Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчёт регулировочной характеристикиСодержание книги Поиск на нашем сайте
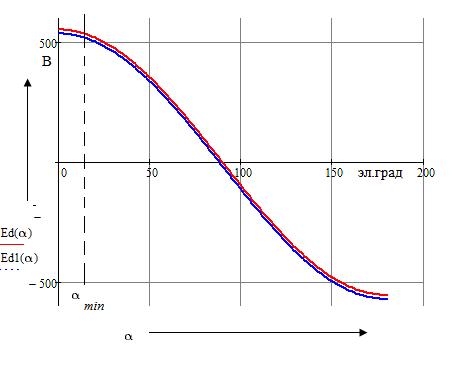
Регулировочную характеристику Ed = f (α) для тиристорного преобразователя в зоне непрерывного тока строим на основании соотношения: Е d = Edo ∙ cos α, Е d = 552,9 ∙ cos α. Регулировочная характеристика представлена на рисунке 3.1. При известной характеристике Ed = f (α) необходимо построить график выпрямленного напряжения на якоре двигателя при номинальном токе нагрузки (I н = Id н) в функции изменения α пo соотношению: U яд = Edo ∙ cos α – I я ∙ R в n, где R в n – сопротивление цепи выпрямленного тока, за исключением сопротивления якорной цепи электродвигателя. Сопротивление цепи выпрямленного тока, Ом: R в n = n ∙ R тр + Rk + Ry, где R тр – активное сопротивление обмоток трансформатора, приведенное к цепи выпрямленного тока, Ом; Rk – коммутационное сопротивление, Ом; Ry – сопротивление уравнительного реактора, Ом. Активное сопротивление обмоток трансформатора определяется соотношением, Ом:
Определяем коммутационное сопротивление, Ом: Rk = где р –число пульсаций; хтр – приведённое к вторичной цепи индуктивное сопротивление фазы преобразовательного трансформатора. Приведённое к вторичной цепи индуктивное сопротивление фазы трансформатора: хтр = ω ∙ L тр , хтр = 314,2∙7,75∙10-5=0,024. Rk = Сопротивление уравнительного реактора определяется соотношением: Ry ≈ (0,1 – 0,2) Здесь сопротивление
где
Сопротивление щеточного контакта определяется соотношением, Ом:
где ∆ U = 2 – падение напряжения, В.
Сопротивление уравнительного реактора, Ом: Ry = 0,1∙ Ry = 0,1∙ 0,057 = 5,7∙10-3. Сопротивление цепи выпрямленного тока, Ом: R в n = 5,7∙10-3 + 0,023 +5,7∙10-3 = 0,034.
U яд = 552,9 ∙ cos α – 490∙0,034, U яд = 552,9 ∙ cos α – 16,7.
График выпрямленного напряжения на якоре двигателя представлен в одних координатах с регулировочной характеристикой на рисунке 3.1.
Рисунок 3.1 – Регулировочные характеристики
Электромеханическую характеристику ω = f(Iя) строим по выражению:
где R Σ – суммарное сопротивление цепи выпрямленного тока, Ом; Се – конструктивный коэффициент двигателя; Ф – поток возбуждения двигателя. Суммарное сопротивление цепи выпрямленного тока, Ом: R Σ = R Σ = 0,057 + 5,7∙10-3 = 0,063. Значение произведения конструктивного коэффициента и потока возбуждения двигателя, Вб:
где ωн – значение номинальной угловой скорости, рад/с. Номинальная угловая скорость двигателя, рад/с:
где nн – номинальная скорость вращения, об/мин.
Для построения характеристики необходимо определить значения углов регулирования α при Iя = Idн, соответствующих заданным значениям скорости двигателя: ± ωн; ±0,75 ωн; ±0,5 ωн; ±0,25 ωн; ωн = 0. Расчет углов регулирования α произведем по формуле, выведенной из выражения (3.1):
Таблица 3.1 – Расчет углов регулирования
Электромеханические характеристики представлены на рисунке 3.2.
Рисунок 3.2 – Электромеханические характеристики двигателя
|
||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-08; просмотров: 248; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.197.93 (0.009 с.) |

 ,
, где
где  – потери короткого замыкания, Вт:
– потери короткого замыкания, Вт:
 .
. .
. .
. =
=  ,
, – сопротивление якорной цепи двигателя, Ом;
– сопротивление якорной цепи двигателя, Ом; – сопротивление щеточного контакта, Ом.
– сопротивление щеточного контакта, Ом. ,
, .
. .
. Тогда уравнение выпрямленного напряжения на якоре двигателя будет иметь вид, В:
Тогда уравнение выпрямленного напряжения на якоре двигателя будет иметь вид, В:
 3.2 Расчет электромеханической характеристики системы ТП-Д
3.2 Расчет электромеханической характеристики системы ТП-Д , (3.1)
, (3.1)


 ,
,
 Расчет углов регулирования α сведен в таблицу 3.1.
Расчет углов регулирования α сведен в таблицу 3.1.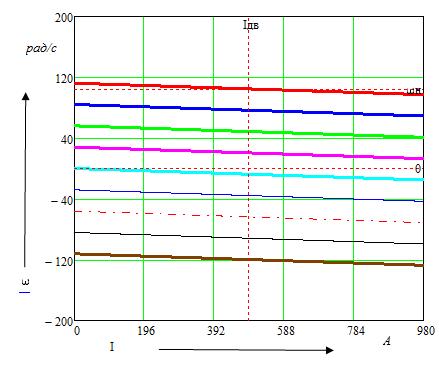 и
и