Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Инерционные системы позиционирования ⇐ ПредыдущаяСтр 9 из 9
Инерциальная навигационная система (ИНС) — обеспечивает непрерывную выработку информации о курсе, координатах, скорости движения и параметрах угловой ориентации платформы, на которой установлена ИНС. Следует отметить такие особенности ИНС, как автономность и отсутствие демаскирующих признаков работы, определяющее широкое её использование на кораблях Военно-Морского Флота. Общие сведения Инерциальная навигационная система (система инерциальной навигации, навигационное устройство), в основу работы которой положены классические (ньютоновские) законы механики. В ИНС исходной (главной) системой отсчёта, по отношению к которой производятся инерциальные измерения, служит инерциальная (абсолютная, т. е. неподвижная относительно звёзд) система. Посредством ИНС определяют координаты, скорость, ускорение и др. основные параметры движения объекта (самолёта, ракеты, космического корабля, надводных и подводных судов и др.). ИНС имеют перед другими навигационными системами большие и важные преимущества — универсальность применения, возможность определения основных параметров движения, автономность действия, абсолютную помехозащищенность. Эти качества определили ИНС как наиболее перспективную навигационную систему.
Принцип действия
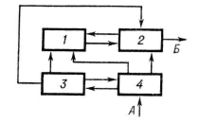
Блок-схема инерциальной навигационной системы: 1 — блок инерциальных измерителей и построителей направлений в пространстве, посредством которого реализуется заданная ориентация измерительных осей и выдаётся измерительная информация в вычислитель; 2 — вычислительный блок, в котором осуществляются интегрирование основного уравнения, вычисление необходимых параметров движения, формирование сигналов управления ориентацией инерциальных измерителей и сигналов компенсации систематических погрешностей; 3 — блок времени, из которого в блоки 1, 2, 4 поступают сигналы мирового времени; 4 — блок ввода начальной информации в блоки 1 и 2 для ориентации инерциальных измерителей и интегрирования основного уравнения; А — поступление начальной информации; Б — выдача конечной информации о параметрах движения. Стрелками показаны направления поступления информации. Принцип действия ИНС состоит в моделировании поступательного движения объекта, характеризуемого изменением во времени ускорения, скорости и координат, подобным процессом движения воспринимающего элемента (массы) пространственного (трёхкомпонентного) акселерометра (в общем случае с компенсацией гравитационного ускорения).
Исходной информацией для инерциальной навигационной системы является ускорение судна, на котором она установлена. Двойное интегрирование вектора ускорения дает необходимую информацию для вычисления скорости и координат. ИНС не связана с внешними источниками информации (курс, скорость). Ориентирование измерительных осей акселерометров по заданным направлениям производится свободными или управляемыми (по сигналам от акселерометров) гироскопическими устройствами (гироскопом, гиростабилизатором, гирорамой и др.) или астростабилизаторами, а также сочетанием этих средств. ИНС весьма сложны и дорогостоящи. Срок службы их меньше, чем у обычных гироскопических приборов. Для правильного функционирования перед стартом объекта требуется ввести начальные данные по координатам пункта старта и скорости, произвести ориентирование инерциальных измерителей. Точность некорректируемых инерциальных навигационных систем зависит от времени. Поэтому возможность получения информации от системы, удовлетворяющей заданным требованиям, ограничена во времени. Так, за час полёта лучшие образцы ИНС имеют погрешность в определении координат примерно 1,5—5 км. Для уменьшения погрешностей и расширения возможностей использования применяют различные способы коррекции от радионавигационных, радиолокационных и астронавигационных средств. XXI век В последнее десятилетие наиболее распространенным типом ИНС стали бесплатформенные инерциальные навигационные системы (БИНС). Они широко применяются в аэрокосмической технике и начали применяться в морских и наземных системах. Это стало возможным после преодоления ряда сложных технических проблем. В ИНС надводных кораблей и судов обычно используются динамически настраиваемые или поплавковые гироскопы. Они обеспечивают выработку навигационных данных и гироскопическую стабилизацию вооружения и различных технических средств корабля. Курс вырабатывается с точностью порядка единиц угловых минут, координаты – с точностью порядка нескольких десятков метров, углы качки – с точностью не хуже 1 угл. мин. В литературе можно встретить совмещенные измерители ИНС / ГАГК (гиро-азимут-горзонт компас) в основе работы которого лежит инерциальный принцип. Согласно протоколам обмена, мы получаем объединенный вектор навигационных параметров этих систем.
Классификация
|
||||||
|
|
Последнее изменение этой страницы: 2020-11-11; просмотров: 166; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.16.147.124 (0.004 с.) |