Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
О векторных способах решения задач механики
Векторные треугольники скоростей и перемещений в задачах Кинематика изучает „геометрию” движения - математическое описание движения без анализа причин, его вызывающих. Другими словами, без выяснения вопроса, почему рассматриваемое движение происходит именно так, а не иначе, устанавливается математическое соотношение между его различными характеристиками, такими как перемещение, пройденный путь, скорость, ускорение, время движения. При движении тела (материальной точки) его перемещение можно рассматривать как геометрическую сумму нескольких последовательных перемещений, например,
Соответствующий (2.1 1) многоугольник (треугольник) перемещений представлен на рис.1. Изменение скорости тела
этому выражению соответствует треугольник скоростей (рис.2). Если тело движется с постоянным по величине и направлению ускорением
где
Рисунок 1. Рисунок 2. Рисунок 3.
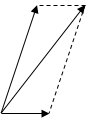
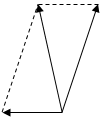
Векторные треугольники перемещений представлены на рис.4 - 6.
Рисунок 4. Рисунок 5. Рисунок 6.
Наиболее эффективно применение векторного способа, основанного на построении векторных треугольников скоростей и перемещений, в тех случаях, когда известны направления векторов ускорения и одной из скоростей (например, начальной). Это относится, в частности, к задачам о движении тепа под действием сипы тяжести. При движении двух тел (материальных точек), зная их перемещения
Разность скоростей теп (относительная скорость) определяется при этом выражением:
соответствующим закону сложения скоростей Галилея:
где
Рисунок 7.
Заметим, что в задачах об одновременном движении двух или нескольких тел целесообразно, как правило, связывать систему отсчета с одним из этих тел и использовать понятия относительных скорости и перемещения.
|
|||||
|
|
Последнее изменение этой страницы: 2019-10-15; просмотров: 217; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.227.69 (0.007 с.) |
 . (2.1 1)
. (2.1 1) ; (2.1 2)
; (2.1 2) , то выражение для скорости в любой момент t времени имеет вид:
, то выражение для скорости в любой момент t времени имеет вид: ; (2.1 3)
; (2.1 3) при t = 0. В общем случае направления векторов начальной скорости
при t = 0. В общем случае направления векторов начальной скорости  и ускорения
и ускорения  могут не совпадать. Треугольник скоростей, соответствующий выражению (2.1 3), приведен на рис.3. Вектор перемещения при этом определяется следующим образом:
могут не совпадать. Треугольник скоростей, соответствующий выражению (2.1 3), приведен на рис.3. Вектор перемещения при этом определяется следующим образом: . (2.1 4)
. (2.1 4)


















 и
и  относительно некоторой системы отсчета, можно вычислить перемещение второго тепа относительно первого:
относительно некоторой системы отсчета, можно вычислить перемещение второго тепа относительно первого: . (2.1 5)
. (2.1 5) , (2.1 6)
, (2.1 6) , (2.1 7)
, (2.1 7) и v2 - скорости первого и второго теп в неподвижной системе отсчета ("неподвижность" системы относительна),
и v2 - скорости первого и второго теп в неподвижной системе отсчета ("неподвижность" системы относительна),  - скорость второго тела относительно первого. Векторные треугольник и параллелограммы скоростей, соответствующие формулам (2.1 6) и (2.1 7), представлены на рисунке 7.
- скорость второго тела относительно первого. Векторные треугольник и параллелограммы скоростей, соответствующие формулам (2.1 6) и (2.1 7), представлены на рисунке 7.