оно покинуло её, необходимо совершить работу, равную изменению потенциальной энергии системы “тело-Земля”. Говорят, например, что тело находится в «потенциальной яме», глубина которой равна Wp. Чтобы покинуть эту «потенциальную яму», тело должно преодолеть потенциальный барьер, высотa которого равна глубине «потенциальной ямы». Из (7.1) следует, что при α < π/2, dA > 0 - работа положительная; α = π/2, dA = 0 - работа не совершается; α > π/2, dA < 0 - работа отрицательная; α = 0, dA = F×dr - направление перемещения и направление действующей силы совпадают. В том случае, когда величина тангенциальной составляющей силы остаётся всё время неизменной, то работа определяется соотношением
В частности, это условие выполняется, если тело движется прямолинейно, и постоянная по величине сила
Вектор силы на плоскости всегда можно разложить на две составляющие - нормальную и тангенциальную. Ясно, что только тангенциальная составляющая силы способна совершить работу. В случае, когда величина проекции силы на направление перемещения не остается постоянной во времени, для вычисления работы следует разбить путь S на элементарные участки
А работа на всем пути S может быть вычислена как сумма элементарных работ:
В общем случае, когда материальная точка (тело, система), двигаясь по криволинейной траектории, проходит путь конечной длины, можно мысленно разбить этот путь на бесконечно малые элементы, на каждом из которых сила F может считаться постоянной, а элементарная работа может быть вычислена по формуле (5.1). Сложив все эти элементарные работы и перейти к пределу, устремив к нулю длины всех элементарных перемещений, а их число – к бесконечности, получим
Выражение (5.6) называют криволинейным интегралом вектора F вдоль траектории L.
Работу, определяемую формулой (5.6), можно изобразить графически, в координатах F - S, площадью фигуры, что соответствует нахождению криволинейного интеграла. На рис. 5.1 построен график Ft как функции положения точки на траектории. Из рисунка видно, что элементарная работа Найдем работу, совершаемую при растяжении пружины, подчиняющемуся закону Гука. Сила, растягивающая пружину, равна по величине и противоположна по направлению упругой силе, т.е.
где Сила действует в направлении перемещения, поэтому
Элементарная работа в данном случае может быть представлена в виде
По формуле (5.6) найдем полную работу:
При сжатии пружины на величину Экспериментально установлено, что работа сил тяжести, упругих сил, электрических сил не зависит от формы траектории, а определяется начальным и конечным положениями материальной точки (системы, тела). Работа этих сил по замкнутой траектории равна нулю:
Силы, для которых выполняется данное условие, называются консервативными или потенциальными. Работа консервативных сил на любом замкнутом пути равна нулю. Поэтому потенциальное поле сил можно определить как поле таких сил, работа которых на любом замкнутом пути равна нулю. Поскольку работа в потенциальном поле сил на замкнутом пути равна нулю, то на одних участках замкнутого пути силы совершают положительную работу, а на других – отрицательную. Все силы, не удовлетворяющие этому условию, называются неконсервативными. Работа, совершаемая внешними силами при вращательном движении относительно неподвижной оси При вращательном движении системы вокруг неподвижной оси работу совершают внешние силы, действующие на систему. Каждая элементарная массаDmi в этом случае совершает вращательное движение в плоскости, перпендикулярной оси вращения. Траектория движения элементарной массы представляет собой окружность с центром на оси вращения. Работа силы F i по перемещению элементарной массы на элементарном пути d S i будет равна
где dSi = ridj; ri - радиус соответствующей окружности. Так как
Работа внешних сил, действующих на тело (систему) за время dt, будет вычислена так
Если проекция результирующего момента M на выбранное направление постоянна, то
5.3. Мощность Для оценки эффективности машин и механизмов важно знать, как быстро они совершают данную работу. Физическая величина, численно равная работе, совершаемой в единицу времени, называется мощностью. Таким образом, мощность характеризует работоспособность машин и механизмов.
|
|||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 100; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.16.254 (0.075 с.) |
 . (5.2)
. (5.2) образует с направлением движения постоянный угол
образует с направлением движения постоянный угол  . Поэтому выражению (5.2) в данном случае можно придать следующий вид:
. Поэтому выражению (5.2) в данном случае можно придать следующий вид: . (5.3)
. (5.3) , взяв их столь малыми, что за время прохождения телом такого участка можно было бы считать силу постоянной. Тогда на каждом элементарном участке пути DS1работа силы равна
, взяв их столь малыми, что за время прохождения телом такого участка можно было бы считать силу постоянной. Тогда на каждом элементарном участке пути DS1работа силы равна . (5.4)
. (5.4) . (5.5)
. (5.5) . (5.6)
. (5.6)
 численно равна площади заштрихованной полоски, а работа
численно равна площади заштрихованной полоски, а работа  на пути от точки 1 до точки 2 численно равна площади фигуры, ограниченной кривой Ft(S), вертикальными прямыми 1 и 2 и осью OS.
на пути от точки 1 до точки 2 численно равна площади фигуры, ограниченной кривой Ft(S), вертикальными прямыми 1 и 2 и осью OS. , (5.7)
, (5.7) – удлинение пружины.
– удлинение пружины. . (5.8)
. (5.8) . (5.9)
. (5.9) . (5.10)
. (5.10)
 . (5.11)
. (5.11) ., (5.21)
., (5.21) ,
, . (5.22)
. (5.22) ;
;  . (5.27)
. (5.27) .(5.28)
.(5.28) .
.  . (5.29)
. (5.29)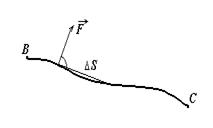
 . (5.30)
. (5.30) в точку
в точку  (рис.5.2). При этом совершается работа
(рис.5.2). При этом совершается работа  .
. , (5.32)
, (5.32) . (5.33)
. (5.33) , (5.34)
, (5.34) , (5.35)
, (5.35) , (5.36)
, (5.36) , (5.37)
, (5.37) - момент инерции тела относительно той же оси вращения.
- момент инерции тела относительно той же оси вращения. . (5.38)
. (5.38) . (5.39)
. (5.39) . (5.41)
. (5.41) . (5.42)
. (5.42) ;
;  > 0, (5.43)
> 0, (5.43) , (5.59)
, (5.59) . (5.60)
. (5.60) , (5.12)
, (5.12) - численное значение момента силы
- численное значение момента силы  , а dj = w∙dt, то
, а dj = w∙dt, то . (5.13)
. (5.13) . (5.14)
. (5.14) . (5.15)
. (5.15)


