
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Назначение, комплект и структурная схема
НАЗНАЧЕНИЕ: ПРЛ "Гроза" представляет собой метеорологический радиолокатор, предназначенный для обнаружения гидрометеообразований (грозовых зон,мощнокучевой облачности) опасных для полета самолета, а также для наблюдения на экране ЭЛТ радиолокационного изображения местности, лежащей перед самолетом.
ТЕХ. ОПИСАНИЕ: Радиолокационная станция «Гроза» представляет собой импульсный радиолокатор со сканирующей в азимутальной плоскости антенной и индикатором "азимут-дальность". Она работает по принципу излучения мощных радиочастотных импульсов в узком секторе пространства, приема и усиления, отраженных от наземных или воздушных объектов сигналов и их яркостной индикации на электронно-лучевой трубке с длительным послесвечением. Объекты, отраженные сигналы от которых принимает радиолокатор, могут быть различными -плоскостные, объемные или сосредоточенные ("точечные"), обеспечивающие достаточно сильное диффузное отражение радиосигналов трехсантиметрового диапазона длин волн. К ним, в частности, относятся незастроенные участки земной поверхности, застроенные участки (мелкие, средние и крупные населенные пункты), гидрометеообразования, характеризующиеся достаточно большими диаметрами водяных капель, удерживаемых восходящими потоками воздуха (зоны грозовой деятельности, мощнокучевая облачность), мосты, плотины, отдельные крупные строения и т.д. От величины эффективной отражающей поверхности (или объема) объекта зависит максимальная дальность его обнаружения радиолокатором. Принцип действия радиолокатора "Гроза" при измерении угла сноса самолета основан на том, что отраженный от земной поверхности сигнал модулирован по частоте спектром допплеровских частот, обусловленных перемещением радиолокатора по отношению к отражающей поверхности. Размеры и форма спектра зависят, в частности, от размеров и формы диаграммы направленности радиолокатора. Так как при измерении угла сноса отраженные сигналы с несколько отличными друг от друга частотами существуют одновременно, возникает побочная амплитудная модуляция принимаемого радиолокатором совокупного сигнала спектром так называемых вторичных допплеровских частот. При совпадении проекции оси диаграммы направленности с линией пути самолета частота этой модуляции будет минимальной и близкой к нулю.
Совмещение диаграммы с линией пути достигается в радиолокаторе с помощью ручного управления движением антенны по азимуту, а положение антенны, при котором частота модуляции минимальна, определяется наблюдением линии развертки на основном индикаторе РЛС.
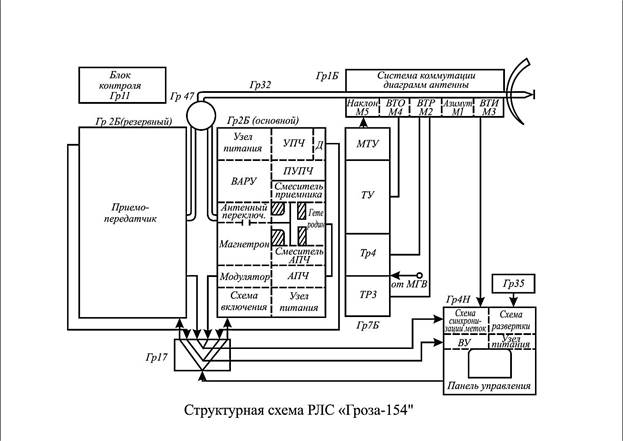
С помощью изображения можно решать следующие навигационные задачи: 1. Определять координаты радиолокационных ориентиров (курсовой угол и дальность) и по ним судить о месте нахождения самолета; 2. Предупреждать столкновение с другими самолетами и горными вершинами; 3. Определять грозовые зоны, опасные для полета самолета; 4. Совершать полет по радиолокационным ориентирам как по приводным радиостанциям; 5. Обнаруживать аэродром посадки и определять направление взлетно-посадочной полосы; 6. Определять угол сноса и путевую скорость самолета. КОМПЛЕКТ - ПРЛ "Гроза" - унифицированная конструкция. В различных вариантах комплектации он устанавливается на разных типах самолетов. Поэтому отличаются и его отдельные характеристики. Однако в том или ином варианте комплектации обязательно предусмотрены блоки (рис. 2.1): 1. Антенна, имеющая заводскую маркировку Гр1, 2. Приемопередатчик - Гр2, 3. Индикатор - Гр4 с пультом управления, 4. Блок стабилизации и управления антенной - Гр7, 5. Волноводный тракт Гр32. В период эксплуатации схемные и конструктивные решения станции совершенствуются. Наиболее значительные модификации блоков отражаются в их маркировке дополнительными буквами и цифрами.
Блок Гр1Б - антенный блок, служащий для излучения в просматриваемое пространство импульсных СВЧ-колебаний 3-сантиметрового диапазона длины волн и приема отраженных сигналов. Кроме антенны, содержит двигатели вращения антенны по азимуту и наклону, вращающий трансформатор импульсный (ВТИ) канала развертки, вращающие трансформаторы схемы стабилизации положения антенны (ВТО и ВТР), а также элементы схемы коммутации диаграммы направленности антенны.
Блок Гр2Б - приемопередающий блок, осуществляющий генерацию мощных СВЧ-импульсов, усиление принятых отраженных сигналов и питание остальных узлов и блоков радиолокатора стабилизированными выпрямленными напряжениями и переменным напряжением 40В 3000Гц.
Содержит узлы: передающего тракта в составе модулятора, магнетрона, антенного переключателя; приемного тракта в составе смесителя, предварительного усилителя промежуточной частоты (ПУПЧ), усилителя промежуточной частоты (УПЧ), схемы временной автоматической регулировки усиления (ВАРУ), гетеродина с системой автоматической подстройки частоты (АПЧ), а также узлов питания и схемы задержки включения передатчика. Второй (дублирующий) приемопередающий блок, являющийся горячим резервом первого блока и в случае выхода его из строя полностью выполняющий все его функции. Блок Гр4Н - основной индикаторный блок с пультом, осуществляющий синхронизацию работы станции, усиление видеосигналов, их развертывание и индикацию, а также управление всей работой радиолокатора. Включает в себя: видеоусилитель приемника, электронно-лучевую трубку, схему синхронизации и меток, элементы схемы развертки, узлы электропитания и пульт управления. Блок Гр7Б - блок стабилизации и управления, служащий для стабилизации зоны обзора радиолокатора в пространстве при кренах и тангаже самолета; также служит для размещения узлов и элементов схемы управления антенной. Блок Гр32 - волноводный тракт. Он предназначен для связи высокочастотного выхода передатчика с антенной. Блок – ГР – 47 - Волноводный коммутатор осуществляет подключение к антенне волноводного выхода второго (исправного) блока при выходе первого из строя. Блок ГР – 35 – эквивалент второго индикатора, состоящий из эквивалентов второй отклоняющей системы. Блок ГР – 17 - коммутационная коробка (при наличии второго приемопередатчика), обеспечивающая подключение к станции всех электрических цепей второго (исправного) блока при выходе первого из строя. Все блоки, за исключением антенного, размещены в герметичной части самолета. Антенный блок и часть волноводного тракта находятся в негерметичном носовом радиопрозрачном обтекателе. Блоки 2Б и 7Б установлены на общей монтажной раме 34-Ж, размещенной в герметизированном отсеке под полом. Рядом с монтажной рамой размещены коммутационная коробка (блок 17), на ней эквивалент второго индикатора (блок 35). Слева от рамы 34-Ж размещен контрольный разъем и волноводный фланец для подключения пульта контроля работоспособности радиолокатора. Индикатор радиолокатора (блок 4Н) размещен в средней части на раме 33-Е. При ночных полетах освещение надписей на пульте индикатора осуществляется заливающим светом от самолетных светильников, размещенных вдоль верхней части приборной доски. Кроме перечисленных блоков, в состав радиолокатора входит раздвижной тубус и легкосъемный светозащитный козырек. Тубус, установленный на индикаторе, повышает контрастность изображения на экране при его наблюдении в условиях мешающего дневного освещения. Для обеспечения нормального теплового режима приемопередатчиков в них подаетсяохлаждающий воздух от специального мотора-вентилятора, не входящего в состав радиолокатора. Электропитание радиолокатора на самолете осуществляется от трехфазной сети переменного тока с линейным напряжением 200В и частотой 400 Гц, трехфазной сети переменного тока с линейным напряжением 36В и частотой 400Гц и от бортовой сети переменного тока с напряжением 27В. При этом ток, потребляемый радиолокатором, составляет:
от сети 200В 400Гц: по первой фазе - не более 2,0 А; по второй фазе - не более 0,5 А; по третьей фазе - не более 2,5 А.
от сети 36В 400Гц: по первой фазе - не более 0,35 А; по второй фазе - не более 0,10 А; по третьей фазе - не более 0,35 А.
От сети 27 В - не более 3 А. Для защиты электросетей самолета от коротких замыканий в сеть 27В включен АЗС на 5 А ("РЛС - OTKJI."), а в сеть 200В 400Гц и 36В 400Гц - плавкие предохранители. Включение радиолокатора "Гроза 154" осуществляется включением АЗС "РЛС - ОТКЛ." щитка электропитания и последующим нажатием клавиши "РЛС" индикаторного блока. Радиолокатор сопряжен по каналам крена и тангажа с самолетнойгировертикалью МГВ. Переключатель "РЕЗЕРВ.СТАБ." аварийного отключения радиолокатора от гиродатчика и переключатель включения резервного передатчика размещены на верхнем электрощитке летчиков. Общая масса радиолокатора "Гроза 154" с монтажными рамами, но без соединительных волноводов составляет не более 48 кг, а суммарная масса его блоков не превышает 45 кг. Цепи электропитания бортовой сети постоянного и переменного напряжений соединяются с PЛC через распределительный щит самолета. Сигнал стабилизации положения антенны в плоскости горизонта подается в РЛС от гироскопического прибора (например, МГВ). Для контроля работоспособности станции применяется переносной прибор Гр 11. При отсутствии в комплекте второго индикаторного блока предусмотрено включение вместо его отклоняющей системы эквивалента Гр35.
Основные технические характеристики: 1. Дальность обнаружения при высоте полета H = 7 км: зон грозовой облачности..........................................не менее 200 км особо крупных промышленных центров …………...не менее 350 км незастроенной местности и водоемов………….. не менее 170 км горных массивов и отдельных вершин………… не менее 150 км 2. Рабочая частота (частота излучаемых СВЧ – колебаний при всех условиях эксплуатации ……………………............. 9370 ± 30МГц
3. Мощность в импульсе (импульсная мощность излучаемых радиоимпульсов при любых условиях эксплуатации) - не менее.... 9 кВт
4. Частота повторения излучаемых радиоимпульсов равна частоте электросети 200/115В……………………………………………....... 400 Гц
5. Длительность излучаемых импульсов……………......... 3,5± 0,3мкс
6. Диаграммы направленности антенны:
узкий луч — угол раствора.........................................................не более 3°
веерный луч — угол раствора в вертикальной плоскости..................... 30°
7. Сектор азимутального обзора станции в обе стороны от оси самолета.. ……………………………………………………………………………±100°
8. Скорость азимутального обзора станции, полных качаний (от левого крайнего до правого крайнего положения и обратно) …..7—13полных качаний в минуту
9. Пределы ручного наклона диаграммы направленности антенны от продольной оси самолета:
вверх..............................................................................................от 0 до +30°
вниз,......................................................................................... от 0 до -24,5°
10. Пределы углов, при которых обеспечивается стабилизация плоскости обзора:
по крену, не менее.......... ±15°
потангажу, не менее......... ±5°
11. Чувствительность приемника....................................не менее 100 дБ/мВт
12. Полоса пропускания............................................... 1,8 - 2,0 МГц
13.Промежуточная частота fnp=fг—fо………………. 30 МГц
14. Масштабы развертки:
0—30 км............................масштабные метки 10 км
0—50 км.......................... масштабные метки 10км
0—125км..........................масштабные метки 25км
0—250 км..........................масштабные метки 50км
200—375км........................масштабные метки 50км
15. Режимы работы......................«Готовность», «Земля», «Метео», «Контур», «Снос»
16. Потребляемая мощность станции:
~115 В 400 Гц......................390 BA
~36 В 400 Гц........................17 BA
= 27 В................................80 Вт
Суммарная масса блоков..............45 кг
РЕЖИМЫ РАБОТЫ РЛС
В соответствии с решаемыми задачами в радиолокаторе предусмотрены четыре рабочих режима: 1. "Земля", 2. "Метео", 3. "Контур", 4. "Снос".
Кроме того, для соблюдения оптимальных условий технической эксплуатации радиолокатора на земле предусмотрен исходный режим "Готовность". Выбор нужного режима (табл. 2.1) осуществляется переключателем режимов, расположенным на передней панели блока индикатора.
РЕЖИМ «ГОТОВНОСТЬ»
Если переключатель установлен в положение «Готовность», то радиолокатор готов к включению. Нажатием клавишного переключателя "РЛС" на пульте управления Гр 4Н станция подключается к сетям электропитания и начинается 4-минутный подготовительный цикл, в течение которого передатчик не работает, так как на модулятор не подается питающее напряжение. Модулятор еще не создает импульсов, питающих магнетрон. Нет и старт-импульсов, запускающих канал развертки и схему синхронизации. Следовательно, канал развертки, схемы формирования масштабных меток и ВУ приемника не работают. Приемный канал также не работает, так как не подается напряжение на коллектор лампы обратной волны (ЛОВ) гетеродина. Антенна подключена к формированию узкой диаграммы направленности, но не сканирует (не качается в азимутальной плоскости). Через 4 мин РЛС полностью готова к работе. Достаточно установить на пульте один из рабочих режимов, как передатчик и все другие устройства начнут функционировать.
Таблица 2.1. Особенности режимов работы PЛC Режим «Земля» В этом режиме осуществляется обзор земной поверхности.
Режим «Земля» предназначен для обзора земли в различных масштабах дальности и различимости объектов. На масштабах 30, 50 и 125 км используется веерная диаграмма направленности (с косеканс-квадратичной диаграммой). На масштабе 250 км диаграммы направленности антенны используются поочередно веерная диаграмма при движении антенны по часовой стрелке и узкая — при обратном движении. Узкая диаграмма дополняет веерную, что увеличивает дальность действия РЛС и улучшает различимость дальних объектов на экране за счет концентрации на них большей мощности. На масштабе 200—375 км объекты, расположенные ближе 200км, на экране не изображаются. Это дает возможность применять только узкую диаграмма направленности. Коэффициент усиления антенны при формировании узкого луча значительно больше, поэтому дальность обнаружения целей увеличивается.
При высоте полета H= 7 км нижний край узкого луча падает на землю на расстоянии 200 км от самолета. Коэффициент усиления антенны при формировании узкого луча значительно больше, чем при формировании веерной диаграммы, поэтому при использовании узкого луча дальность обнаружения целей увеличивается. На масштабе 30 км включается схема временной автоматической регулировки усиления приемника (ВАРУ). Она улучшает качество изображения за счет ослабления сильных сигналов, порождённых действием боковых лепестков диаграммы антенны, то есть она ослабляет влияние боковых лепестков и исключает засветку экрана сильными сигналами, отраженными от близлежащих ориентиров.Благодаря этому яркость центральной части экрана снижается до уровня остального изображения.
Для повышения контрастности изображения схема видеоусилителя видоизменяется так, что изображение на экране становится трехтоновым:
темный тон — сигнал на выходе приемника отсутствует (например, при отражении от гладкой водной поверхности). Экран или совсем не освещен, или освещен очень слабо за счет собственных шумов приемного тракта;
светлый тон — экран освещается за счет слабых сигналов, возникающих при отражении от незастроенных участков местности. На экране появляется фон местности, т. е. экран почти равномерно слегка освещен;
яркий тон — на экране на фоне местности появляются яркие отметки, возникающие при отражении от радиолокационных ориентиров (города, крупные населенные пункты, железнодорожные узлы, отдельные здания, корабли, мосты и т. д.). С помощью регулятора «Контраст» можно выделить только сильные сигналы, а остальные подавить или, наоборот, выделить более слабые сигналы.
Работающий с радиолокатором осуществляет подбор оптимального характера изображения применительно к конкретной обстановке с помощью ручки "КОНТРАСТ".
Все управление радиолокатором при его работе в режиме "ЗЕМЛЯ" производится органами управления, расположенными на основном индикаторном блоке. К ним откосятся:
- переключатель длительностей развертки; - ручка ручного наклона антенны "НАКЛОН"; - ручка "КОНТРАСТ". Необходимость в постоянном использовании каких-либо других органов при работе в указанном режиме отсутствует.
Режим «Метео»
Предназначендля обнаружения различных метеообразований в атмосфере. Кроме того, он используется для определения достаточности превышения высоты полета самолета над горными вершинами, а также обнаружения других самолетов, находящихся на том же эшелоне. В режиме «Метео» на всех масштабах используется узкая диаграмма направленности, которая охватывает по вертикали зоны на расстояниях: 10 км от самолета — 700 м; 30 км от самолета — 2100 м; 50 км от самолета — 3500 м. В режиме "Метео" амплитудная характеристика ВУ линейна и не регулируется, а антенна работает с узкой диаграммой направленности, которая охватывает по вертикали значительные зоны (на расстоянии 10 км от самолета - 500...700 м в зависимости от модификации антенны).
Зоны облачности, находящиеся вблизи от самолета, на экране показываются ближе к центру. На краю экрана изображаются зоны облачности, удаленные от самолета на расстояния, определяемые выбранным масштабом. Чем больше плотность облачности, чем более крупными частицами она образована, тем больше ее коэффициент отражения, тем ярче изображается облачность на экране РЛС. Облачность, не опасная для прохождения самолета, просматривается на экране в виде слегка освещенных зон, на фоне которых распологаются более яркие отметки опасных зон границы которых в режиме "Метео" определить трудно. Таким образом, в режиме "Метео" можно наблюдать общуюметеообстановку на эшелоне полета, а при наклоне антенны вниз или вверх на несколько градусов можно выбрать наиболее безопасный путь для обхода препятствий.
Горные вершины просматриваются на экране в виде ярких отметок, за которыми обычно располагаются тени, возникающие вследствие того, что участки местности, лежащие за вершиной, оказываются экранированными и не облучаются радиоволнами. По мере приближения самолета к горной вершине ее изображение перемещается к центру экрана, размеры отметки уменьшаются и яркость ослабляется. Если превышение самолета над вершиной составляет около 500 м, то, не доходя до первого десятикилометрового кольца дальности, отметка исчезает. Это является признаком безопасности полета. Если же превышение самолета над вершиной недостаточно для безопасного полета, то отметка вершины входит в 10-километровое масштабное кольцо, расположенное вокруг центра экрана, и экипаж обязан предпринять обходной маневр.
Самолеты имеют небольшую эффективную отражающую поверхность (особенно на встречных курсах), поэтому уверенно они обнаруживаются на малых расстояниях, всего 10... 15 км. Чтобы исключить ослабление отметок самолетов и горных вершин под действием импульсов ВАРУ, в режиме "Метео" схема ВАРУ не включается.
Все управление радиолокатором при его работе в режиме «Метео» осуществляется органами управления, расположенными на основном индикаторном блоке:
- переключателем длительностей развертки; - ручкой ручного наклона антенны "НАКЛОН".
Необходимость в использовании каких-либо других органов управления при работе в указанном режиме отсутствует.
Режим "Контур"
Предназначен для выделения грозовой облачности, опасной для прохождения самолета. Возможность выделения опасных зон на общем изображении основана на том, что интенсивность сигнала, отраженного от них, значительно больше, чем интенсивность сигнала, отраженного от неопасной облачности. Используемый метод наблюдения грозовой облачности называется методом контурной индикации. В режиме "Контур" в схеме видеоусилителя сильные сигналы, полученные от опасных зон наблюдаемого пространства, подавляются. В соответствующем месте экрана появляются темные области, контрастно выделяющиеся на светлом фоне, образованном отражениями от неопасных зон. В этом режиме используется только узкая диаграмма направленности, работает схема ВАРУ. Она исключает возможность ошибочной оценки неопасной, но близко расположенной облачности, дающей сильный отраженный сигнал. Ручка регулятора "Контраст" при выделении опасных зон от схемы видеоусилителя отключается.
В режиме "Контур" никаких регулировок не производится.
Режим "Снос"
Позволяет определять угол сноса самолета. Для этого применяется метод наблюдения на экране индикатора локатора яркостных отметок колебаний вторичных доплеровских частот F д//. Такие колебания образуются в результате биений частот доплеровского спектра, получаемого при отражении радиоволн от поверхности значительных размеров - проявления эффекта Доплера при отражении сигнала от земли. Вследствие амплитудной модуляции отраженного сигнала спектром вторичных доплеровских частот на линии развертки получаются яркостные блестки. Особенность метода состоит в том, что вторичные доплеровские колебания имеют частоту, соизмеримую с частотой развертки только при условии совпадения направления излучения антенны с направлением перемещения самолета относительно земли. Метод основан на том, что при совпадении азимутального направления диаграммы антенны с направлением линии фактического пути самолета вторичная доплеровская частота оказывается минимальной и соизмеримой с частотой развертки. Поэтому блестки хорошо наблюдаются на экране.
Если направление антенны не совпадает с направлением вектора путевой скорости самолета, то для случая, показанного на рис. 2.2, земля облучается в пределах дуги абв. Составляющие вектора путевой скорости в направлении этих точек будут различны. Соответственно различными оказываются и доплеровские частоты Fд (a), Fд (б), Fд (в). Между ними возникают биения и детектор выделяет колебания разностной — вторичной доплеровской частоты Fд " (абв). Напряжение этой частоты усиливается и вместе с сигналом изображения вызывает яркостную модуляцию линии развертки. Но частота модуляции вторичными доплеровскими частотами оказывается слишком высокой и глаз их не обнаруживает. Если поворачивать антенну до тех пор, пока диаграмма направленности расположится симметрично относительно вектора путевой скорости, то составляющие путевой скорости (скорости сближения с точками г и е) будут равны. Вторичные доплеровские частоты в этом случае имеют минимальное значение. При этом частота и скорость движения блесток на линии развертки также становятся минимальными. При некотором навыке и достаточно медленном повороте антенны этот момент легко обнаруживается оператором.
Этот момент наблюдается на экране в виде яркостных пульсаций на линии развертки. Малейшее изменение направления излучения (на 0,5 - 1,5°) приводит к их исчезновению. Это объясняется тем, что биения колебаний вторичных доплеровских сигналов оказываются в области частот, при которых яркостная модуляция линии развертки зрительно не воспринимается.
Таким образом, по минимуму вторичных доплеровских частот определяется направление вектора путевой скорости на экране ЭЛТ. Угол, на который для этого пришлось повернуть антенну относительно продольной оси самолета, является углом сноса. Он отсчитывается по азимутальной шкале индикатора, которая в пределах ±20° от нулевого деления проградуирована через каждый градус.
В режиме "Снос" на масштабах 30, 50 и 125 км используется только веерная диаграмма направленности. Это обеспечивает наблюдение яркостных пульсаций по всей линии развертки, а не на отдельном ее участке. В режиме "Снос" антенна останавливается в произвольном положении. Ручное управление поворотом антенны осуществляется при помощи клавишей на пульте управления. Скорость поворота антенны регулируется потенциометром, ось которого связана с ручкой "Контраст". В режиме "Снос" этот потенциометр от схемы видеоусилителя отключается.
Рис.2.2. Определение образования вторичных доплеровских частот
Тех. Описание – Режим работы «ЗЕМЛЯ» При работе радиолокатора в этом режиме в результате соответствующего выбора схемы и параметров отдельных его каналов и блоков обеспечиваетсяполучение на индикаторе в полярных координатах "азимут-дальность" непрерывной радиолокационной карты земной поверхности, расположенной впереди самолета в пределах азимутальных углов ±100° в обе стороны от его оси (с учетом ширины диаграммы направленности).
Потенциальные возможности радиолокатора позволяют производить одновременное наблюдение отражений от незастроенных участков суши (фона земной поверхности) в диапазоне от минимальной дальности, близкой к высоте полета, до максимальной, зависящей от типов антенного и приемопередающего блоков в составе радиолокатора. В этом диапазоне дальностей радиолокатор обеспечивает наблюдение различных водоемов и крупных рек в виде темных провалов в отражениях от фона, а также средних и крупных населенных пунктов в виде более ярких отметок.
При работе станции в режиме "ЗЕМЛЯ" на развертках "30", "50" и "125" обзор земной поверхности осуществляется веерной диаграммой направленности вида с косеканс-квадратичной диаграммой.
Получение такой диаграммы в этом режиме достигается установкой горизонтальной поляризации излучаемых колебаний с помощью соответствующего подмагничивания ферритового вращателя плоскости поляризации, расположенного в облучателе антенны.
При длительности развертки 250 км обзор земной поверхности в целях увеличения дальности наблюдения фона и средних промышленных центров производится поочередно веерной и узкой диаграммами направленности, переключаемыми автоматически путем включения горизонтальной поляризации излучаемых колебаний при движении рефлектора антенны влево и вертикальной - при движении рефлектора вправо. В результате большого послесвечения экрана индикатора радиолокационные изображения от узкого и веерного лучей воспринимаются оператором радиолокационной станции как единое целое. Для обеспечения равноконтрастности этого составного изображения максимумы веерной и узкой диаграмм направленности смещены в вертикальной плоскости относительно друг друга на определенный угол,обеспечиваемый самой конструкцией высокочастотной части антенны.
При работе на развертке "375" обзор земной поверхности осуществляется только узким лучом, так как последний имеет в два раза больший коэффициент направленного действия. При этом,благодаря соответствующему построению высокочастотной части антенны,обеспечивается эффективное перекрытие диаграммой всего индицируемого на экране диапазона дальностей.
Для наилучшего разделения по яркости радиолокационных отражений средних и крупных промышленных центров от фона земной поверхности, а также выравнивания отражений от фона с целью наиболее четкого воспроизведения на индикаторе водных ориентиров в PJIC "Гроза" при ее работе в режиме "ЗЕМЛЯ" применен "трехтоновый" видеоусилитель. Одновременно ступенчатая амплитудная характеристика при необходимости позволяет исключить из радиолокационного изображения отражения от трудно поддающихся опознаванию объектов, таких как складки местности, мелкие населенные пункты и т.д., затрудняющие расшифровку изображения и ориентировку.
Тех. Описание - Режим работы «МЕТЕО»
При работе радиолокатора в этом режиме в результате соответствующего выбора схем и параметров отдельных его каналов и блоков обеспечивается получение на индикаторе в полярных координатах "азимут-дальность" радиолокационного изображения воздушной обстановки пространства, ограниченном азимутальными углами ±1000 относительно оси самолета и углами места ±1,5-20и относительно плоскости горизонта. Для того, чтобы сектор обзора не изменял своего положения в пространстве при кренах и тангаже самолета, что особо важно при обходе грозовых зон, ось диаграммы направленности антенны гиростабилизирована. При необходимости обзора пространства под другими углами места - диаграмма направленности антенны может быть наклонена вручную относительно плоскости горизонта на угол до ±10° при одновременном сохранении работоспособности системы стабилизации, если величина суммы углов крена и тангажа не превышает 10°.
В режиме работы "МЕТЕО" обзор пространства осуществляется радиолокатором с помощью симметричной во всех плоскостях узкой диаграммы направленности, формируемой в антенне при вертикальной поляризации излучаемых колебаний. Благодаря этому исключается при работе в указанном режиме наблюдение мешающих отражений от земной поверхности при всех высотах полета более 1000 м.
Тех. Описание - Режим работы «КОНТУР»
В этом режиме радиолокатор позволяет выявлять внутри отражений от грозовых зон и кучево-дождевой облачности участки, состоящие из капель большого диаметра, характеризующиеся высокой отражающей способностью. Благодаря специальному построению схемы радиолокатора указанные участки представляются на экране индикатора в виде затемненных областей, расположенных в ярких отметках от обнаруженных грозовых зон.
Затемнение областей отметки, соответствующих участка с высокой отражающей способностью, обеспечивается специальной схемой в видеоусилителе, подавляющей все принимаемые сигналы, амплитуда которых превосходит определенный фиксированный уровень». Для предотвращения полного или частичного подавления сигналов от других, более слабых,областей грозовой зоны, вызванного увеличением амплитуды отраженных от них сигналов при уменьшении дальности до них, в режиме "КОНТУР" производится автоматическая временная регулировка усиления приемного устройства. Закон изменения усиления в зависимости от дальности выбран в радиолокаторе таким, что обеспечивает практическое постоянство амплитуды принимаемых от одного и того же объекта сигналов при уменьшении дальности до него от 40-30 до нескольких километров.
В остальном работа радиолокатора в указанном режиме аналогична его работе в режиме "МЕТЕО". Так как возможность оперативного изменения уровня срабатывания системы "КОНТУР" в радиолокаторе отсутствует, в полете не требуется каких-либо дополнительных регулировок по сравнению с теми, которые имеют место в режиме "МЕТЕО".
Тех. Описание - Режим работы «СНОС»
Радиолокатор "Гроза" позволяет производить измерение угла сноса самолета используя амплитудную модуляцию отраженного от земной поверхности сигнала спектром вторичных допплеровских частот. При этом частота модуляции будет минимальной и практически равной нулю в тот момент, когда проекция оси веерной диаграммы направленности антенны совпадет с линией пути самолета.
При измерении угла сноса самолета радиолокатор осуществляет обзор земной поверхности так же, как в режиме "ЗЕМЛЯ". Единственное отличие в том, что управление движением антенны по азимуту выполняется вручную с помощью клавиш, размещенных на лицевой панели основного индикатора слева от экрана. При этом происходит периодическое подключение обмотки управления азимутального электродвигателя к пониженному переменному напряжению той или иной фазы, определяющей направление движения. Так как питание двигателя осуществляется пониженным напряжением, то скорость азимутального движения рефлектора при измерении утла сноса меньше, чем при других режимах. Для удобства управления антенной и получения требуемой точности ее установки в станции предусмотрена возможность плавного изменения скорости с помощью специального регулятора, совмещенного с регулятором "КОНТРАСТ", так как последний при измерении сноса не работает.
Момент совпадения оси диаграммы с линией пути определяется по уменьшению до минимума частоты яркостной модуляции линии развертки, а отсчет угла сноса осуществляется по азимутальной шкале индикатора, имеющей градуировку через два градуса.
Управление радиолокатором в режиме "СНОС" осуществляется органами управления, расположенными на основном индикаторе. К ним относятся:
- переключатель длительностей развертки;
- регулятор наклона антенны "НАКЛОН";
- регулятор "КОНТРАСТ";
- клавиши
|
|||||||||
|
|
Последнее изменение этой страницы: 2020-12-09; просмотров: 545; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.15.244.205 (0.164 с.) |





 , расположенные слева от экрана индикатора.
, расположенные слева от экрана индикатора.



