Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Структурный анализ базовых компоновок
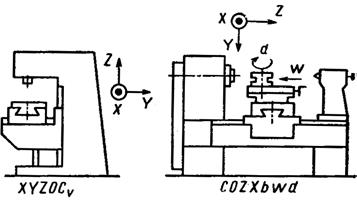
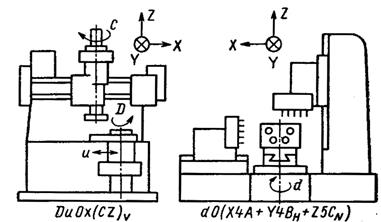
Исходя из заданных движений инструмента относительно обрабатываемой детали, можно рассмотреть всю совокупность возможных базовых компоновок, пользуясь методом Ю.Д. Врагова. Если выбрать прямоугольную систему координат, ориентированную в неподвижном пространстве, то минимальное число подвижных узлов должно соответствовать числу заданных элементарных движений. Обозначим неподвижный узел символом О, а подвижные узлы символами X, Y, Z, если они перемещаются прямолинейно по соответствующим осям координат, и буквами А, В, С – вращательные движения относительно тех же осей. Последовательность расположения узлов станка, которая и определяет его базовую компоновку, тогда можно записать структурной формулой, в которой запись будет начинаться с узла, несущего заготовку, а кончаться узлом, несущим режущий инструмент. На рис. 4.3 приведены компоновки некоторых типов станков общего назначения и соответствующие этим компоновкам формулы условной записи [12].
а) б)
в) г) Рис. 4.3. Типичные компоновки некоторых станков: а – консольно-вертикально-фрезерного; б – токарного; в – зубодолбежного; г – сверлильного агрегатного
Формализация компоновок в виде условной записи имеет то достоинство, что позволяет рассмотреть все возможное множество вариантов компоновок путем формальной перестановки символов в формуле. Все возможные варианты компоновки могут быть сведены в матрицу (рис. 4.4, а). Столбцы матрицы различаются положением неподвижного узла, а строки (попарно) положением вертикально перемещаемого узла. Анализ всего множества компоновок, заключенных в матрице, осуществляют на основе выделения подмножеств, обладающих некоторыми общими признаками. Так, например, варианты последнего столбца приводят к компоновкам с неподвижным изделием, варианты, выделенные из третьего и четвертого столбцов жирной линией (рис. 4.4, а), дают компоновки с подвижной стойкой (рис. 4.5).
Рис. 4.4. Матрицы вариантов компоновок: а – полное множество для формулы XYZO; б – подмножество при отсутствии вертикального перемещения детали; в – подмножество при одном только горизонтальном перемещении детали; г – подмножество при условии примыкания горизонтального перемещаемого узла к неподвижной станине
Рис. 4.5. Варианты компоновок станка с подвижной стойкой Число различных вариантов компоновок возрастает из-за возможности их различного расположения в пространстве. Все 24 варианта базовых компоновок, обусловленных различием в последовательности расположения узлов станка между инструментом и обрабатываемой деталью, могут быть ориентированы в пространстве как горизонтальные или вертикальные. Кроме того, компоновка станка по указанным ранее соображениям отвода стружки и охлаждающей жидкости для изменения теплового баланса может предусматривать различную конструкцию и расположение направляющих (рис. 4.6, а-г и рис. 4.7, а-з).
а) б) в)
г)
Рис. 4.6. Варианты расположения подвижных узлов станка в пространстве
а) б) в) г) д) е)
ж) з) Рис. 4.7. Варианты ориентации направляющих при неизменной исходной
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-11-11; просмотров: 375; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.119.148 (0.005 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 XZOY
XZOY