Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Устройство и принцип работы датчиков. ⇐ ПредыдущаяСтр 2 из 2
По назначению в САУ датчики можно разделить на датчики: пути и положения рабочих органов, скоростные, силовые, углового положения или угла рассогласования, размерные, тепловые, и т. д.
Датчики пути и положения рабочих органов.
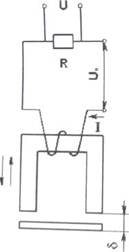
Индуктивные датчики. Принцип их действия основан на изменении индуктивности катушки с подвижным якорем вследствие изменения магнитной проницаемости. Индуктивные датчики, как электроконтактные, можно использовать как датчики пути или положения и как размерные. Если перемещать якорь 1 датчика, воздушный зазор δ будет изменяется, что вызовет изменение индуктивности обмотки ω>Д. Сила тока в цепи обмотки датчика:
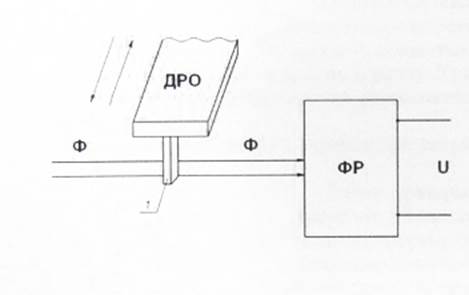
Фотоэлектрические датчики. Фотоэлектрические датчики представляют собой обычное фотореле установленное на рабочий орган (ДРО), переместившись в установленное положение, экраном перекрывает поток света Ф, вызывая срабатывание фотореле (ФР). В промышленности применяют также размерные фотоэлектрические датчики. Фотоэлектрический размерный датчик состоит из диска, который соединен с ДРО. На диске нанесены штрихи или прорези с определённым шагом t. При движении рабочего органа штрихи на диске перекрывают световой поток Ф, вызывая срабатывание фотореле. Изменение перемещение ∆ L = nt, где n — число срабатывания фотореле; t — цена деления шага. Имеются датчики, которых в качестве измерительных шкал применяют линейки с нанесенными штрихами.
Датчики углового положения. Датчики углового положения создают управляющий сигнал в зависимости от углового положения или угла рассогласования между рабочими органами.
Потенциометрический датчик состоит из потенциометров П1 и П2, которые подключены параллельно к общему источнику питания U п. Подвижные контакты потенциометров К1 и К2 соответственно соединены механически с задающим (ЗРО) и исполнительным (ИРО) рабочими органами. Напряжение, снимаемое с подвижных контактов потенциометров, является напряжением сигнала Uc. При согласованном положении рабочих органов (подвижные контакты находятся в одинаковом положении), когда α≠β, напряжение сигнала равно нулю. При рассогласованном положении, когда α≠β, сигнал датчика на выходе не равен нулю, т.е. Uc ≠ 0. Причем сигнал будет пропорционален углу рассогласования т. е. Uc = α – β, а знак сигнала Определяет направление рассогласования (Uc ≠ 0 означает, что Uc > 0 или Uc <0 т. е. сигнал соответственно положительный или отрицательный). Сельсины. Сельсины представляют собой трансформаторы с воздушным зазором, у которых при вращении ротора происходит плавное изменение величины ЭДС, наведённое в обмотке ротора. Обычно сельсины работают в паре: сельсин, связанный с ведомым валом, называют сельсином-приемником, а сельсин, связанный с ведущим валом, - сельсином-датчиком. Однофазная обмотка сельсина расположена на статоре, а трёхфазная — на роторе. Трехфазная обмотка состоит из трех катушек, сдвинутых относительно друг друга на 120°. Они уложены в пазы ротора и соединены в звезду. Концы фазовых (C1, C2, СЗ) обмоток выведены на три контактных кольца, расположенных на валу ротора.
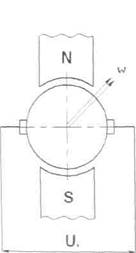
Датчики скорости. Датчики скорости создают управлявшие сигналы в зависимости от скорости. Тахогенераторы.
Тахогенераторы служат для изменения частоты вращения. В зависимости от рода тока различают тахогенераторы постоянного и переменного тока. Тахогенераторы постоянного тока разделяют по способу возбуждения на тахогенераторы с возбуждением от постоянных магнитов и с электромагнитным возбуждением. Те и другие представляют малогабаритную машину постоянного тока. Напряжение на зажимах якоря пропорционально частоте вращения вала якоря, т. е. E = U я = кеФω, где Е - ЭДС, индуцируемая в обмотке якоря; Ф - поток возбуждения; ке - конструктивный коэффициент машины. По принципу действия тахогенераторы переменного тока делят на синхронные и асинхронные. Конструкция асинхронного тахогенератора подобна конструкции двухфазного асинхронного двигателя. Тахогенератор имеет две обмотки: обмотку возбуждения(ОВ) и выходную обмотку. При вращении ротора в выходной обмотки наводится ЭДС, пропорциональная частоте вращения.
Силовые датчики. Силовые датчики обеспечивают создание управляющих сигналов в зависимости от сил, создаваемых в рабочих органах. Пьезометрические датчики. Пьезометрические датчики для измерения сил представляют собой кварцевую пластину 1. С двух сторон на неё напылены или приклеены токопроводящим клеем электроды 2, с которых снимается выходное напряжение. Два электрода и кварцевый диэлектрик образуют конденсатор, на электродах которого присутствуют электрические заряды, возникающие вследствие прямого пьезоэлектрического эффекта при сжатии кварцевой пластины силой Р.
Электрический заряд пропорционален сжимающей силе P:Q=αP, где α - коэффициент пропорциональности, называемый пьезомодулем. Под действием изменяющейся силы Р на электродах датчика появляется выходное напряжение
где Сд - емкость датчика; См - монтажная ёмкость. Выходное напряжение датчиков изменяется от единиц милливольт до единиц вольт. Вывод по работе: В ходе работы изучил конструкции, устройство и принцип работы датчиков; сняли и построили статистические характеристики и определили рабочую зону. Компетенции:
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-08; просмотров: 346; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.129.23.30 (0.007 с.) |

 Потенциометрический датчик.
Потенциометрический датчик.