Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Функции оболочки в операционной системе Linux .
В Linux терминал обеспечивает доступ к специальной программе — командной оболочке (чаще всего bash). Она занимается интерпретацией (переводом на машинный язык) команд пользователя. Почему "оболочка"? Наверное потому, что она как бы обволакивает операционную систему, позволяя человеку не вдаваться в подробности реализации функций системы, и, тем самым, облегчает работу. Итак, через терминал (или консоль) мы получаем доступ к командной оболочке. В операционной системе Linux работать с командной оболочкой можно двумя способами: в графическом режиме и текстовом. Оболочка, или просто shell (это слово часто не переводят, а оставляют в английском написании), — это программа, которая осуществляет все общение с пользователем. Именно оболочка воспринимает все команды, вводимые пользователем с клавиатуры, и организует исполнение этих команд. Поэтому оболочку можно назвать еще командным процессором (более привычный термин для пользователя DOS, не правда ли?). Строго говоря, когда выше говорилось, например, "система выводит приглашение", это неправильно, поскольку приглашение выводит именно оболочка, ожидая ввода пользователем очередной команды. Каждый раз, когда очередной пользователь входит в систему, команда login запускает для него командный процессор — оболочку. Если вы логировались со второго терминала под именем пользователя jim (или под другим выбранным вами именем), то обратите теперь внимание на различие в приглашениях у пользователей root и jim. У пользователя rootприглашение оканчивается символом #, а у всех остальных пользователей — символом $. Оболочку может запускать не только команда login. Вы можете просто ввести команду bash (именно так называется программа-оболочка в системе Red Hat Linux) и тем самым запустить новый экземпляр оболочки. Выходя из него (по команде exit или по комбинации клавиш <Ctrl >+< D>) вы вернетесь к предыдущему экземпляру оболочки. Оболочка bash является не только командным процессором, но и мощным языком программирования. В ней имеется целый ряд встроенных (внутренних) команд и операторов, а, кроме того, в качестве команды может использоваться любая программа, хранящаяся в виде файла на диске. 18. Алгоритмы планирования процессов, находящихся в состоянии готовности. Вытесняющее и невытесняющее планирование.
Важнейшей частью операционной системы, непосредственно влияющей на функционирование вычислительной машины, является подсистема управления процессами. Процесс (или по-другому, задача) - абстракция, описывающая выполняющуюся программу. Для операционной системы процесс представляет собой единицу работы, заявку на потребление системных ресурсов. Подсистема управления процессами планирует выполнение процессов, то есть распределяет процессорное время между несколькими одновременно существующими в системе процессами, а также занимается созданием и уничтожением процессов, обеспечивает процессы необходимыми системными ресурсами, поддерживает взаимодействие между процессами. В многозадачной (многопроцессной) системе процесс может находиться в одном из трех основных состояний: ВЫПОЛНЕНИЕ - активное состояние процесса, во время которого процесс обладает всеми необходимыми ресурсами и непосредственно выполняется процессором; ОЖИДАНИЕ - пассивное состояние процесса, процесс заблокирован, он не может выполняться по своим внутренним причинам, он ждет осуществления некоторого события, например, завершения операции ввода-вывода, получения сообщения от другого процесса, освобождения какого-либо необходимого ему ресурса; ГОТОВНОСТЬ - также пассивное состояние процесса, но в этом случае процесс заблокирован в связи с внешними по отношению к нему обстоятельствами: процесс имеет все требуемые для него ресурсы, он готов выполняться, однако процессор занят выполнением другого процесса. В ходе жизненного цикла каждый процесс переходит из одного состояния в другое в соответствии с алгоритмом планирования процессов, реализуемым в данной операционной системе. Типичный граф состояний процесса показан на рисунке 2.1. В состоянии ВЫПОЛНЕНИЕ в однопроцессорной системе может находиться только один процесс, а в каждом из состояний ОЖИДАНИЕ и ГОТОВНОСТЬ - несколько процессов, эти процессы образуют очереди соответственно ожидающих и готовых процессов. Жизненный цикл процесса начинается с состояния ГОТОВНОСТЬ, когда процесс готов к выполнению и ждет своей очереди. При активизации процесс переходит в состояние ВЫПОЛНЕНИЕ и находится в нем до тех пор, пока либо он сам освободит процессор, перейдя в состояние ОЖИДАНИЯ какого-нибудь события, либо будет насильно "вытеснен" из процессора, например, вследствие исчерпания отведенного данному процессу кванта процессорного времени. В последнем случае процесс возвращается в состояние ГОТОВНОСТЬ. В это же состояние процесс переходит из состояния ОЖИДАНИЕ, после того, как ожидаемое событие произойдет.
Алгоритмы планирования процессов Планирование процессов включает в себя решение следующих задач:
Первые две задачи решаются программными средствами, а последняя в значительной степени аппаратно. Существует множество различных алгоритмов планирования процессов, по разному решающих вышеперечисленные задачи, преследующих различные цели и обеспечивающих различное качество мультипрограммирования. Среди этого множества алгоритмов рассмотрим подробнее две группы наиболее часто встречающихся алгоритмов: алгоритмы, основанные на квантовании, и алгоритмы, основанные на приоритетах. В соответствии с алгоритмами, основанными на квантовании, смена активного процесса происходит, если:
Процесс, который исчерпал свой квант, переводится в состояние ГОТОВНОСТЬ и ожидает, когда ему будет предоставлен новый квант процессорного времени, а на выполнение в соответствии с определенным правилом выбирается новый процесс из очереди готовых. Таким образом, ни один процесс не занимает процессор надолго, поэтому квантование широко используется в системах разделения времени. Граф состояний процесса, изображенный на рисунке 2.1, соответствует алгоритму планирования, основанному на квантовании. Кванты, выделяемые процессам, могут быть одинаковыми для всех процессов или различными. Кванты, выделяемые одному процессу, могут быть фиксированной величины или изменяться в разные периоды жизни процесса. Процессы, которые не полностью использовали выделенный им квант (например, из-за ухода на выполнение операций ввода-вывода), могут получить или не получить компенсацию в виде привилегий при последующем обслуживании. По разному может быть организована очередь готовых процессов: циклически, по правилу "первый пришел - первый обслужился" (FIFO) или по правилу "последний пришел - первый обслужился" (LIFO). Другая группа алгоритмов использует понятие "приоритет" процесса. Приоритет - это число, характеризующее степень привилегированности процесса при использовании ресурсов вычислительной машины, в частности, процессорного времени: чем выше приоритет, тем выше привилегии. Приоритет может выражаться целыми или дробными, положительным или отрицательным значением.Чем выше привилегии процесса, тем меньше времени он будет проводить в очередях. Приоритет может назначаться директивно администратором системы в зависимости от важности работы или внесенной платы, либо вычисляться самой ОС по определенным правилам, он может оставаться фиксированным на протяжении всей жизни процесса либо изменяться во времени в соответствии с некоторым законом. В последнем случае приоритеты называются динамическими.
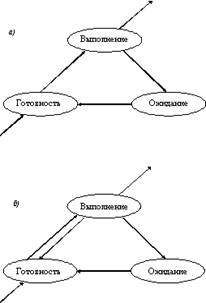
Существует две разновидности приоритетных алгоритмов: алгоритмы, использующие относительные приоритеты, и алгоритмы, использующие абсолютные приоритеты. В обоих случаях выбор процесса на выполнение из очереди готовых осуществляется одинаково: выбирается процесс, имеющий наивысший приоритет. По разному решается проблема определения момента смены активного процесса. В системах с относительными приоритетами активный процесс выполняется до тех пор, пока он сам не покинет процессор, перейдя в состояние ОЖИДАНИЕ (или же произойдет ошибка, или процесс завершится). В системах с абсолютными приоритетами выполнение активного процесса прерывается еще при одном условии: если в очереди готовых процессов появился процесс, приоритет которого выше приоритета активного процесса. В этом случае прерванный процесс переходит в состояние готовности. На рисунке 2.2 показаны графы состояний процесса для алгоритмов с относительными (а) и абсолютными (б) приоритетами.
Во многих операционных системах алгоритмы планирования построены с использованием как квантования, так и приоритетов. Например, в основе планирования лежит квантование, но величина кванта и/или порядок выбора процесса из очереди готовых определяется приоритетами процессов. Вытесняющие и невытесняющие алгоритмы планирования Существует два основных типа процедур планирования процессов - вытесняющие (preemptive) и невытесняющие (non-preemptive). Non-preemptive multitasking - невытесняющая многозадачность - это способ планирования процессов, при котором активный процесс выполняется до тех пор, пока он сам, по собственной инициативе, не отдаст управление планировщику операционной системы для того, чтобы тот выбрал из очереди другой, готовый к выполнению процесс. Preemptive multitasking - вытесняющая многозадачность - это такой способ, при котором решение о переключении процессора с выполнения одного процесса на выполнение другого процесса принимается планировщиком операционной системы, а не самой активной задачей. Понятия preemptive и non-preemptive иногда отождествляются с понятиями приоритетных и бесприоритетных дисциплин, что совершенно неверно, а также с понятиями абсолютных и относительных приоритетов, что неверно отчасти. Вытесняющая и невытесняющая многозадачность - это более широкие понятия, чем типы приоритетности. Приоритеты задач могут как использоваться, так и не использоваться и при вытесняющих, и при невытесняющих способах планирования. Так в случае использования приоритетов дисциплина относительных приоритетов может быть отнесена к классу систем с невытесняющей многозадачностью, а дисциплина абсолютных приоритетов - к классу систем с вытесняющей многозадачностью. А бесприоритетная дисциплина планирования, основанная на выделении равных квантов времени для всех задач, относится к вытесняющим алгоритмам.
Основным различием между preemptive и non-preemptive вариантами многозадачности является степень централизации механизма планирования задач. При вытесняющей многозадачности механизм планирования задач целиком сосредоточен в операционной системе, и программист пишет свое приложение, не заботясь о том, что оно будет выполняться параллельно с другими задачами. При этом операционная система выполняет следующие функции: определяет момент снятия с выполнения активной задачи, запоминает ее контекст, выбирает из очереди готовых задач следующую и запускает ее на выполнение, загружая ее контекст. При невытесняющей многозадачности механизм планирования распределен между системой и прикладными программами. Прикладная программа, получив управление от операционной системы, сама определяет момент завершения своей очередной итерации и передает управление ОС с помощью какого-либо системного вызова, а ОС формирует очереди задач и выбирает в соответствии с некоторым алгоритмом (например, с учетом приоритетов) следующую задачу на выполнение. Такой механизм создает проблемы как для пользователей, так и для разработчиков. Для пользователей это означает, что управление системой теряется на произвольный период времени, который определяется приложением (а не пользователем). Если приложение тратит слишком много времени на выполнение какой-либо работы, например, на форматирование диска, пользователь не может переключиться с этой задачи на другую задачу, например, на текстовый редактор, в то время как форматирование продолжалось бы в фоновом режиме. Эта ситуация нежелательна, так как пользователи обычно не хотят долго ждать, когда машина завершит свою задачу. Поэтому разработчики приложений для non-preemptive операционной среды, возлагая на себя функции планировщика, должны создавать приложения так, чтобы они выполняли свои задачи небольшими частями. Например, программа форматирования может отформатировать одну дорожку дискеты и вернуть управление системе. После выполнения других задач система возвратит управление программе форматирования, чтобы та отформатировала следующую дорожку. Подобный метод разделения времени между задачами работает, но он существенно затрудняет разработку программ и предъявляет повышенные требования к квалификации программиста. Программист должен обеспечить "дружественное" отношение своей программы к другим выполняемым одновременно с ней программам, достаточно часто отдавая им управление. Крайним проявлением "недружественности" приложения является его зависание, которое приводит к общему краху системы. В системах с вытесняющей многозадачностью такие ситуации, как правило, исключены, так как центральный планирующий механизм снимет зависшую задачу с выполнения.
Однако распределение функций планировщика между системой и приложениями не всегда является недостатком, а при определенных условиях может быть и преимуществом, потому что дает возможность разработчику приложений самому проектировать алгоритм планирования, наиболее подходящий для данного фиксированного набора задач. Так как разработчик сам определяет в программе момент времени отдачи управления, то при этом исключаются нерациональные прерывания программ в "неудобные" для них моменты времени. Кроме того, легко разрешаются проблемы совместного использования данных: задача во время каждой итерации использует их монопольно и уверена, что на протяжении этого периода никто другой не изменит эти данные. Существенным преимуществом non-preemptive систем является более высокая скорость переключения с задачи на задачу. Примером эффективного использования невытесняющей многозадачности является файл-сервер NetWare, в котором, в значительной степени благодаря этому, достигнута высокая скорость выполнения файловых операций. Менее удачным оказалось использование невытесняющей многозадачности в операционной среде Windows 3.х. Однако почти во всех современных операционных системах, ориентированных на высокопроизводительное выполнение приложений (UNIX, Windows NT, OS/2, VAX/VMS), реализована вытесняющая многозадачность. В последнее время дошла очередь и до ОС класса настольных систем, например, OS/2 Warp и Windows 95. Возможно в связи с этим вытесняющую многозадачность часто называют истинной многозадачностью. 19.Алгоритм планирования FCFS. Анализ алгоритма с использованием простой модели очередности исполнения процессов.
1. First - Come, First - Served (FCFS - первым пришел, первым обслужен). Представим себе, что процессы, находящиеся в состоянии готовность, выстроены в очередь. Когда процесс переходит в состояние готовность, он помещается в конец этой очереди. Выбор нового процесса для исполнения осуществляется из начала очереди с удалением оттуда ссылки на него. Очередь подобного типа имеет в программировании специальное наименование – FIFO, сокращение от First In, First Out (первым вошел, первым вышел). Такой алгоритм выбора процесса осуществляет невытесняющее планирование. Процесс занимает столько процессорного времени, сколько ему необходимо. После этого для выполнения выбирается новый процесс из начала очереди. Преимуществом алгоритма FCFS является легкость его реализации, но в то же время он имеет и много недостатков. Если у нас есть процесс с длительным временем исполнения, то короткие процессы, перешедшие в состояние готовность после длительного процесса, будут очень долго ждать начала выполнения. Поэтому алгоритм FCFS практически неприменим для систем разделения времени – слишком большим получается среднее время отклика в интерактивных процессах. Преимуществом алгоритма FCFS является легкость его реализации, в то же время он имеет и много недостатков. Рассмотрим следующий пример. Пусть в состоянии готовность находятся три процесса p0, p1 и p2, для которых известны времена их очередных CPU burst. Эти времена приведены в таблице 3.1. в некоторых условных единицах. Для простоты будем полагать, что вся деятельность процессов ограничивается использованием только одного промежутка CPU burst, что процессы не совершают операций ввода-вывода, и что время переключения контекста пренебрежимо мало.
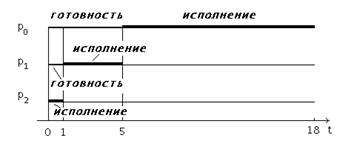
Если процессы расположены в очереди процессов готовых к исполнению в порядке p0, p1, p2, то картина их выполнения выглядит так, как показано на рисунке 3.2. Первым для выполнения выбирается процесс p0, который получает процессор на все время своего CPU burst, т. е. на 13 единиц времени. После его окончания в состояние исполнение переводится процесс p1, занимая процессор на 4 единицы времени. И, наконец, возможность работать получает процесс p2. Время ожидания для процесса p0 составляет 0 единиц времени, для процесса p1 — 13 единиц, для процесса p2 — 13 + 4 = 17 единиц. Таким образом, среднее время ожидания в этом случае — (0 + 13 + 17)/3 = 10 единиц времени. Полное время выполнения для процесса p0 составляет 13 единиц времени, для процесса p1 — 13 + 4 = 17 единиц, для процесса p2 — 13 + 4 + 1 = 18 единиц. Среднее полное время выполнения оказывается равным (13 + 17 + 18)/3 = 16 единицам времени.
Если те же самые процессы расположены в порядке p2, p1, p0, то картина их выполнения будет соответствовать рисунку 3.3. Время ожидания для процесса p0 равняется 5 единицам времени, для процесса p1 — 1 единице, для процесса p2 — 0 единиц. Среднее время ожидания составит (5 + 1 + 0)/3 = 2 единицы времени. Это в 5 (!) раз меньше, чем в предыдущем случае. Полное время выполнения для процесса p0 получается равным 18 единицам времени, для процесса p1 — 5 единицам, для процесса p2 — 1 единице. Среднее полное время выполнения составляет (18 + 5 + 1)/3 = 6 единиц времени, что почти в 2,7 раза меньше чем при первой расстановке процессов. Как видим, среднее время ожидания и среднее полное время выполнения для этого алгоритма существенно зависят от порядка расположения процессов в очереди. Если у нас есть процесс с длительным CPU burst, то короткие процессы, перешедшие в состояние готовность после длительного процесса, будут очень долго ждать начала своего выполнения. Поэтому алгоритм FCFS практически неприменим для систем разделения времени. Слишком большим получается среднее время отклика в интерактивных процессах.
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-01-14; просмотров: 110; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.205.154 (0.018 с.) |