Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Розробка машинного алгоритму виконання операції та операційного автоматуСодержание книги
Поиск на нашем сайте
Зміст Вступ 1. Розробка машинного алгоритму виконання операції та операційного автомату 1.1 Основні методи виконання операції ділення 1.2 Розробка операційного автомату 1.3 Алгоритм ділення чисел без відновлення остачі 1.4 Приклад виконання операції ділення 2. Синтез керуючого автомату 2.1 Загальні відомості про керуючі автомати 2.2 Розробка карти прошивки ПЗП Висновки Завдання Спроектувати процесор для виконання з використанням доповняльного коду без відновлення розрядів остачі операції ділення в двійково-десятковій системі числення. Синтезувати керуючий автомат побудований на принципі програмованої логіки, використовуючи примусову адресацію для чисел, поданих з плаваючою комою (розрядність мантиси - 1 десятковий розряд, порядку - 2 двійкових розряда). Показати роботу алгоритму на прикладі чисел 47 і 45. Анотація В даній курсовій роботі був розроблений метод операції ділення чисел в двійково-десятковій системі числення та доповняльному коді, з плаваючою комою без відновленя розрядів. Побудовано граф-схему алгоритму виконання заданої операції. Було проведено синтез керуючого автомату, побудованого на принципі програмованої логіки, використовуючи примусову адресацію. Розроблений алгоритм автомату, побудований алгоритм роботи автомату, структурна схема автомату. Вступ
Обчислювальна техніка грає визначальну роль в науковому технічному прогресі нашої держави, яка сприяє підвищенню ефективності виробництва, покрашення якості продукції, росту продуктивності праці. Складність і відповідальність задач, що вирішуються сучасними ЕОМ та системами, потребують від них високої надійності та продуктивності. Тому, однією з основних проблем, які стоять перед розробниками сучасної обчислювальної техніки, є підвищення продуктивності, вітказостійкості та життєздатності [2]. В наш час основним напрямком вирішення цих проблем є побудова обчислювальних машин, які побудовані з великої кількості однорідних модулів, що створюють єдину систему шляхом встановлення логічних зв`язків між ними. В цьому суть концепції мультипроцесорних ЕОМ, частинними випадками яких є матричні, конвеєрні, з програмованою архітектурою і т.д. При цьому висовуються вимоги простоти контрольного обладнання і високої достовірності обробки інформації. Відносно апаратних затрат відмітимо, що тут суттєвіше не надлишковість кода, а додаткові витрати обладнання на реалізацію контроля. В основу проектування операційних пристроїв різного призначення покладено принцип функціонування мікропрограмування і вважати пристрої, як композицію операційного і керуючого автоматів. При цьому мікропрограмування - це спосіб опису функцій операційних пристроїв безвідносно до технічних засобів, які використовуються для їх реалізації. Таке тлумачення мікропрограми дозволяє формулювати синтез структур будь-яких операційних пристроїв незалежно від способу керування роботою пристрою. Необхідно відмітити, що принципи побудови і методи проектування операційних і керуючих автоматів є тою основою, на якій базується теорія і практика проектування більшої частини пристроїв ЕОМ. Розробка машинного алгоритму виконання операції та операційного автомату
Структурна схема операційного автомату наведена додатку А. Таблиця 1.1 Для операційного автомату визначимо: вхідні і вихідні сигнали.
Синтез керуючого автомату
Розробка карти прошивки ПЗП
Використовуючи таблицю 2.1, таблицю 2.2 та граф-схему алгоритму, складемо карту програмування ПЗП керуючого автомату наступним чином: Якщо в даному стані автомата (див. граф-схему алгоритму) виконуються мікрооперації, то записуємо операційну мікрокоманду, якщо виконується умовний або безумовний перехід в заданий стан, то записуємо керуючу мікрокоманду. Операційна мікрокоманда складається з розряду признаку, в який записується "0”, і операційної частини, в яку записується двійковий код виконуваних мікрооперацій згідно таблиці 2.2. Операційна мікрокоманда складається з розряду признаку, в який записується "1”, поля умови, в який записується двійковий код умови переходу згідно таблиці 2.2, і адресної частини, яка містить адресу переходу. Мікропрограма описує послідовність переходу керуючого автомата їз одного стану в наступний стан. В кожному такому стані аналізується вміст окремої мікрокоманди: Якщо розряд признаку Р=0, то виконується мікрооперації, код яких записаний в полі Y і відбувається перехід на наступну мікрокоманду. Якщо розряд признаку Р=1 і умова, код якої записаний в полі Х, справджується (Х=1), то відбувається перехід на мікрокоманду з адресою, вказаною в полі А, інакше відбувається перехід на наступну мікрокоманду.
Таблиця 2.3 - Карта прошивки ПЗП
Функціональну схему керуючого автомату наведено в додатку Г. На схемі позначено: РгМк - регістр мікрокоманд; Р - розряд признаку; ПМ - пам’ять мікрокоманд; ЛС - логічна схема; Ліч - лічильник. Висновки
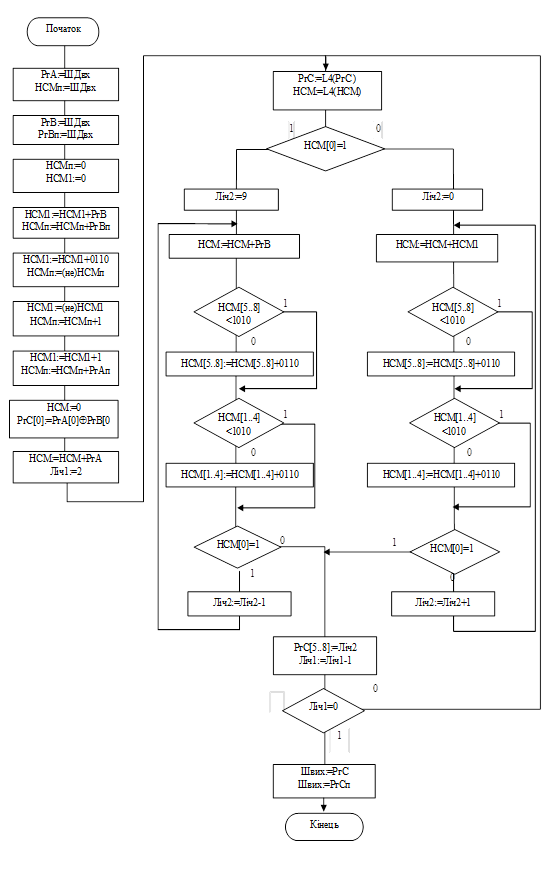
В даній курсовій роботі було розроблено операційний та керуючий автомати і машинний алгоритм виконання операції ділення в оберненому коді без відновлення двох чисел з плаваючою комою в двійково-десятковому коді. Використання алгоритму ділення чисел без відновлення остачі виправдане його швидкодією в порівнянні з алгоритмом ділення чисел з відновленням остачі. А використання операндів з плаваючою комою дозволяє отримати результат достатньої точності. Перелік посилань 1. Журавлев К. С ”Надежность и контроль ЄВМ”. Москва, ”Энергоатомиздат”, 1984. 2. Каган Б. М "Электронные вычислительные машины и системы”. Москва, "Энергоатомиздат ”, 1991. . Лысиков Б. Г "Арифметические и логические основы цифровых автоматов”. Москва, "Высшая школа”, 1985. . Майоров Б. С, Новиков А. Р ”Структура ЭВМ”. Москва, ”Высшая школа”, 1975. . Савельев А. Я "Прикладная теория цифровых автоматов”. Москва, "Высшая школа”, 1987. . Самофалов К. С "Цифровые ЭВМ”. Киев, ”Вища школа”, 1989. Додатки Додаток Б Алгоритм
Зміст Вступ 1. Розробка машинного алгоритму виконання операції та операційного автомату 1.1 Основні методи виконання операції ділення 1.2 Розробка операційного автомату 1.3 Алгоритм ділення чисел без відновлення остачі 1.4 Приклад виконання операції ділення 2. Синтез керуючого автомату 2.1 Загальні відомості про керуючі автомати 2.2 Розробка карти прошивки ПЗП Висновки Завдання Спроектувати процесор для виконання з використанням доповняльного коду без відновлення розрядів остачі операції ділення в двійково-десятковій системі числення. Синтезувати керуючий автомат побудований на принципі програмованої логіки, використовуючи примусову адресацію для чисел, поданих з плаваючою комою (розрядність мантиси - 1 десятковий розряд, порядку - 2 двійкових розряда). Показати роботу алгоритму на прикладі чисел 47 і 45. Анотація В даній курсовій роботі був розроблений метод операції ділення чисел в двійково-десятковій системі числення та доповняльному коді, з плаваючою комою без відновленя розрядів. Побудовано граф-схему алгоритму виконання заданої операції. Було проведено синтез керуючого автомату, побудованого на принципі програмованої логіки, використовуючи примусову адресацію. Розроблений алгоритм автомату, побудований алгоритм роботи автомату, структурна схема автомату. Вступ
Обчислювальна техніка грає визначальну роль в науковому технічному прогресі нашої держави, яка сприяє підвищенню ефективності виробництва, покрашення якості продукції, росту продуктивності праці. Складність і відповідальність задач, що вирішуються сучасними ЕОМ та системами, потребують від них високої надійності та продуктивності. Тому, однією з основних проблем, які стоять перед розробниками сучасної обчислювальної техніки, є підвищення продуктивності, вітказостійкості та життєздатності [2]. В наш час основним напрямком вирішення цих проблем є побудова обчислювальних машин, які побудовані з великої кількості однорідних модулів, що створюють єдину систему шляхом встановлення логічних зв`язків між ними. В цьому суть концепції мультипроцесорних ЕОМ, частинними випадками яких є матричні, конвеєрні, з програмованою архітектурою і т.д. При цьому висовуються вимоги простоти контрольного обладнання і високої достовірності обробки інформації. Відносно апаратних затрат відмітимо, що тут суттєвіше не надлишковість кода, а додаткові витрати обладнання на реалізацію контроля. В основу проектування операційних пристроїв різного призначення покладено принцип функціонування мікропрограмування і вважати пристрої, як композицію операційного і керуючого автоматів. При цьому мікропрограмування - це спосіб опису функцій операційних пристроїв безвідносно до технічних засобів, які використовуються для їх реалізації. Таке тлумачення мікропрограми дозволяє формулювати синтез структур будь-яких операційних пристроїв незалежно від способу керування роботою пристрою. Необхідно відмітити, що принципи побудови і методи проектування операційних і керуючих автоматів є тою основою, на якій базується теорія і практика проектування більшої частини пристроїв ЕОМ. Розробка машинного алгоритму виконання операції та операційного автомату
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-26; просмотров: 162; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.239.70 (0.006 с.) |