
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Передаточные функции цифровых алгоритмовСодержание книги
Поиск на нашем сайте В дискретных системах с программной реализацией алгоритмов управления используются методы цифрового интегрирования. При этом передаточная функция алгоритма управления зависит от метода численного интегрирования и формы экстраполирования. Чаще всего используются методы прямоугольников, трапеций и Симпсона, которые содержат минимальное арифметических операций в алгоритме реализации, а в качестве фиксирующего звена используют фиксатор нулевого порядка. Программную реализацию алгоритмов управления называют дискретной коррекцией. Каждой дискретной передаточной функции соответствует определенный алгоритм и наоборот. Рассмотрим дискретную систему (рис. 9).
Рис. 9
Данную схему можно представить в виде (рис. 10)
Рис. 10
Допустим, задан алгоритм функционирования ЦА (рис. 11)
Рис. 11
xвых[kT] = xвых[kT-T]+xвх[kT-T]. (11)
В соответствии с разностным уравнением, запишем операторное уравнение в форме z – преобразования: xвых(z) = z -1 xвых(z) + z -1xвх(z). (12)
При этом передаточная функция цифрового алгоритма имеет вид:
Алгоритмы цифрового интегрирования
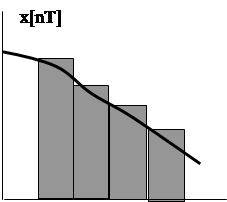
Передаточная функция алгоритма интегрирования по методу прямоугольников зависит от выбранного метода прямоугольной аппроксимации сигнала (рис. 12а, б). В соответствии с рис. 12а, можно записать уравнение
y[kT]=y [kT-T]+x[kT] T, (14)
где y[kT], y [kT-T] – текущее и предыдущее значение интеграла; x[kT] T – приращение. При этом передаточная функция алгоритма имеет вид
В соответствии с рис 12б, можно записать уравнение
y[kT]=y [kT-T]+x [kT-T] T, (16)
где y[kT], y [kT-T] – текущее и предыдущее значение интеграла; x [kT-T] T – приращение. При этом передаточная функция алгоритма имеет вид
Рис. 12 Интегрирование по методу трапеций
При интегрировании по методу трапеций (рис 13) можно записать уравнение y[kT]=y [kT-T]+(x [kT-T]+x[kT]) T/2, (18)
где y[kT], y [kT-T] – текущее и предыдущее значение интеграла; (x [kT-T]+x[kT]) T/2 – приращение.
Применив z – преобразование к уравнению (18), получим выражение для передаточной функции при трапецеидальной аппроксимации входного сигнала.
Литература
1. Бронштейн И.Н., Семендяев К.Н. Справочник по математике для инженеров и учащихся вузов. – М.: Наука, 1986. 2. Дорф Р., Бишоп Р. Автоматика. Современные системы управления. 2002 г. – 832 с. 3. Харазов В.Г. Интегрированные системы управления технологическими процессами: Справочник. Издательство: ПРОФЕССИЯ, ИЗДАТЕЛЬСТВО, 2009. – 550 с. 4. Чебурахин И. Синтез дискретных управляющих систем и математическое моделирование: теория, алгоритмы, программы. Изд-во: НИЦ РХД, ФИЗМАТЛИТ, 2004. – 248c.
|
|||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-14; просмотров: 195; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.006 с.) |
|||||||||||||||||||||||||||||||||||




 (13)
(13) (15)
(15) (17)
(17)

 . (19)
. (19)


