Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Формализация алгоритма работы устройстваСодержание книги
Поиск на нашем сайте
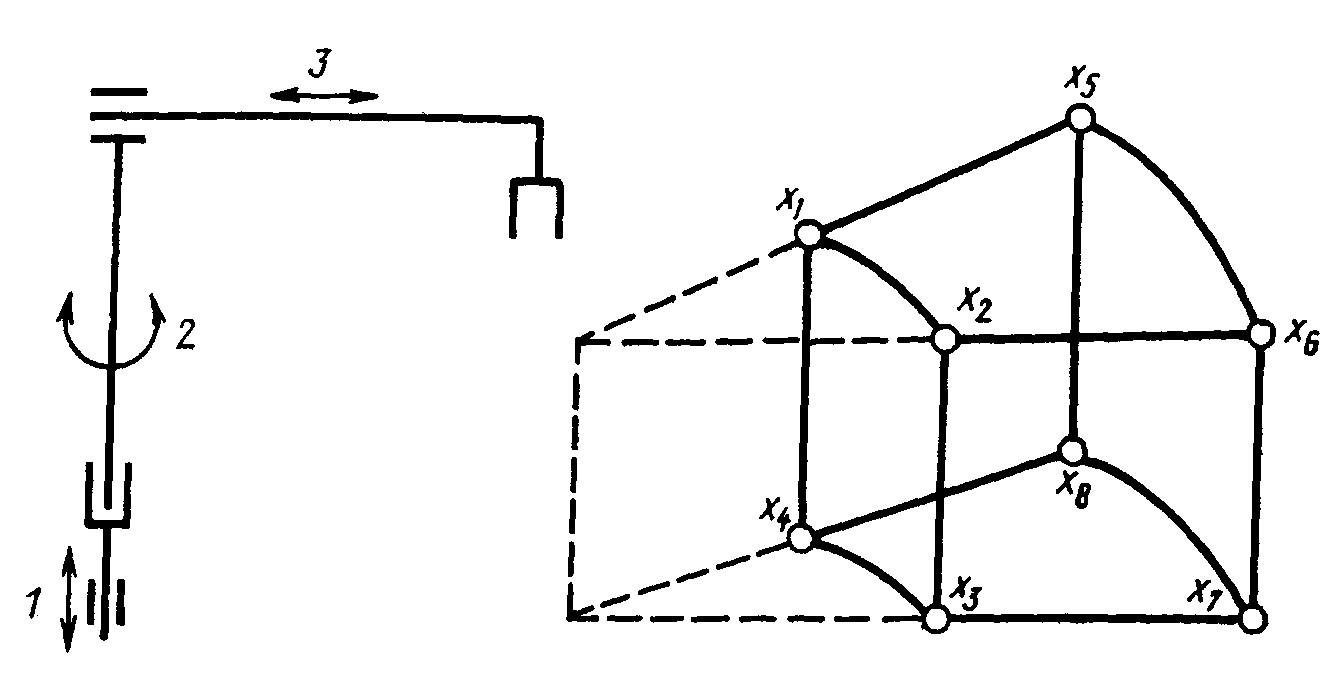
Работа устройства описана в задании словесным алгоритмом, который необходимо формализовать. Формализация алгоритма работы последовательностного устройства может быть реализована в виде графа переходов. Использование известных методик, а также моделирующих программ, позволит сравнительно просто перейти от графа к принципиальной схеме управления устройством по заданному алгоритму в автоматическом режиме. Наладочный режим можно реализовать включением его в алгоритм или аппаратно, логически объединив автоматические и наладочные сигналы. Пример: Управление цикловым манипулятором Его спецификой является то, что он может находиться в конечном числе состояний. Рассмотрим схему манипулятора с тремя степенями подвижности (рис. 6.1).
а б Рис. 6.1. Кинематическая схема (а) и область достижимости (б) трехстепенного циклового манипулятора
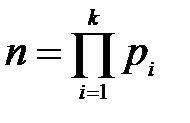
Каждая степень подвижности имеет по две точки позиционирования. Область достижимости - конечное множество, состоящее из восьми точек x 1... x 8. Если число степеней подвижности k, число точек p i, то общему числу точек, куда может попасть схват, соответствует запись
В данном случае мы имеем шесть различимых между собой сигналов y ij (по два с каждой степени подвижности) с датчиков положения (нахождения) подвижного сочленения i - номер степени подвижности i = 1, 2, 3 j - номер датчика j = 1, 2.
Робототехнический комплекс (ртк) сборки узла из двух деталей может включать два манипулятора, систему технического зрения (СТЗ) в режиме визуальной инспекции, поворотный стол и пресс (рис. 6.2). Технологический процесс работы РТК заключается в выполнении следующих операций:
Рис. 6.2. Состав адаптивного сборочного робототехнического комплекса
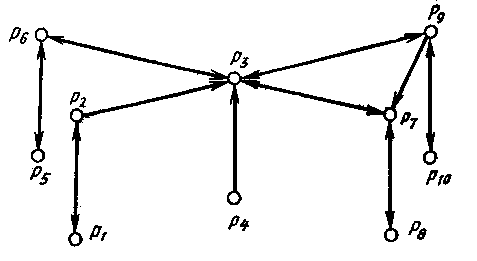
Шаг 1. Взять деталь А и перенести на сборочную позицию. Шаг 2. Убедиться с помощью СТЗ в наличии на сборочной позиции детали в требуемом положении, Если нет - перейти на шаг 11. Шаг 3. Взять деталь Б из накопителя и перенести на сборочную позицию. Шаг 4. Убедиться с помощью СТЗ в наличии детали Б на сборочной позиции в требуемом положении. Если нет - шаг 13. Шаг 5. Повернуть стол. Шаг 6. Запрессовать детали А и Б. Шаг 7. Повернуть стол. Шаг 8. Убедиться с помощью СТЗ в правильности сборки. Если нет, то перейти на шаг 15. Шаг 9. Перенести узел в тару готовых изделий. Шаг 10.Перейти на шаг 1. Шаг 11.Взять деталь А и положить в тару брака. Шаг 12.Перейти на шаг 1. Шаг 13.Взять детали Б и А и положить в тару брака. Шаг 14.Перейти на шаг 1. Шаг 15.Взять узел и положить в тару брака. Шаг 16.Перейти на шаг 1. Наличие системы очувствления в виде СТЗ придает РТК адаптивные свойства, которые заключаются в смене линии поведения в зависимости от состояния процесса сборки, который СТЗ контролирует. Приведенная последовательность содержит лишь основные операции. В реальном случае могут появиться дополнительные устройства (ориентирующие устройства и т.п.), а значит, и шаги. Работу РТК можно представить следующим словесным (вербальным) алгоритмом: Разработать схему автоматического управления приводами подъема и поворота руки манипулятора А1 (рис.6.2) таким образом, чтобы после стартового сигнала манипулятор выполнил шаг 1, т.е. "взять деталь А и перенести на сборочную позицию". При поступлении сигнала " Z " включается электродвигатель вертикального движения М1. При этом рука робота из исходного положения Р2 (рис.2), контролируемого датчиком положения К2, опускается в положение Р1, контролируемое конечным выключателем К1. Привод захвата М3 обеспечивает зажим детали. Для контроля срабатывания захвата необходим датчик C 1, сигнализирующий о том, что в захвате зажата деталь. Включается реверс электродвигателя М1 и рука манипулятора поднимается вместе с деталью. Затем включается электродвигатель М2. При этом рука робота из положения Р2 поворачивается в положение Р3, контролируемое К4. Срабатывает привод М1 до появления сигнала К1. Привод захвата М3 освобождает деталь (сигнал C 2). Включается реверс электродвигателя М1 и рука манипулятора поднимается в положение Р3, поворачивается в исходное положение Р2 до следующего стартового сигнала. В случае брака сборки этот же манипулятор по сигналу B выполняет шаг 15 "взять узел и положить в тару брака". При поступлении сигнала " F " включается электродвигатель М2. При этом рука робота из положения Р2, контролируемого датчиком положения К3, поворачивается в положение Р3, контролируемое К4. Срабатывает привод вертикального движения М1 до появления сигнала К1. Привод захвата М3 обеспечивает зажим бракованного узла (датчик S 1). Включается реверс электродвигателя М1 и рука манипулятора поднимается вместе с бракованным узлом. Затем включается реверс электродвигателя М2. При этом рука манипулятора из положения Р3, контролируемого датчиком положения К4, поворачивается в положение Р6, контролируемое К6. Срабатывает привод М1, захват опускается в положение Р5до появления сигнала К1. Привод захвата М3 освобождает деталь (сигнал S 2). Включается реверс электродвигателя М1 и рука манипулятора поднимается в положение Р6 (сигнал К2), включается реверс электродвигателя М2, рука манипулятора поворачивается в исходное положение Р2 до следующего стартового сигнала. Подъем и поворот руки манипулятора обеспечиваются двумя независимыми приводами М1 и М2, которые при реверсивном включении осуществляют ее опускание и поворот в обратном направлении. Отдельный привод захвата М3 реализует его функцию. Каждое из состояний схемы обеспечивает включение одного или нескольких приводов до момента появления существенного для данного состояния сигнала. Сигналы генерируются датчиками (конечными выключателями), расположенными на рабочих органах манипулятора. На них воздействуют упоры при достижении рабочими органами манипулятора заданных положений. На схеме (рис. 6.3) показана область достижимости, где линиями обозначены возможные состояния (движения) манипулятора, а точками - моменты появления сигналов, вызывающих переход схемы из одного состояния - в другое. Графическое изображение структуры и схемы движений рабочих органов проектируемого устройства облегчает формализацию его работы.
Рис. 6.3. Пример изображения структуры движений рабочих органов
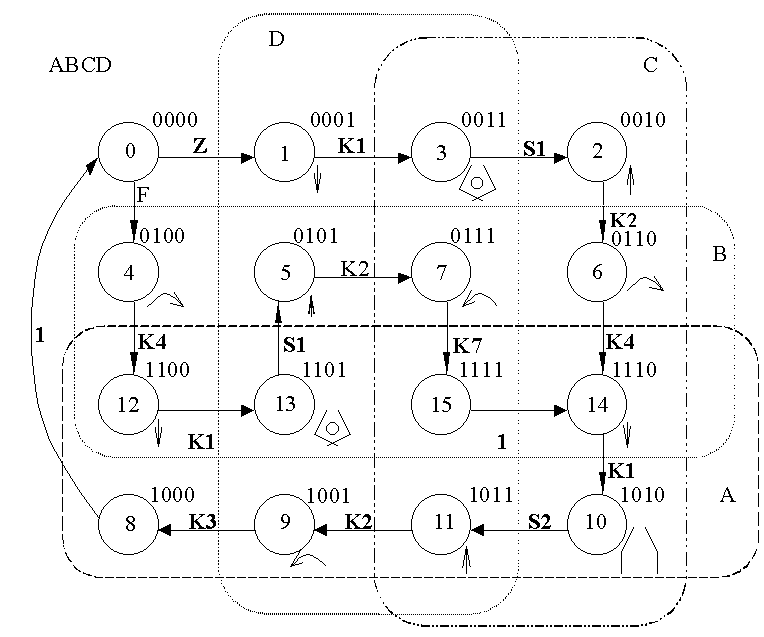
Построение графа переходов Задача составления графа переходов многозначна, один из вариантов графа представлен на рис. 6.4. Вершины графа соответствуют состояниям схемы. Номера соответствуют их двоичному коду. В исходном состоянии все исполнительные устройства выключены, вторичные переменные равны 0 (0000). При поступлении сигнала "Z" происходит переход системы в следующее состояние (0001), в котором обеспечивается включение электродвигателя М1. Захват опускается. Сигнал К1 переводит схему в состояние (0011), в котором обеспечивается срабатывание захвата. Сигнал S 1 переключает схему в состояние (0010). Электродвигатель М1 поднимает захват. При появлении сигнала К2 система переходит из состояния (0010) в состояние (0110), в котором электродвигатель М2 работает вперед. Рука манипулятора вместе с захватом поворачивается по часовой стрелке (если смотреть сверху). При появлении сигнала К4 система переходит в состояние (1110). В этом состоянии обеспечивается включение электродвигателя М1. Захват опускается. Сигнал К1 переводит схему в состояние (1010), в котором захват разжимается, о чем сигнализирует сигнал S 2.
Рис. 6.4. Граф переходов манипулятора
Схема переходит в состояние (1011), рука поднимается, и в момент появления сигнала датчика К2 схема переходит в состояние (1001), включается реверс двигателя поворота М2 и рука возвращается в исходное положение, о чем сигнализирует датчик К3, который переводит схему в состояние (1000). Это состояние является пустым и переход из него в исходное состояние схемы осуществляется подачей единичного сигнала "1". При поступлении сигнала "Z" происходит переход системы в следующее состояние (0001), в котором обеспечивается включение электродвигателя М1. Захват опускается. Сигнал К1 переводит схему в состояние (0011), в котором обеспечивается срабатывание захвата. Сигнал S 1 переключает схему в состояние (0010). Электродвигатель М1 поднимает захват. При появлении сигнала К2 система переходит из состояния (0010) в состояние (0110), в котором электродвигатель М2 работает вперед. Рука манипулятора вместе с захватом поворачивается по часовой стрелке (если смотреть сверху). При появлении сигнала К4 система переходит в состояние (1110). В этом состоянии обеспечивается включение электродвигателя М1. Захват снова опускается. Сигнал К1 переводит схему в состояние (1010), в котором захват разжимается, о чем сигнализирует сигнал S 2. Схема переходит в состояние (1011), рука поднимается, и в момент появления сигнала датчика К2 схема переходит в состояние (1001), включается реверс двигателя поворота М2 и рука возвращается в исходное положение, о чем сигнализирует датчик К3, который переводит схему в состояние (1000). Это состояние является пустым и переход из него в исходное состояние схемы осуществляется подачей единичного сигнала "1". Если на графе остаются незадействованные состояния, то возможно случайное попадание системы в эти состояния. Для исключения "зависания" схемы необходимо предусмотреть независимый переход из этих состояний в исходное состояние (0000). Обеспечивается это сигналами независимого перехода "1".
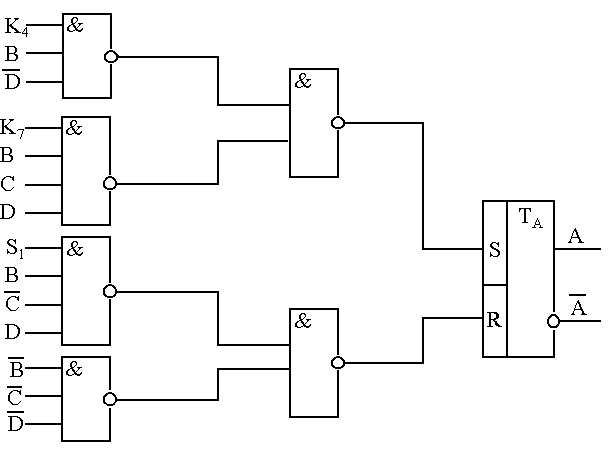
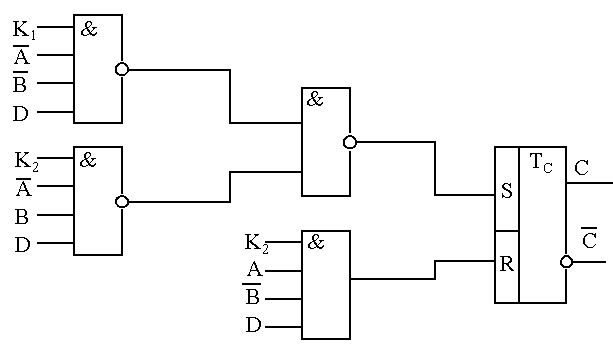
Синтез схемы управления Выделим области для каждого из трех необходимых в данном случае триггеров А, В, С и D. В каждой из областей значение какой-либо вторичной переменной должно оставаться неизменным (для области D - это единица в нулевом разряде, для области C - это единица в первом разряде, для области B - во втором и для области А - это единица в третьем разряде). Приняв во внимание все входные и выходные сигналы для каждой из областей, составляем логические выражения для сигналов установки и сброса каждого триггера. Рассмотрим область, в которой вторичная переменная А = 1. Сигнал К4 дважды входит в эту область, т.е. является сигналом установки триггера А. Ему соответствуют сочетания вторичных переменных Сигнал К7 также входит в эту область, т.е. является сигналом установки триггера А. Ему соответствует сочетание вторичных переменных BCD. Сигналы S 1 и 1 выходят из области А = 1, т.е. являются сигналами сброса. Им соответствуют сочетания вторичных переменных
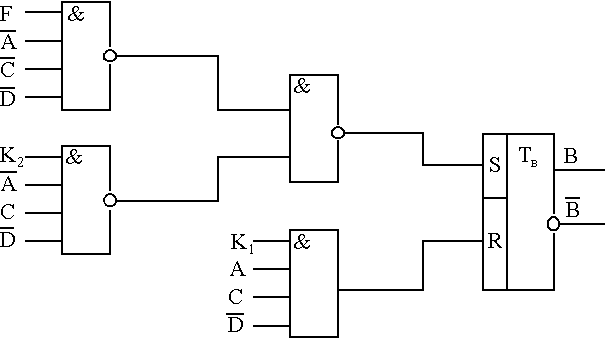
Схема реализации этих выражений представлена на рис. 6.5. Рассмотрим область, в которой вторичная переменная В = 1. Сигналы F и К2 входят в эту область, т.е. является сигналами установки триггера В. Им соответствуют сочетания вторичных переменных
Рис. 6.5.Схема для триггера А Сигнал К1 выходит из области В = 1, т.е. является сигналом сброса триггера В. Ему соответствует сочетание вторичных переменных
Схема реализации этих выражений представлена на рис.6.6. Рассмотрим область, в которой вторичная переменная С = 1. Сигналы К1 и К2 входят в эту область, т.е. являются сигналами установки триггера С. Им соответствуют сочетания вторичных переменных Сигнал К2 выходит из этой области, т.е. является сигналом сброса триггера С. Ему соответствует сочетание вторичных переменных
Рис. 6.6.Cхема для триггера В
Схема реализации этих выражений представлена на рис. 6.7.
Рис. 6.7. Схема для триггера С
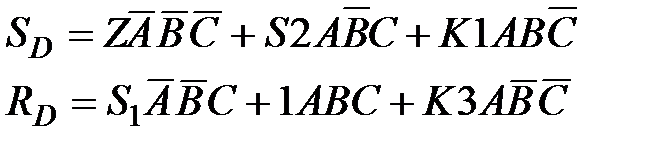
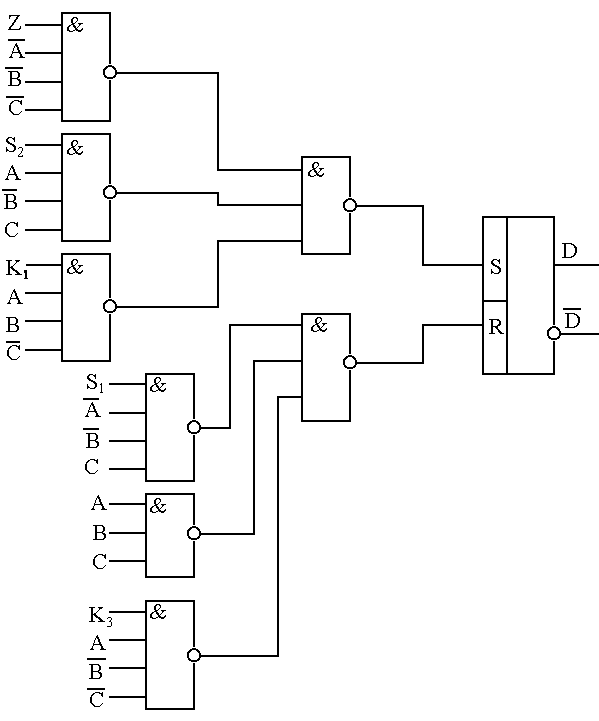
Рассмотрим область, в которой вторичная переменная D = 1. Сигналы Z, S 2 и К1 входят в эту область, т.е. являются сигналами установки триггера D. Им соответствуют сочетания переменных Сигналы S 1, 1 и К3 выходят из этой области, т.е. являются сигналами сброса триггера D. Им соответствуют сочетания вторичных переменных
Схема реализации этих выражений представлена на рис. 6.8. Синтез схемы генерации выходных функций производится в соответствии с картой Карно.
Рис. 6.8.Cхема для триггера D
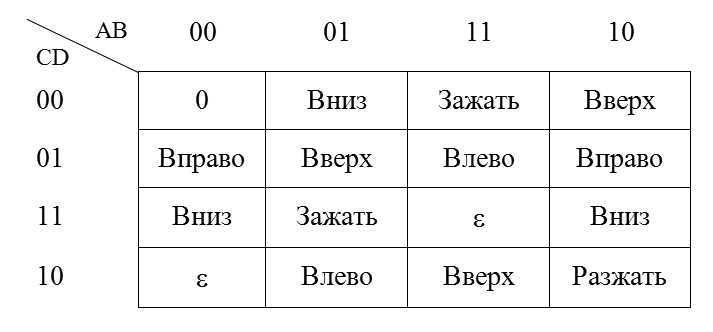
Карта Карно для выходных функций
Далее выходы триггеров соединяются согласно карте Карно для выходных функций. Схемы с большим числом состояний громоздки, поэтому из практических соображений (размещение элементов, разводка, конструирование, отладка) приемлемое число состояний - восемь. Если число состояний больше восьми, то используется прием организации вспомогательных схем, каждая из которых должна иметь не более 8 состояний. Каждое состояние основной схемы - восемь состояний вспомогательной схемы. Из восьми состояний исходной схемы можно построить граф на 64 состояния - это дает возможность реализовать достаточно сложную схему. Каждая вспомогательная схема проста для реализации и отладки. Статистически определено при каскадном соединении число состояний для исходных схем 2...4; для вспомогательных 6...8. Это наиболее эффективно с точки зрения объема конструкции.
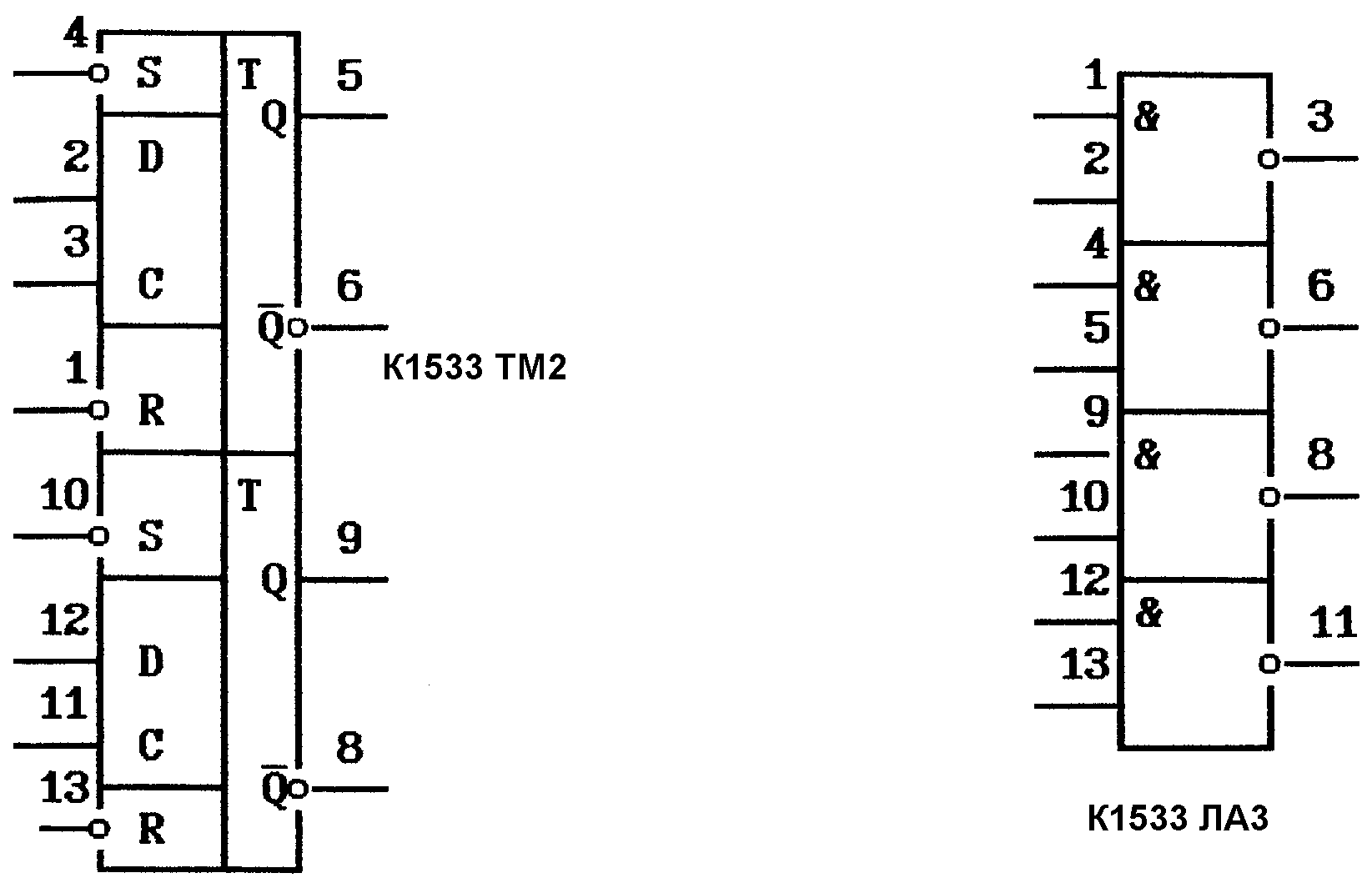
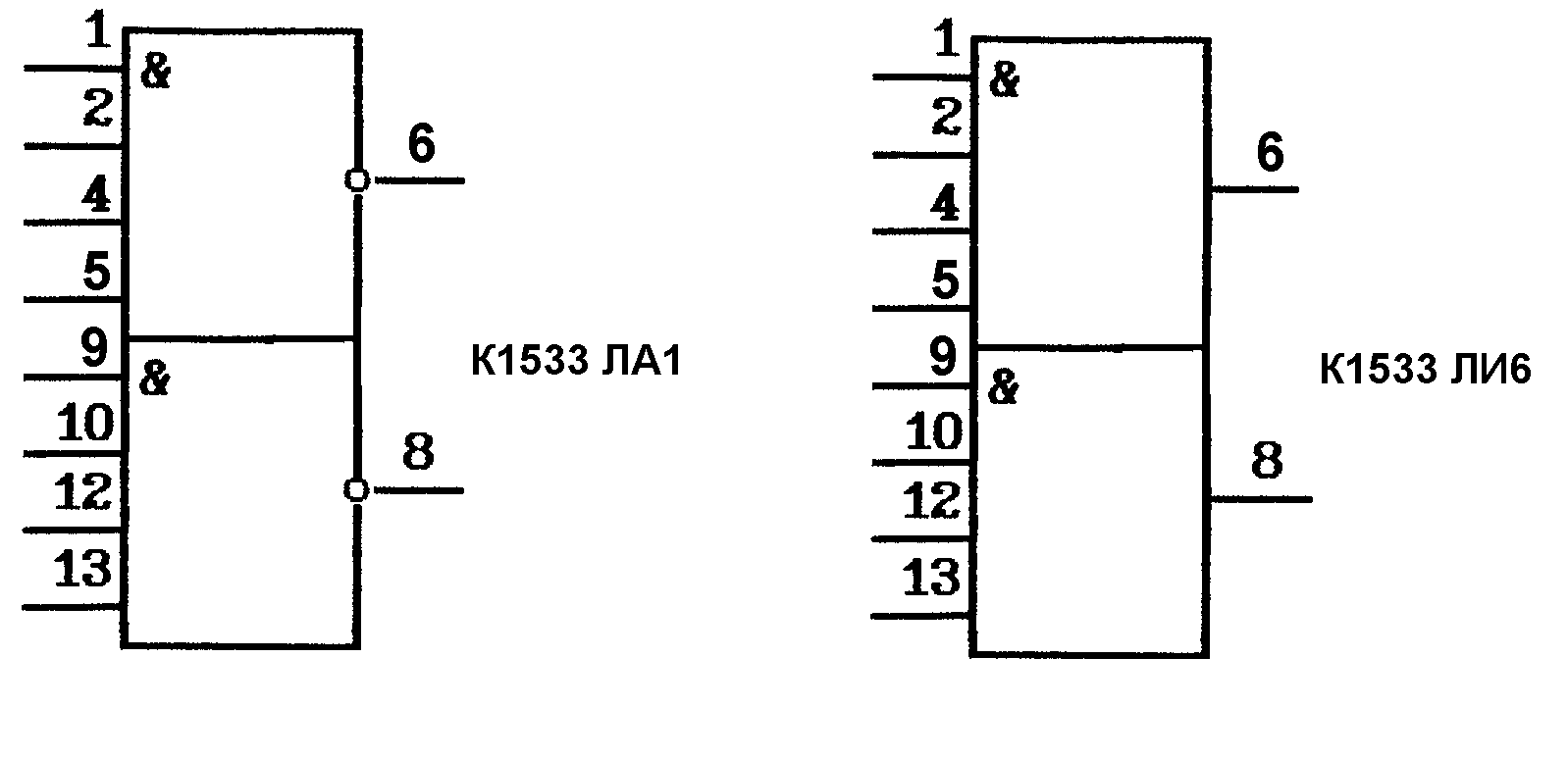
Выбор элементной базы После разработки логической схемы появляется возможность выбора элементной базы электронного устройства (ЭУ). В первую очередь, необходимо решить, какие функциональные части ЭУ могут быть построены на интегральных микросхемах (ИМС), а какие на дискретных электрорадиоэлементах (ЭРЭ). Если какая-либо функциональная часть или все ЭУ могут быть построены на ИМС, то нужно выбирать именно их ввиду значительных преимуществ, связанных с разработкой, производством и эксплуатацией микроэлектронной аппаратуры. Практически любое ЭУ, построенное на ИМС, имеет некоторое количество дискретных ЭРЭ. На дискретных элементах создают ЭУ, которые не могут быть построены на ИМС по следующим двум основным причинам: значения некоторых электрических параметров не могут быть получены с применением ИМС; промышленность не выпускает ИМС данного функционального назначения. Для реализации вторичной переменной А выбираем из серии 1533 микросхемы К1533 ТМ2, К1533 ЛА1 и К1533 ЛА3. Так как триггеры в микросхеме К1533 ТМ2 на входах S и R имеют активный низкий уровень, то необходимо инвертировать выражения Rа и Sа. Для реализации вторичных переменных В, С, и D используем аналогичные микросхемы (рис. 6.9-6.12). При реализации вторичных переменных В и С понадобится четырехвходовой элемент "И" - К1533 ЛИ6.
Рис. 6.9. Рис. 6.10.
Рис. 6.11. Рис. 6.12.
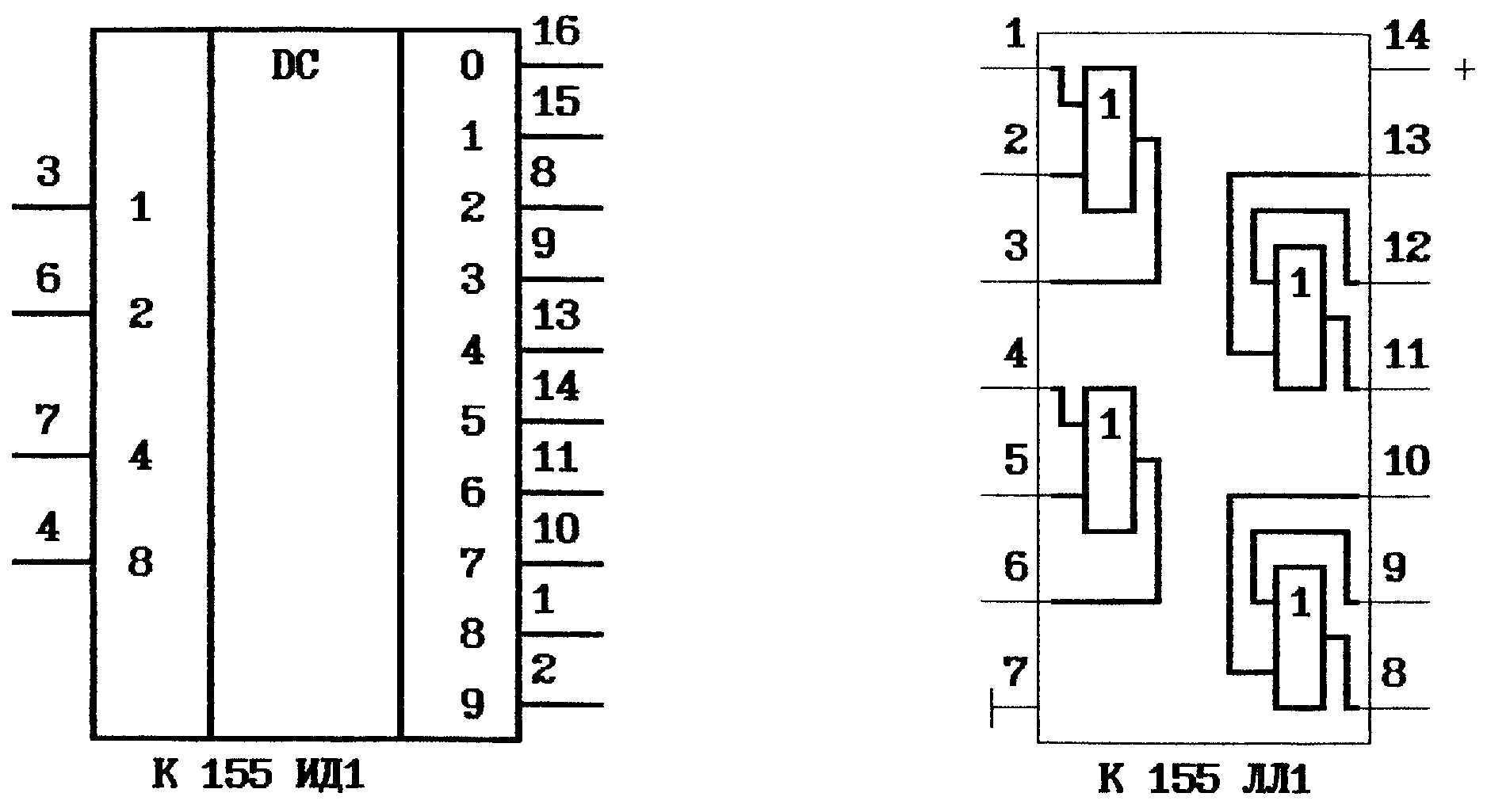
Схемную реализацию таблицы истинности для выходных функций можно легко осуществить, использовав дешифратор К 155 ИД1 (рис.6.13), переводящий двоичный код в десятичный. Из таблицы истинности видно, что сигнал "М1 вниз" должен быть при двух комбинациях (0100) и (0011), сигнал "М2 вправо" при комбинациях (0001) и (1001) и т.д. Для реализации этих выходных функций используем микросхему К 1533 ЛИ6 (рис. 6.14).
Рис. 6.13. Рис.6.14.
|
||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 103; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.22.217.176 (0.008 с.) |

 (6.1)
(6.1)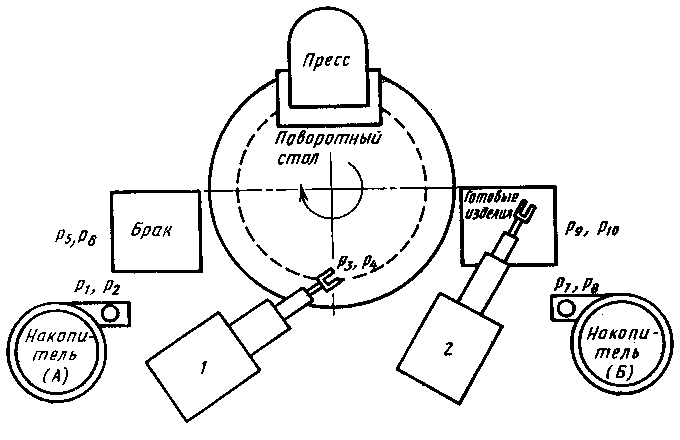
 .
. . Таким образом, логические выражения для установки и сброса триггера А будут иметь вид:
. Таким образом, логические выражения для установки и сброса триггера А будут иметь вид:
 .
.
 . Логические выражения для установки и сброса триггера В:
. Логические выражения для установки и сброса триггера В: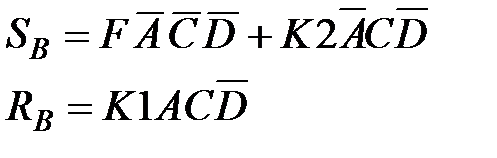
 .
. . Логические выражения для установки и сброса триггера С:
. Логические выражения для установки и сброса триггера С: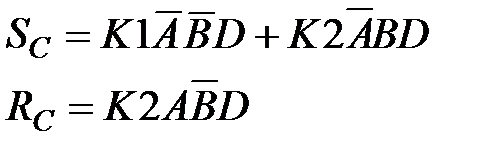
 .
. . Логические выражения для установки и сброса триггера D:
. Логические выражения для установки и сброса триггера D: