Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчётно-пояснительная записка к курсовому проектуСодержание книги
Поиск на нашем сайте
Расчётно-пояснительная записка к курсовому проекту Проектирование и исследование механизмов колёсного трактора Синтез, структурный и кинематический анализ механизмов колёсного трактора Исходные данные
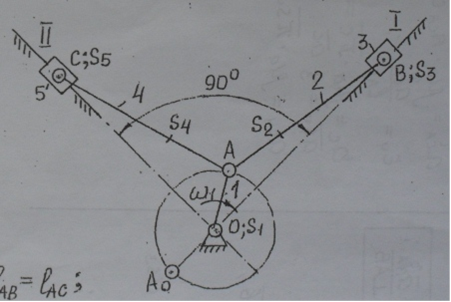
Функциональная схема машинного агрегата показана на рисунке 1.1 Рисунок 1.1
…6- звенья Синтез рычажного механизма двигателя
Натуральная длина кривошипа:
LOA=LOC=0.07 м
Натуральная длина шатуна:
LAB=LCD=LOA*л=0.07*3.4=0.259 м Общая длина:
L=2* LOA+ LAB=0.329 м Структурный анализ механизма
Число подвижных звеньев п = 5. Число кинематических пар V класса (низших) р5 =7. Число кинематических пар четвертого класса (высших) p4 = 0. Степень подвижности механизма находим по формуле Чебышева: W = 3п - 2р5 - p4 = 3 • 5 - 2 • 7 = 1. Построение планов положений механизма
Назначаем масштабный коэффициент длин мL=L/300=0.329/300=0.001096 м/мм. Находим размеры звеньев в выбранном масштабе:
OA=LOA/мL=0.07/0.001096=64 мм AB=LAB/мL=0.259/0.001096=236 мм1=D/мL=0.1/0.001096=91 мм AS2=AB/3=79 мм
Строим 12 наложенных один на другой планов механизма по двенадцати равноотстоящим положениям кривошипа. В качестве нулевого принимаем положение, при котором точка В занимает крайнее левое положение.
1.5 Построение планов скоростей
Скорость точки А находим по формуле:
Масштаб плана скоростей:
Скорость звена ВА:
Угловую скорость находим по формуле:
Скорость точки В находим по формуле:
Длину вектора ускорения точки S2 находим по формуле:
Скорость точки S2находим по формуле:
Расчётные данные представлены в таблице:
Построение годографа скорости
Строим годограф скорости центра масс
1.7 Построение плана ускорений
План ускорения строим для 3положения механизма. Ускорение для точки А находим по уравнению
Определяем масштаб:
Длина вектора
Угловое ускорение звена 2
Ускорение для точки В находим по уравнению:
Угловое ускорение звена 4
Ускорение для точки С находим по уравнению:
Расчётные данные представлены в таблице:
Силовой расчет (кинетостатический) рычажного механизма двигателя Исходные данные
Массы звеньев:
Расчет выполнить для положения 3 (см. лист 1), используя данные приведенные в таблице 1. Построение планов скоростей и ускорений
Строим план механизма для положения 3 в масштабе План скоростей строим в масштабе Методика построения плана изложена в п. 1.5. План ускорений строим по методике, изложенной в п. 1.7. Расчет маховика Исходные данные
Массы звеньев: т1 = 12 кг; т2 = 3,6 кг; m 3 = 3.5 кг. Момент инерции кривошипа
Проектирование маховика
Маховик проектируем в виде тяжелого обода, материал маховика - чугун марки СЧ 15 плотностью Вводим обозначения: D-диаметр маховика, D 1 - внутренний диаметр обода маховика; D 2 - наружный диаметр; b - ширина обода маховика. Определяем размеры и массу маховика:
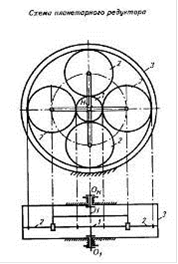
4. Расчет планетарного редуктора Исходные данные
Схема планетарного редуктора показана на рисунке. Передаточное отношение планетарной части редуктора и1 H = 5,6
Условия проектирования
Основные соотношения и условия проектирования перечислены ниже. Формула Виллиса
u1H=1+z3/z1
Условие соосности:
Условие соседства: К < 180/arcsin z2+2/z1+z2 Условие сборки: z1+z2/K=N
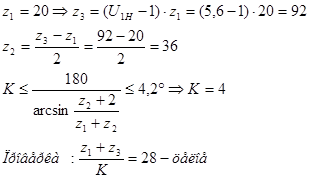
где К - число сателлитов; N - целое число. Подбор чисел зубьев
Возможное число сателлитов определяем из условия:
Приближение
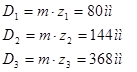
Окончательно принимаем: Находим диаметры делительных окружностей, принимая модуль колес т = 3 мм (ГОСТ 9563-60). Размеры колес:
Вычерчиваем схему редуктора в двух проекциях в масштабе М 1:2.
Список литературы рычажный двигатель кинематический жуковский 1. Лачуга Ю.Ф. и др. «Теория механизмов и машин» 2005 г. 2. Артоболевский И.И. «Теория механизмов и машин» 1988 г. 3. Попов С.А. и др. «Курсовое проектирование по ТМ и ММ» 1998 г. Расчётно-пояснительная записка к курсовому проекту
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-27; просмотров: 85; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.83.78 (0.01 с.) |


 м/с
м/с
 м/с
м/с С-1
С-1 м/с
м/с мм
мм =0,139*100=13,9 м/с
=0,139*100=13,9 м/с 12,1
12,1
 46,7
46,7
 5,4
5,4
 10,3
10,3
 7,1
7,1
 27.4
27.4
 13,6
13,6
 13,4
13,4
 звена 2, перенося с построенных планов скоростей векторы
звена 2, перенося с построенных планов скоростей векторы  в общую точку. Масштаб построения мV=0.139
в общую точку. Масштаб построения мV=0.139  .Соединяем концы векторов плавной лекальной кривой.
.Соединяем концы векторов плавной лекальной кривой. м/с2
м/с2

 в выбранном масштабе:
в выбранном масштабе:  мм.
мм. м/с2
м/с2 мм
мм м/с2
м/с2 с-2
с-2
 мм
мм м/с2
м/с2 м/с2
м/с2 мм
мм м/с2
м/с2 с-2
с-2
 м/с2
м/с2 ;
;  ;
;  . Моменты инерции:
. Моменты инерции:
 .
. Скорость точки А:
Скорость точки А:  .
.
 = 7200 кг/м3.
= 7200 кг/м3.