
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматическая обработка радиолокационной информации в САРПСодержание книги
Поиск на нашем сайте
Процесс автоматической обработки радиолокационной информации условно подразделяют на да этапа - первичную и вторичную обработку. На этапе первичной обработки из поступающих в САРП на каждом обзоре РЛС видеосигналов (и данных о пеленге антенны) вырабатываются текущие полярные координаты цели (дальность и пеленг). В связи с многообразием сигнально - помеховых ситуаций (помехи от морского волнения, низких облаков, тумана, снегопада и т. д.) высокая эффективность обработки в каждой ситуации может быть достигнута лишь при использовании гибкого (адаптивного) подхода, включающего непрерывное распознавание ситуации в данной части обзора РЛС и выбор наиболее подходящего для данной ситуации алгоритма обработки из имеющегося набора алгоритмов. Многообразие методов первичной обработки связано также с тем, что существуют различные пути организации этого процесса. Наиболее характерной особенностью этапа вторичной обработки является поступление на его вход в каждом обзоре текущих координат цели (с выхода первичной обработки), по совокупности которых (в течении нескольких десятков обзоров) вычисляются параметры относительного движения целей (курс и скорость). Наиболее лучшим техническим средством реализации алгоритмов первичной обработки являются специализированные цифровые вычислительные машины с универсальной системой команд (СЦВМ). Так как СЦВМ способна работать только с цифрами, то непрерывный видеосигнал, поступающий от РЛС, для обработки преобразуется в цифровую форму (в окрестности отметки цели, называемой физическим стробом). Размеры строба при вводе на сопровождение обычно больше, а затем (по мере уточнения курса и скорости) уменьшаются почти до размеров отметки. Эта мера, необходимая для исключения влияния посторонних отметок и помех на процесс слежения, одновременно уменьшает время, затрачиваемое ЦВМ на первичную обработку (в ряде случаев время обработки уменьшается в 3-4 раза). На Рис.1 показана форма строба.
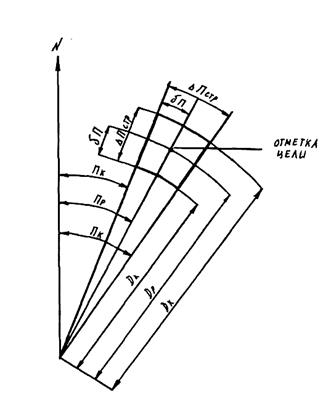
Рис. 1. Параметры строба.
Для ручного ввода цели на автосопровождение судоводитель должен совместить электронный маркер (круг с точкой в центре) на экране индикатора с отметкой цели, и нажать клавишу "Ввод". В первых двух обзорах после нажатия клавиши размеры строба фиксированы:
на шкале 16 миль -1440 м × 5°; на шкале 4,2 миль - 720 м × 5°; если дальность менее 4 миль - 720 м × 10°. В первых двух обзорах координаты начала строба не меняются, а так как в стробе могут оказаться и помехи, положение которых от обзора к обзору меняется, то в качестве отметки из нескольких возможных выбирается такая, угловой размер которой более чем 0,4°, а ее координаты (П1Д1 - в первом стробе и П2Д2 - во втором стробе) имеют разность менее допусков ∆Л, ∆Д: 0,4 > ∆ П = П1 - П2; 150м > ∆ Д = Д1 - Д2.
Величины допусков выбраны из условия обеспечения захвата цели, движущейся со споростью 60 уз. Если таких отметок оказалось более одной, выбирается отметка с наибольшими геометрическими размерами. Третий строб (на третий обзор) строится так, чтобы избранная отметка была в его центре с учетом перемещения нашего судна, а его протяженность по дальности уменьшается до 720м. До определения момента начала строба по угловой координате величина пеленга начала строба Пн записанная в оперативном запоминающем устройстве (ОЗУ), один раз на каждой развертке дальности (т. е. с частотой повторения зондирующего импульса РЛС) проверяется на равенство с текущим пеленгом антенны РЛС (Па). Для формирования текущего двоичного кода Па СЦВМ прибавляет единицу младшего разряда к коду Па в момент прихода тактового импульса пеленга, поступающего от механического датчика импульсов, вращающегося синхронно с антенной РЛС. Проверка равенства делается один раз на каждой развертке строба. Так как тактовые импульсы формируются через каждые 5' угла поворота антенны (т. е. 4096 импульсов на оборот антенны, что соответствует частоте 1365 такт/с при скорости вращения 90 град/с), то при более низких (чем частота тактов) частотах следований зондирующих импульсов (750 Гц) момент начала строба может определяться с ошибкой, достигающей 5'. Через одну минуту после ввода (когда скорость и курс уже известны) угловой размер строба (∆Тстр) начинает уменьшаться:
∆Пстр= 0,5° + ∆Потм + 0,5°,
где ∆Потм, - угловой размер отметки цели. Если в каком-либо обзоре отметка отсутствовала (пропуск), угловой размер строба делается равным начальному, а затем уменьшается как обычно. Для обеспечения захвата и сопровождения вблизи берегов анализируются геометрические размеры отметок;
все отметки размеры которых больше 460 м по дальности и 5° по углу, отбрасываются; если в стробе обнаружено несколько отметок, отбирается отметка максимального геометрического размера ("веса") при условии, что она не примыкает к границам строба по дальности; если отметка максимального веса примыкает к границам строба по дальности, то она отбрасывается. Определение пеленга и дальности цели осуществляется путем нахождения центра тяжести плоской фигуры которую образует отметка. Так как в большинстве САРП используется одно устройство кодирования видеосигнала (т. е. в текущем периоде зондирования может быть сформирован лишь один строб), то для слежения за несколькими целями, стробы которые пересекаются по углу, применяется поочередное формирование их стробов. Таким образом, если на одном пеленге есть пять стробов с векторами, то в течении пяти обзоров каждая цель будет обслужена один раз. Если же среди группы целей на одном пеленге есть еще одна без вектора, то в течении одной минуты половина обзоров будет отдана этой цели, а вторая половина - равномерно распределена между целями, скорость которых уже известна. Если две отметки сблизились настолько, что их стробы накладываются друг на друга, то применяется инерционное сопровождение - первичная обработка в этом случае не делается, координаты не измеряются, положения целей (и стробы) экстрополируются в каждый обзор до тех пор, пока стробы не перестанут пересекаться.
Алгоритм аналого-цифрового преобразования радиолокационного сигнала
Для ввода сигнала в СЦВМ и последующей его обработки необходимо преобразовать непрерывное по времени и амплитуде (аналоговое) напряжение с выхода видеоусилителя РЛС в цифровую форму. Дискретизацию (по времени) и бинарное (0 либо 1) квантование (по амплитуде) производит устройство кодирования видеосигнала (УКВС) в физическом стробе (длительностью 5 либо 10 мкс) в каждом периоде зондирования в пределах углового строба. В результате работы УКВС на одной развертке дальности в 16 - разрядном сдвиговом регистре формируется последовательность единиц и нулей, причем номер разряда регистра умноженный на 46 м, точно соответствует дальности единицы (либо нуля) относительно начала строба. Для определения физического начала строба дальности из СЦВМ в каждом периоде зондирования (в пределах углового строба содержится около 50 разверток дальности) выдается в схему сравнения дальности (ССД) код дальности начала (ДН) строба. В момент прихода в УКВС импульса "0" дальности развертки счетчик ССД начинает считать тактовые импульсы дальности (формирует текущий код дальности), и на схеме совпадения ловится момент равенства текущего кода дальности и кода ДН. В момент равенства (начало строба дальности) УКВС преобразует код автоматического регулятора усиления (АРУ), (который был выдан из СЦВМ вместе с кодом ДН) в импульс напряжения АРУ и подает его на управляющий вход усилителя промежуточной частоты (УПЧ) РЛС, а также начинает запись единиц (фактов превышения порога напряжением видеосигнала) и нулей (не превышений порога) в сдвиговый регистр. После записи 16 разрядов работа устройства прекращается. Сдвиговый регистр готов к обмену с СЦВМ. Импульс АРУ обрывается, в УПЧ восстанавливается усиление, установленное судоводителем. После окончания прямого хода развертки дальности (на шкале 16 миль - 200 мкс) СЦВМ прерывает основную работу и списывает код из регистра видеосигнала. Таким образом формируется один столбик бинарной матрицы. Описанное взаимодействие УКВС и СЦВМ продолжается подряд 50 разверток и в результате в ОЗУ записывается бинарная матрица 16×50, соответствующая участку зоны обзора 720м × 5° в окрестности сопровождаемой цели.
Группа единиц в матрице, соответствующая цели, называется бинарными радиолокационным портретом цели (РЛП). Понятно, что может существовать РЛП морской поверхности участка берега облака и т. д.
5.2 Принципы технической реализации и конструктивного исполнения "Бриз - Е"
Автоматизированный радиолокационный индикатор "Бриз-Е" как техническое устройство выполняет следующие функции: • прием и обработка радиолокационной информации, а также прием данных лага и гирокомпаса; • отображение первичной и вторичной радиолокационной информации на экране ЭЛТ; • обмен управляющими и информационными сигналами с судоводителем. "Бриз - Е" имеет радиально-круговую развертку с масштабами 4, 8, 16 и 32 мили на ЭЛТ с диаметром рабочего участка экрана 400 мм. Во временных промежутках между развертками на масштабах 4, 8, 16 миль на ЭЛТ отображается вторичная радиолокационная информация, которая является результатом совместной обработки видеосигнала и данных о курсе и скорости в вычислительном устройстве, связанном каналами обмена с органами управления и индикации. По функциональному назначения "Бриз-Е" делится на следующие функциональные части (каналы): • канал видеосигнала; • канал информационно-вычислительный; • канал разверток; • канал обработки пеленга антенны; • канал управления, контроля и индикации; • канал синхронизации. Канал видеосигнала
Предназначен для квантования видеосигнала по амплитуде с целью его ввода в ЦВМ и отображения посредством радиально-круговой развертки на экране ЭЛТ. Канал состоит из блока предварительной обработки видеоусилителя и блока ЭЛТ (Рис. 2). Блок предварительной обработки предназначен для обработки видеосигналов, вырабатываемых радиолокационной станцией. В блоке осуществляется усиление видеосигналов положительной и отрицательной полярности, цифровая автоматическая регулировка усиления в стробе дальности, бинарное квантование радиолокационных сигналов, нормирование полярности и суммирование импульса контрольного объекта с видеосигналом. Конструктивно блок размещен на одной плате.
Видеоусилитель обеспечивает усиление видеосигнала, смешивание его с импульсами подсвета курсовой метки, метод дальности, вторичной информации и другими служебными импульсами и передает результирующий сигнал на блок ЭЛТ. Конструктивно видеоусилитель выполнен в виде отдельного блока, состоящего из двух плат.
От РЛС
Рис. 2. Канал видеосигнала
Блок ЭЛТ обеспечивает отображение информации о навигационной обстановке с помощью радиально-круговой развертки и вторичной информации, поступающей от ЦВМ. В блоке предусмотрена регулировка яркости свечения линии развертки на экране ЭЛТ от минимальной (развертка погашена) до максимальной (расфокусированная линия развертки). Блок также обеспечивает возможность перемещения начала развертки (центровка) по обеим координатам немение чем на 30 мм. В состав блока ЭЛТ входят два усилителя подсветов (один резервный) и блок высоковольтного выпрямителя.
|
|||||||||||||
|
|
Последнее изменение этой страницы: 2020-12-09; просмотров: 262; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.142.255.103 (0.013 с.) |





