Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Ивановский государственный химико-технологическийСтр 1 из 3Следующая ⇒
ИВАНОВСКИЙ ГОСУДАРСТВЕННЫЙ ХИМИКО-ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ Факультет Техники, управления и цифровой инфраструктуры Кафедра Технической кибернетики и автоматики Направление 27.03.04 Управление в технических системах Профиль Системы и средства автоматизации технологических процессов и производств УТВЕРЖДАЮ: Зав. кафедрой __________ В.А. Зайцев «02» ноября 2020 г. З А Д А Н И Е на курсовую работу студенту Фамилия Имя Отчество курс/группа 4/37 (Ф.И.О. полностью) 1. Тема Компьютерное моделирование системы управления технологическим объектом 2. Исходные данные 1). Материалы лабораторных работ. 2). Литературные данные.
3. Содержание проекта (работы) 1). Характеристика технологического процесса как объекта автоматизации и управления. 2). Обзор подходов и методов к синтезу САР. 3). Разработка функциональной схемы системы автоматизации. 4). Структурный, алгоритмический и параметрический синтез комбинированной САР. 4. Вопросы для специальной разработки 1). Разработка программы моделирования системы управления. 2). Компьютерное моделирование системы управления. Исследование инвариантности, ковариантности и робастности комбинированной САР. 5. Руководитель работы доц., к.т.н. Невиницын В.Ю.
(должность, Ф.И.О.) 6. Дата выдачи задания 02.11.2020 7. Дата предоставления законченной работы 21.12.2020 Руководитель Невиницын В.Ю. (Ф.И.О., подпись) Студент ФИО (Ф.И.О., подпись) Содержание Введение. 4 1. Характеристика технологического процесса как объекта автоматизации и управления. 5 1.1 Описание технологического процесса. 5 1.2 Режимно-технологические и конструктивные параметры процесса. 6 1.3 Математическое описание аппарата. 6 1.4 Программные средства моделирования объекта. 8 1.5. Исследование статических и динамических характеристик объекта. 9 1.6 Выводы.. 14 2. Структурные схемы систем управления. Принципы управления. 15 3. Разработка упрощенной схемы автоматизации. 17 4. Синтез комбинированной системы управления. 18 4.1 Структурный синтез системы управления. 18 4.2 Алгоритмический синтез системы управления. 18 4.3 Параметрический синтез системы управления. 19 5. Моделирование системы управления. 22 5.1 Разработка программы моделирования системы управления. 22 5.2 Исследование инвариантности к возмущающим факторам. 23 5.2 Исследование ковариантности с задающими воздействиями. 25 5.3 Анализ результатов моделирования. 27 Заключение. 28
Введение Целью производства является получение готового продукта путем переработки сырья, выбрав для этого более эффективный способ. Для того чтобы этот способ функционировал должным образом необходимо проводить контроль состояния и сформировать подобающее управляющее воздействие при отклонении технологических параметров от нормального значения. Эту задачу решает автоматизированная система управления технологическим процессом. Первым этапом разработки автоматизированной системы управления технологическим процессом является разработка системы автоматического управления технологическим процессом, которая предполагает построение аналитическим или экспериментальным путем, математической модели объекта. На втором этапе анализируются статические и динамические свойства и характеристики объекта. Таким образом, для разработки автоматизированной системы управления необходима математическая модель технологического процесса. Для того чтобы достичь поставленной цели, будет необходимо решить ряд задач: 1. Провести анализ емкостного аппарата как объекта управления и автоматизации: разработать концептуальную модель ТП, разработать математическую модель для условий статики и динамики, провести оценку результатов и выбрать регулирующие воздействия; 2. Выполнить структурно-алгоритмический и параметрический синтез системы управления: построить функциональную схему автоматизации, на основе её построить структурную модель, выбрать закон регулирования, рассчитать настройки регуляторов; 3. Выполнить моделирование системы управления: разработать программные средства, исследовать систему на свойства инвариантности и ковариантности.
Исходные данные Таблица 1
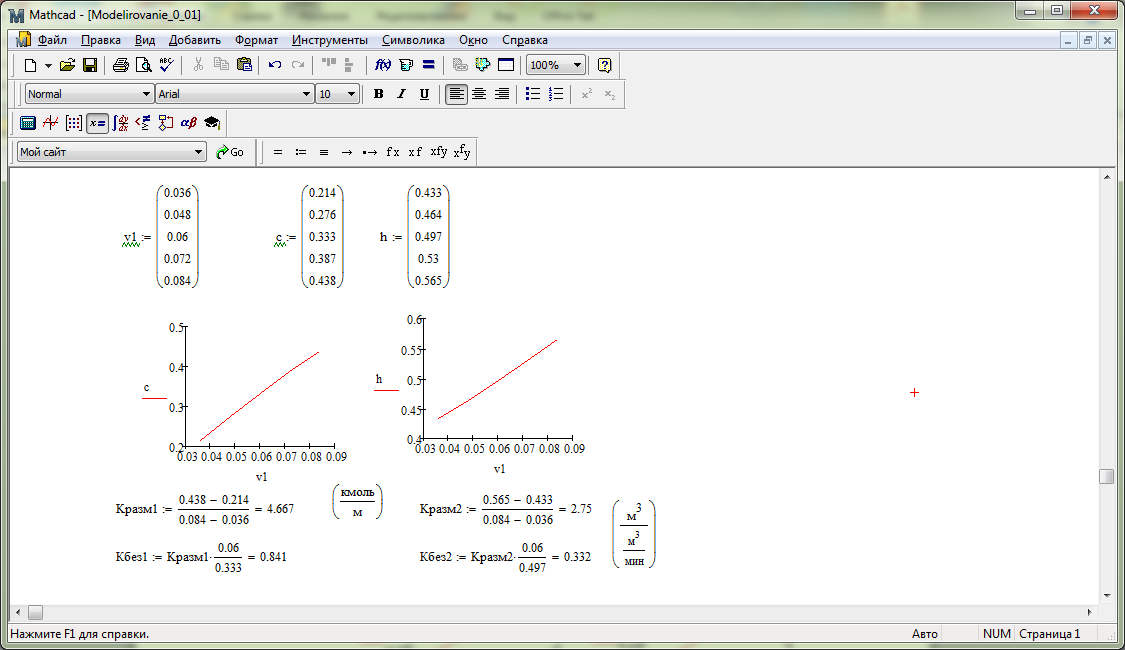
Статика Каналы v 1
Рис.2 Статические характеристики по каналам v1 Вывод: Статические характеристики по данным каналам близки к линейным. Каналы v 2
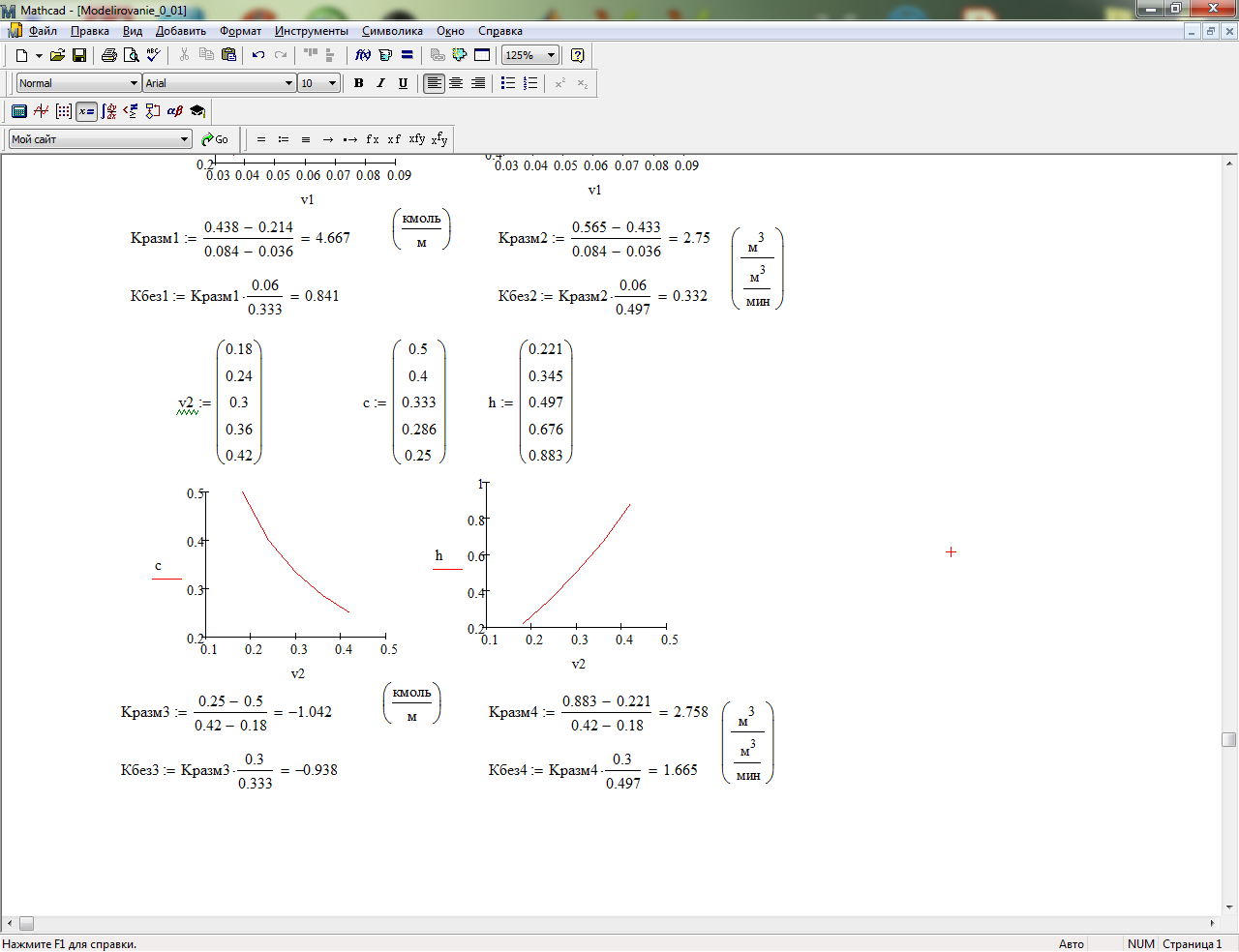
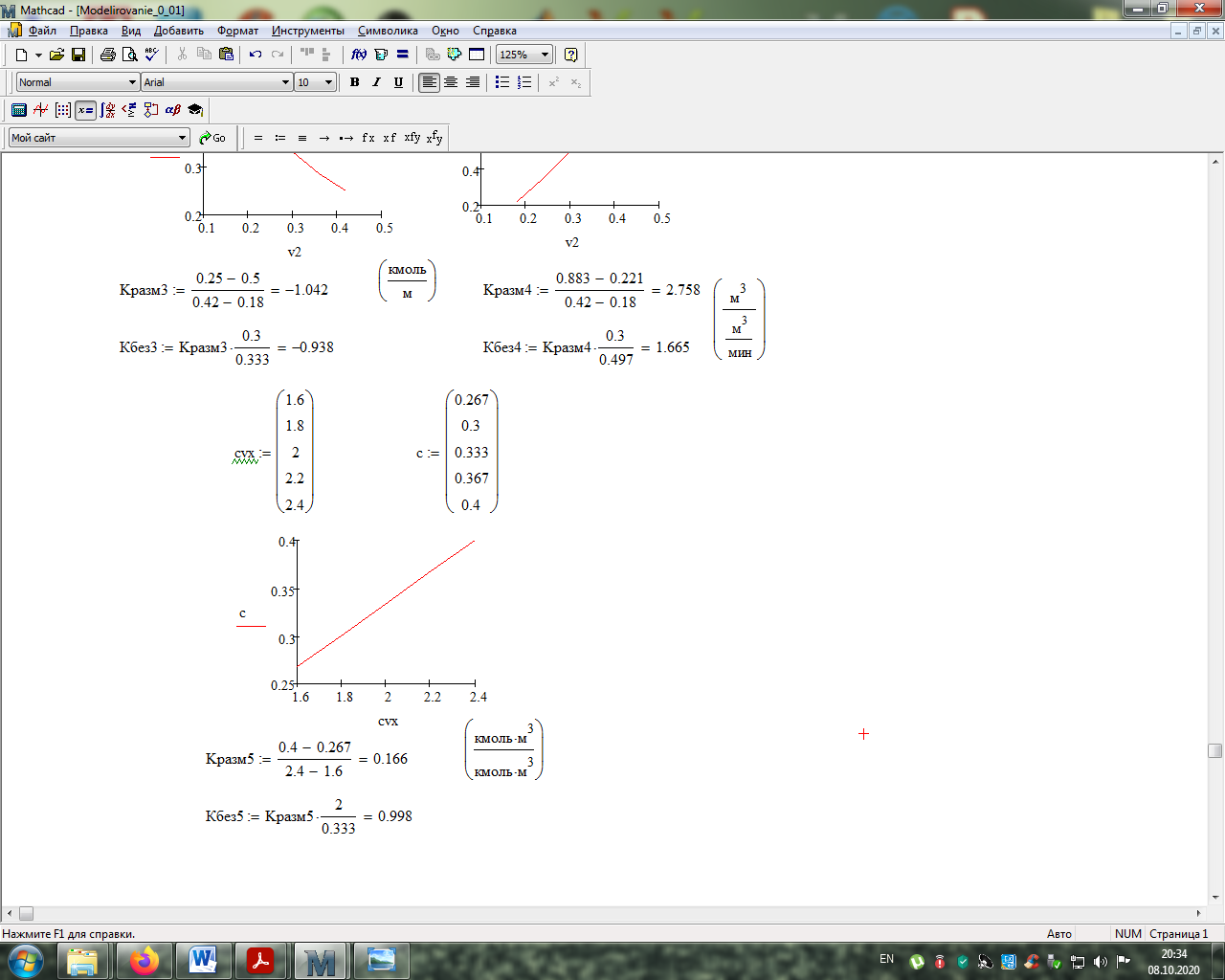
Рис.3 Статические характеристики по каналам v2 Вывод: Статические характеристики по данным каналам близки к линейным. Канал C вх
Рис. 4 Статическая характеристика по каналу C вх Вывод: Статическая характеристика по данному каналу линейна.
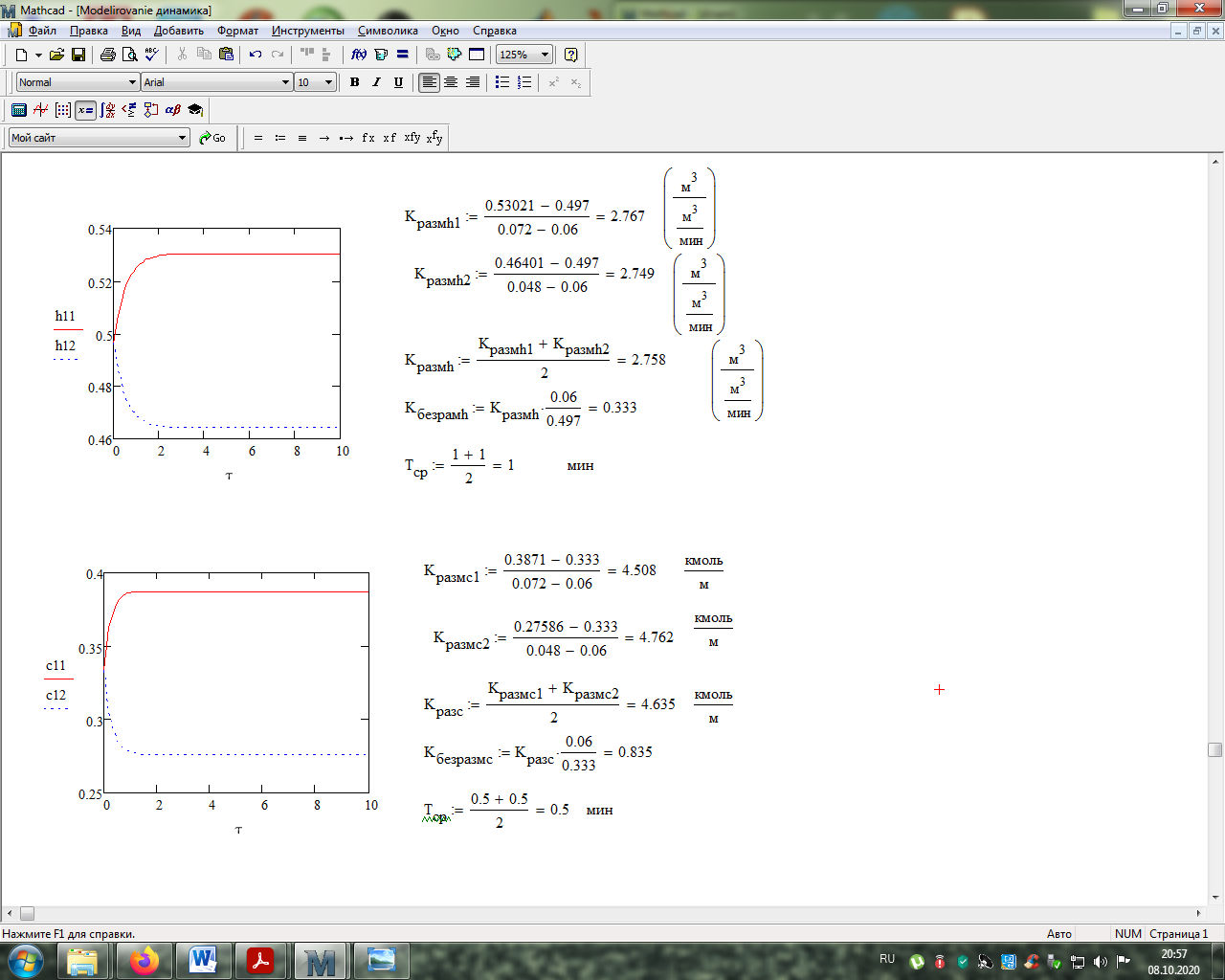
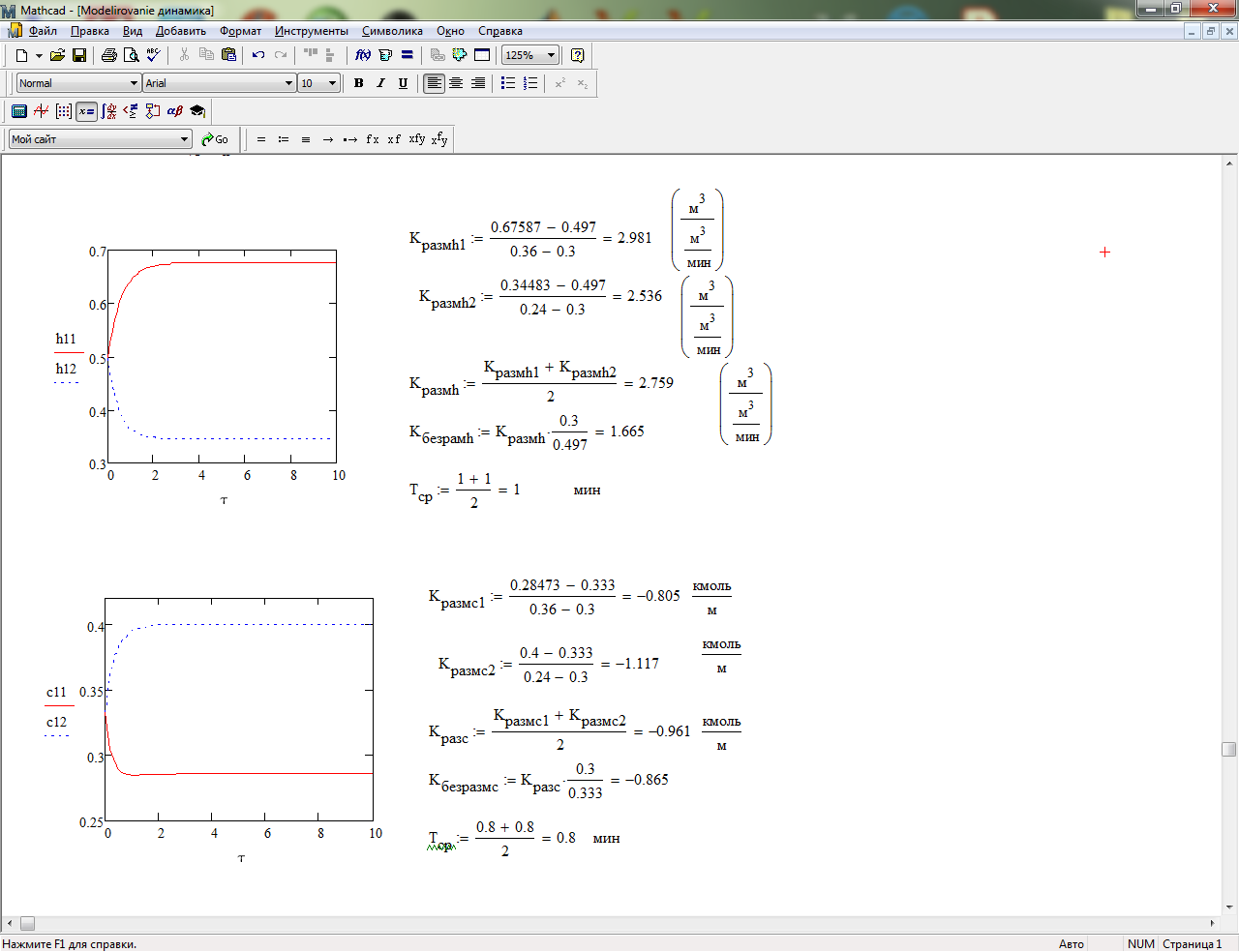
Динамика Каналы v 1
Рис. 5 Динамические характеристики по каналам v1 Вывод: Из графиков видим, что динамические характеристики по данным каналам являются апериодическими звеньями первого порядка.
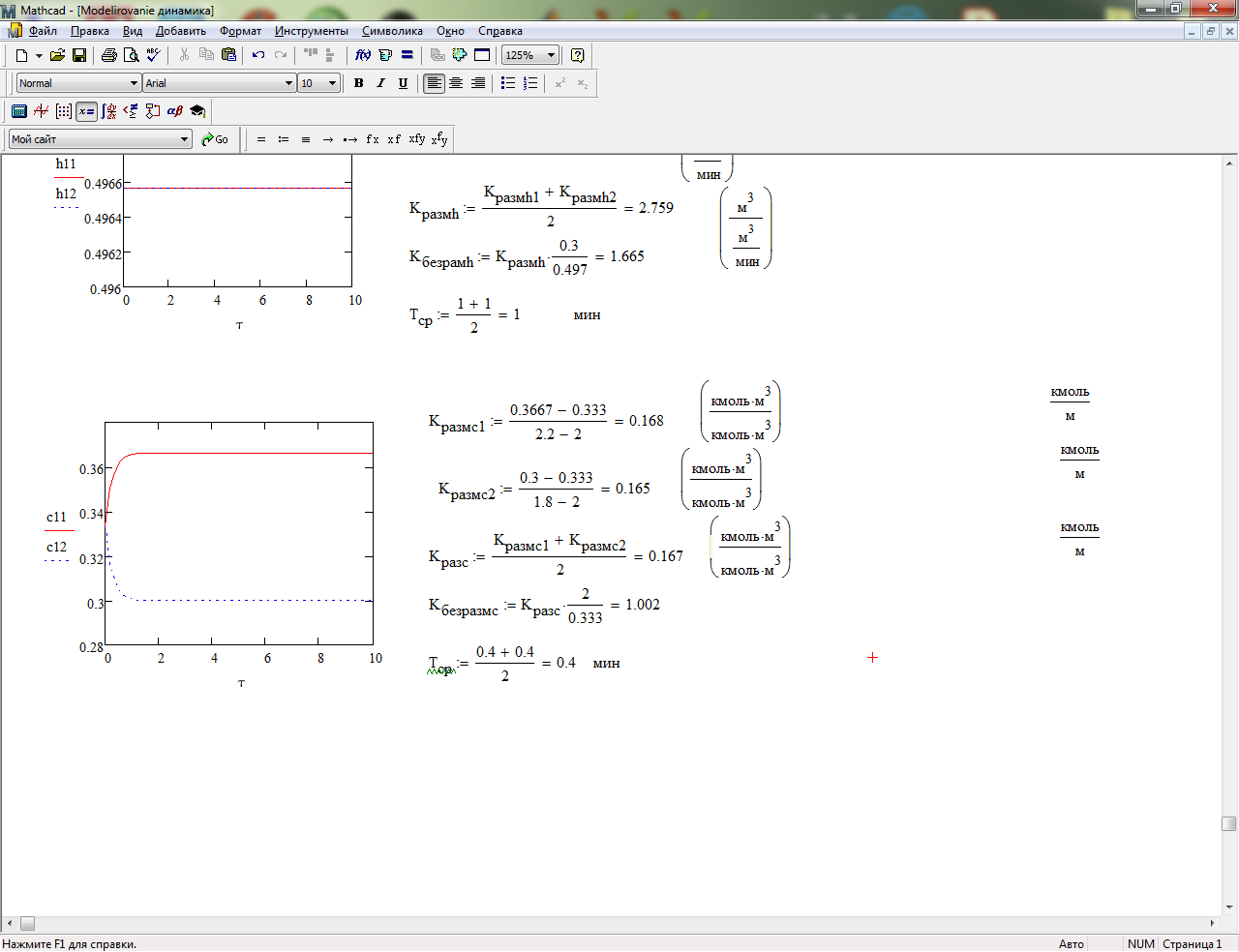
Каналы v 2
Рис. 6 Динамические характеристики по каналам v2 Вывод: Из графиков видим, что динамические характеристики по данным каналам являются апериодическими звеньями первого порядка.
Канал C вх Рис. 7 Динамическая характеристика по каналу C вх Вывод: Из графиков видим, что динамические характеристики по данному каналу являются апериодическими звеньями первого порядка. Таблица 2 Сводная таблица результатов по исследованию статических и динамических свойств объекта управления
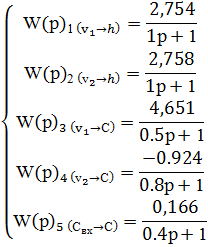
Составим математическую модель в виде системы передаточных функций:
Выводы Статические характеристики имеют практически линейный характер. Динамические характеристики описываются апериодическим звеном, переходный процесс симметричный. Определимся с выбором регулирующего воздействия, для этого обратим внимание на значение Наибольшее значение по данному коэффициенту имеет канал Cвх→С, но с рациональной точки зрения данный канала нежелательно использовать в качестве канала управления. Это обуславливается тем, что для регулирования концентрации на входе в аппарат потребуется дополнительное оборудование перед смесителем. Поэтому данный канал будет выступать в качестве возмущения.
Теперь рассмотрим два канала с входными расходами. Управлять данными расходами достаточно просто, они не требуют дополнительных затрат, осталось определиться какой именно канала будет выступать в качестве канала регулирования. Наибольшее значение коэффициента имеет канал v2→C. Данный канала служит разбавителем раствора, поэтому его можно считать оптимальным каналом регулирования.
Рис.8 Упрощенная структурная схема Расчёт компенсатора
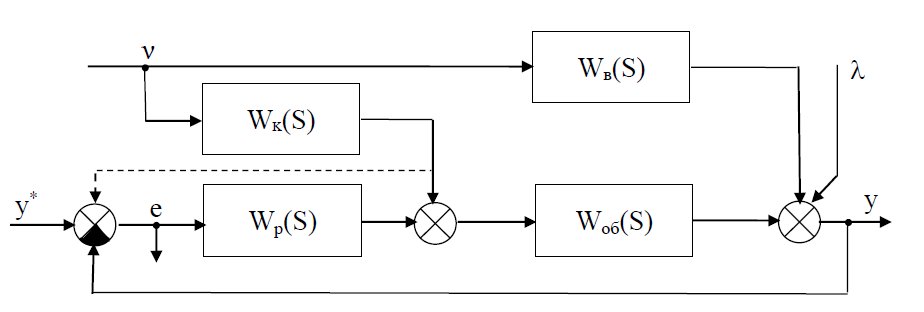
Рис. 14. Структурная схема комбинированной САР. Передаточные функции объекта и возмущения описываются:
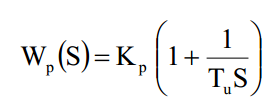
Передаточная функция ПИ-регулятора: Передаточная функция компенсатора: К сожалению, передаточная функция компенсатора, полученная по данной формуле, часто оказывается трудно реализуемой. Поэтому прибегают к упрощению Wк(s). Часто наблюдается ситуация, когда Тоб≈Тв. В этом случае Wк(S)≈-Кк, т.е. компенсатор является пропорциональным регулятором (звеном). Чтобы уменьшить быстродействие компенсатора можно аппроксимировать его апериодическим звеном первого порядка
Заключение В ходе выполнения данной лабораторной работы, провели анализ и исследовали свойство смесителя как объекта управления и автоматизации. Выполнили структурно-параметрический и алгоритмический синтез системы управления объектом. Была предложена двухконтурная система управления: один контур работает как САР по отклонения, а второй контур состоит из двух небольших контуров, объединенных комбинированным контуром. Для описания работы регуляторов Р1 и Р2 применили ПИ закон регулирования. Исследовали математическую модель системы управления на свойства инвариантности, ковариантости и устойчивости. Данная система управления является устойчивой, в силу того, что графики переходных процессов имеют затухающий характер, кроме того, подавая 20%-ое возмущение по двум основным каналам система справилась с ними. Значит её с уверенность можно назвать инвариантной к возмущениям. При изменении задания составленная САР выводила значения на новый уровень, значит она ещё и ковариантна. Обобщая всё вышестказанное, можно сделать вывод, что данная САР является работоспособной.
ИВАНОВСКИЙ ГОСУДАРСТВЕННЫЙ ХИМИКО-ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ Факультет Техники, управления и цифровой инфраструктуры Кафедра Технической кибернетики и автоматики Направление 27.03.04 Управление в технических системах Профиль Системы и средства автоматизации технологических процессов и производств
УТВЕРЖДАЮ: Зав. кафедрой __________ В.А. Зайцев «02» ноября 2020 г. З А Д А Н И Е на курсовую работу студенту Фамилия Имя Отчество курс/группа 4/37 (Ф.И.О. полностью) 1. Тема Компьютерное моделирование системы управления технологическим объектом 2. Исходные данные 1). Материалы лабораторных работ. 2). Литературные данные. 3. Содержание проекта (работы) 1). Характеристика технологического процесса как объекта автоматизации и управления. 2). Обзор подходов и методов к синтезу САР. 3). Разработка функциональной схемы системы автоматизации. 4). Структурный, алгоритмический и параметрический синтез комбинированной САР. 4. Вопросы для специальной разработки 1). Разработка программы моделирования системы управления. 2). Компьютерное моделирование системы управления. Исследование инвариантности, ковариантности и робастности комбинированной САР. 5. Руководитель работы доц., к.т.н. Невиницын В.Ю. (должность, Ф.И.О.) 6. Дата выдачи задания 02.11.2020 7. Дата предоставления законченной работы 21.12.2020 Руководитель Невиницын В.Ю. (Ф.И.О., подпись) Студент ФИО (Ф.И.О., подпись) Содержание Введение. 4 1. Характеристика технологического процесса как объекта автоматизации и управления. 5 1.1 Описание технологического процесса. 5 1.2 Режимно-технологические и конструктивные параметры процесса. 6 1.3 Математическое описание аппарата. 6 1.4 Программные средства моделирования объекта. 8 1.5. Исследование статических и динамических характеристик объекта. 9 1.6 Выводы.. 14 2. Структурные схемы систем управления. Принципы управления. 15 3. Разработка упрощенной схемы автоматизации. 17 4. Синтез комбинированной системы управления. 18 4.1 Структурный синтез системы управления. 18 4.2 Алгоритмический синтез системы управления. 18 4.3 Параметрический синтез системы управления. 19 5. Моделирование системы управления. 22 5.1 Разработка программы моделирования системы управления. 22 5.2 Исследование инвариантности к возмущающим факторам. 23 5.2 Исследование ковариантности с задающими воздействиями. 25 5.3 Анализ результатов моделирования. 27 Заключение. 28
Введение Целью производства является получение готового продукта путем переработки сырья, выбрав для этого более эффективный способ. Для того чтобы этот способ функционировал должным образом необходимо проводить контроль состояния и сформировать подобающее управляющее воздействие при отклонении технологических параметров от нормального значения. Эту задачу решает автоматизированная система управления технологическим процессом. Первым этапом разработки автоматизированной системы управления технологическим процессом является разработка системы автоматического управления технологическим процессом, которая предполагает построение аналитическим или экспериментальным путем, математической модели объекта. На втором этапе анализируются статические и динамические свойства и характеристики объекта. Таким образом, для разработки автоматизированной системы управления необходима математическая модель технологического процесса. Для того чтобы достичь поставленной цели, будет необходимо решить ряд задач: 1. Провести анализ емкостного аппарата как объекта управления и автоматизации: разработать концептуальную модель ТП, разработать математическую модель для условий статики и динамики, провести оценку результатов и выбрать регулирующие воздействия; 2. Выполнить структурно-алгоритмический и параметрический синтез системы управления: построить функциональную схему автоматизации, на основе её построить структурную модель, выбрать закон регулирования, рассчитать настройки регуляторов; 3. Выполнить моделирование системы управления: разработать программные средства, исследовать систему на свойства инвариантности и ковариантности.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-08; просмотров: 78; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.135.198.49 (0.087 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 C, v 1
C, v 1