
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет задатчика интенсивности скорости ⇐ ПредыдущаяСтр 6 из 6
Задатчик интенсивности скорости необходим для ограничения тока двигателя в переходных процессах. Считаем, что электропривод разгоняется до номинальной скорости, то есть
Коэффициент передачи ЗИС:
На рисунке 2.9 представлена функциональная схема задатчика интенсивности скорости.
Рисунок 2.9 — функциональная схема задатчика интенсивности скорости
Принимаем конденсатор С2 емкостью 2 мкФ. Принимаем: R11 = R12 = 20 кОм; R31 = R32 = 10 кОм.
Выбираем резисторы R11 и R12 марки МЛТ–0.125, сопротивлением 20кОм. Выбираем резисторы R31 и R32 марки МЛТ–0.125, сопротивлением 10 кОм. Выбираем резистор R21 марки МЛТ–0.125, сопротивлением 33 кОм. Выбираем конденсатор СООС марки МБМ, емкостью 2мкФ. Выбираем стабилитрон VD типа КС210Б: напряжение стабилизации — 10 В; Составление структурной схемы системы ТП–Д
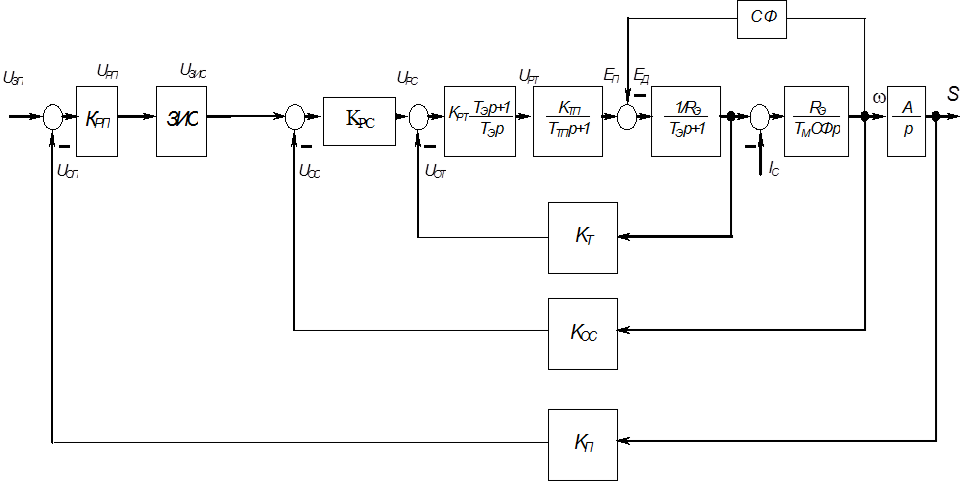
Из структурных схем отдельных регуляторов составляем общую структурную схему системы подчиненного регулирования. На рисунке 3.1 представлена функциональная схема системы подчиненного регулирования. На рисунке 3.2 представлена структурная схема системы подчиненного регулирования.
      Рисунок 3.2 — структурная схема системы подчиненного регулирования Рисунок 3.2 — структурная схема системы подчиненного регулирования
Статический расчет системы подчиненного регулирования
Рисунок 4.1 — структурная схема в динамике

    

Расчет статических характеристик проведем следующим методом. Подставим р = 0, в результате чего получим структуру в статике (см. рисунок 4.2).
 
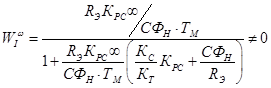
     При условии, что IП = 1.5IH, то передаточная функция будет иметь вид: При условии, что IП = 1.5IH, то передаточная функция будет иметь вид:
Рисунок 4.2 — структурная схема в статике
Коэффициент ошибки:
При условии, что IП = 2.5IH, размыкается обратная связь по скорости, так как регулятор скорости войдет в насыщение, ограничивая рабочий ток. Статическая характеристика изображена на рисунке 4.3.
Рисунок 4.3 Статическая характеристика системы автоматического управления
Расчет переходных процессов можно получить в результате математического моделирования системы. Математическое моделирование системы проводим с использованием пакета прикладных программ Matlab. Структурная схема математической модели приведена на рисунке 5.1. Переходные процессы, полученные в результате математического моделирования системы, приведены на рисунках
Рисунок 5.1 – Схема математической модели.
Перечень ссылок
1. Вибір елементів реверсивних тиристорних перетворювачів електроприводів постійного струму/ В.Т. Пiлецький. – К.: IСДО, 1994. – 148 с. 2. Андреев В.П. И Сабенин Ю.А. Основы электропривода. – М., Госэнергоиздат, 1963, 772 с. 3. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. – М., Энергоиздат, 1981. – 576 с. 4. Зеленов А.Б. Выбор мощности электропривода механизмов прокатных станов. – Киев: УМК ВО, 1990. – 220 с. 5. Соколов Н.Г. Основы конструирования электроприводов. – М., «Энергия», 1971. – 256 с. 6. Справочник по электрическим машинам. Том 2, под редакцией И. П. Копылова, — М., Энергатомиздад, 1989, — 688 с. 7. Справочные данные по электрооборудованию, каталоги и информационные листы в методическом кабинете кафедры АЭМС.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-14; просмотров: 173; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.5.239 (0.01 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 , а пусковой ток IП =1.5 IН, статический ток IC = IН, тогда время разгона:
, а пусковой ток IП =1.5 IН, статический ток IC = IН, тогда время разгона: с.
с.


 Структурная схема в динамике изображена на рисунке 4.1.
Структурная схема в динамике изображена на рисунке 4.1.










 .
.





