Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основные технические характеристикиСодержание книги
Поиск на нашем сайте
Рабочий агент – сжатый очищенный воздух или природный газ давлением 1.0 ÷ 9.0 МПа; Температура окружающей среды – от минус 55ºС до +50ºС; Относительная влажность при Т = 35ºС – до 98 %; Напряжение управленияпостоянного тока – 24В или 110В; Режим работы электромагнитов – длительный; Вид исполнения – взрывозащищённое исполнение со взрывобезопасным уровнем.
Устройство ЭПУУ-4.
Узел управления состоит из следующих основных частей:
На Рис.3. изображён упрощённый вид сбоку ЭПУУ-4, а упрощённый вид сзади изображён на Рис.4.
Рис.3. Упрощённый вид сбоку ЭПУУ-4: 1- корпус, 2 – передняя крышка, 3 – металлический стакан, 4 – электромагнит, 5 – верхняя крышка, 6 – клеммник, 7 – штуцер, 8 – плита, 9 – пневмоклапан, 10 – шток пневмоклапана, 11 – рычаг пневмоклапана, 12 – толкатель электромагнита, 13 – катушка электромагнита, 14 – якорь.
Рис.4. Упрощённый вид сзади ЭПУУ-4: 1 – плита, 2 – входной штуцер, 3 – кабельный ввод, 4 – верхняя крышка, 5 – штуцер сброса.
Принцип работы.
Для ручного управления узлом предусмотрен рычаг управления 11 пневмоклапаном 9 (Рис.3).Давление воздуха (газа) питания подаётся к входному штуцеру 2 (Рис.4).При нажатии на один из рычагов управления пневмоклапанов (КО – клапан открытия, КМ – клапан смазки, КЗ – клапан закрытия) усилие передастся через шток 10 на пневмоклапан 9, что вызовет его срабатывание и подачу рабочего агента на один из выходных штуцеров. При отпускании рычага управления происходит отключение пневмоклапана и сброс рабочего агента через сбросной штуцер в атмосферу. Дистанционное управление узлом осуществляется одним из электромагнитов (ЭО – электромагнит открытия, ЭМ – электромагнит смазки, ЭЗ – электромагнит закрытия) при подаче на них сигналов управления (Рис.5).
Рис.5. Электропневматическая схема ЭПУУ-4.
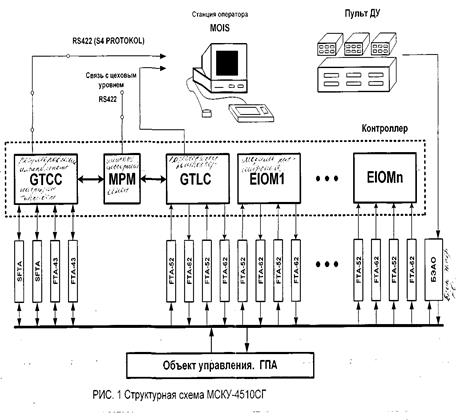
4. Структурная схема МСКУ-4510-СГ и принцип её работы. Структурная схема комплекса управления ГПА, с применением программно-технических средств "Series-4", приведена на рис. Конструктивно нес элементы системы размещены в приборном контейнере, который устанавливается в непосредственной близости к агрегату. Приборный контейнер оснащен системой искусственного микроклимата, которая обеспечивает заданные условия эксплуатации установленного в нем оборудования, тем самым повышается надежность работы системы. Внутри приборного контейнера устанавливается унифицированный каркас шасси, для размещения на нем логических модулей кон'1 роллера. На внутренних стенках приборного контейнера размещены модули связи с объектом (РТА), аналоговые и дискретные преобразователи, блоки реле и автоматы безопасности. Аналоговые и дискретные преобразователи устанавливаются непосредственно на устройстве связи с объектом. Устройства связи с объектом соединяются с задней панелью контроллера с помощью стандартных кабелей. Станция контроля и управления ГПА располагается в помещении операторной компрессорной станции, представляет собой персональный компьютер IBM PC, работающий под управлением WINDOWS. Оператор осуществляет управление и контроле ГПА через активные динамические экраны монитора. Обмен информацией между станцией контроля и управления с логическим контроллером осуществляется по последовательным каналам типа RS422/RS485. Такая организация обмена информации исключает прокладку физических линий связи между ГПА и аппаратной, тем самым уменьшаются расходы на кабельную продукцию и монтажные работы. Контроллер системы управления ГПА состоит из следующих логических модулей: программно-аппаратный модуль логического управления ГПА (GTLC); программно-аппаратный модуль регулирования (GTCC); модули расширения входов (EIOM); модуль межпроцессорного обмена (МРМ). Программно-аппаратный модуль логического управления (GTLC) предназначен для выполнения задач логического управления ГПА. В энергонезависимую область памяти модуля логического управления загружаются программы, составленные на языке релейной логики, и реализующие алгоритмы управления ГПА.
Программно-аппаратный модуль регулирования ГПА (GTCC) в зависимости от загружаемого в него пакета прикладных программ выполняет три специализированных приложений (функциональных модулей): модуль управления расходом топлива (GT); модуль антипомпажного регулирования (AS); модуль распределения нагрузки между ГПА (PC). Модуль GTCC является самостоятельным звеном в процессе регулирования агрегатом и осуществляет регулирование частоты вращения силовой турбины в соответствии с заданием, получаемым от оператора или заданием, получаемым от регулятора распределения нагрузки и осуществляет автоматическое регулирование. Функции антипомпажного регулирования и зашиты нагнетателя основана на поддержании расстояния между рабочее точкой нагнетателя и линией помпажа не менее заранее заданною и автоматически изменяющегося в зависимости от скорости приближения рабочей точки к линии помпажа. Линия границы помпажа вычисляется опытным путем в результате проведения помпажных тестов. Предотвращение помпажа нагнетателя осуществляется путем воздействия регулятора на антипомпажный клапан, установленного в линии перепуска i аза. а также вносится корректировка частоты вращения силовой турбины Модули логического управления и регулирования по своим конструктивным особенностям имеют ограниченное число входных и выходных каналов, что для управления и регулирования ГПА недостаточно, поэтому в контроллере устанавливаются модули расширения сигналов ввода-вывода ГЛОМ. Для взаимосвязи работы всех модулей в контроллере предусмотрен коммуникационный модуль межпроцессорного обмена МРМ. который обеспечивает взаимодействие и обмен информацией между всеми модулями, установленными в контроллере, а также обеспечивает связь САУиР с более высоким уровнем управления. Для приема сигналов от датчиков температуры, давления, вибрации используются аналоговые преобразователи фирмы "Analog Devices". Они предназначены для преобразования (Нормализации) сигналов от первичных преобразователей в унифицированный сигнал 1-5V. пропорциональный значению контролируемого параметра. Ввод-вывод дискретных сигналов осуществляется с использованием дискретных преобразователей фирмы "Grayhill". Дискретные преобразователи осуществляют прием, нормализацию, гальваническое разделение, усиление и формирование сигналов управления исполнительными механизмами. На случай сбоев в работе контроллера или отказа в работе в системе управления предусмотрен блок аварийного останова (|БЭАО). БЭАО предназначен для аварийного останова ГПА по команде оператора от кнопки экстренного аварийного останова (ЭАО), размещенной на пульте управления. БЭАО используют при отказе САУ и Р агрегата, связанным с потерей функций управления. Включая автоматическую защиту. Блок экстренного аварийного останова осуществляет закрытие стопорного клапана, включение маслонасосов, перестановку топливных и основных кранов в состояние, соответствующие аварийному останову. 5. Техника безопасности при работе на заточных и сверлильных станках.
|
|||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 980; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.79.214 (0.007 с.) |