
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Описание исследуемой системы и её характеристики.Содержание книги
Поиск на нашем сайте
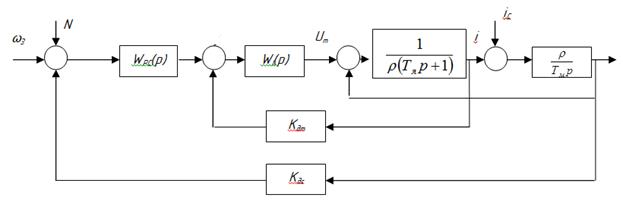
В данном курсовом проекте необходимо провести исследование автоматизированного электропривода постоянного тока, функциональная схема которого (рисунок 3) включает два контура регулирования: внутренний – контур регулирования тока и внешний – контур регулирования скорости. Регулятор тока в соответствии с алгоритмом его функционирования формирует диаграмму изменения тока якорной цепи двигателя. В контур регулирования тока входят регулятор тока (РТ), тиристорный преобразователь (ТП), звено, учитывающее электромагнитную инерцию двигателя постоянного тока (Д1), и датчик тока (ДТ). На входе регулятора тока происходит сравнение сигнала задания тока i3 с выхода регулятора скорости с сигналом, пропорциональным фактическому току двигателя i с выхода датчика.
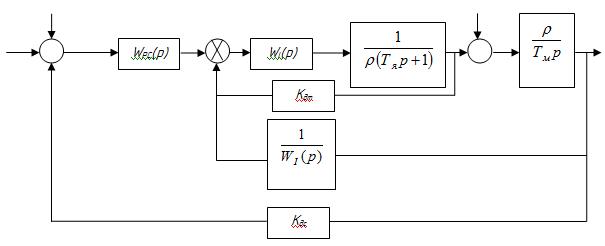
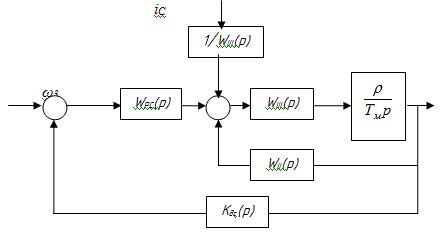
В контур регулирования скорости входят регулятор скорости (РС), замкнутый контур регулирования тока, звено, учитывающее механическую инерцию двигателя постоянного тока (Д2), и датчик скорости. Сигнал задания для системы в целом формируется задатчиком интенсивности На основании функциональной схемы электропривода составили структурную схему системы (рисунок 4), которая является основной исходной расчетной схемой.
Для произведения расчетов имеются следующие параметры: ТЯ = 0,04 - электромагнитная постоянная времени электропривода (с); ТМ = 0,076 -электромеханическая постоянная времени электропривода (с); ρ = 0,076 -сопротивление якорной цепи; ТП = 0,01 -постоянная времени преобразователя; КДТ = 0,03 -коэффициент передачи датчика тока; КДС = 1 -коэффициент передачи датчика скорости; КП =2,4 -коэффициент передачи тиристорного преобразователя энергии. 2.2 Синтез системы и определение передаточных функций 2.2.1 Преобразование структурной схемы. Преобразуем структурную схему (рисунок 4) к стандартному виду, когда все звенья сосредоточены в прямом канале системы, внутренние обратные связи отсутствуют, возмущающее воздействие приложено к выходу системы, а главная обратная связь является единичной.
(2.1)
Рисунок 5. Преобразованная функциональная схема. Затем перенесем сумматор и получим звено с обратной связью:
(2.2)
Рисунок 6. Стандартный вид.
(2.3)
Рисунок 7. Преобразованная схема. Затем перенесем сумматор и получим следующую схему:
Рисунок 8. Схема с перенесенным сумматором.
Затем опять воспользовавшись правилом обратной связи:
( (2.4)
Рисунок 9. Конечный вид.
Перенеся узел суммирования на выход системы, окончательно получим схему, по которой можно непосредственно записать все требуемые передаточные функции:
Рисунок 10. Итоговая Схема. Синтез системы. Синтез системы автоматического управления является основной стадией проектирования, сущность которой заключается в таком выборе структуры системы, ее параметров и технической реализации, при котором обеспечиваются требуемые показатели качества регулирования.
WРС= КРС КРС=24
|
||||||||
|
|
Последнее изменение этой страницы: 2017-02-19; просмотров: 260; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.27.154 (0.007 с.) |

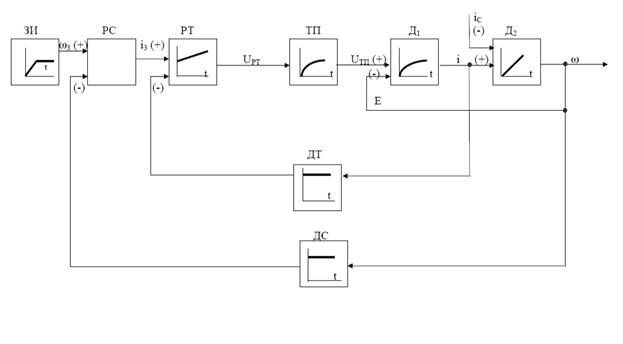 Рисунок 3. Функциональная схема САУ.
Рисунок 3. Функциональная схема САУ. (ЗИ), обеспечивающим необходимый темп изменения скорости и её установившееся значение. В остальном принцип функционирования контура скорости аналогичен контуру тока. При необходимости ограничение значений координат электропривода i и UТП может осуществляться нелинейными обратными связями, охватывающими соответствующие регуляторы.
(ЗИ), обеспечивающим необходимый темп изменения скорости и её установившееся значение. В остальном принцип функционирования контура скорости аналогичен контуру тока. При необходимости ограничение значений координат электропривода i и UТП может осуществляться нелинейными обратными связями, охватывающими соответствующие регуляторы. Рисунок 4. Структурная схема САУ.
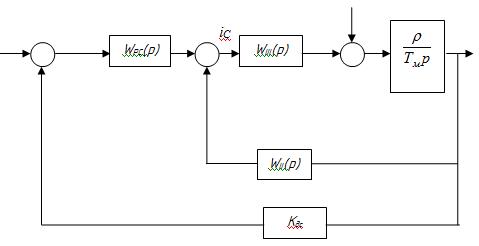
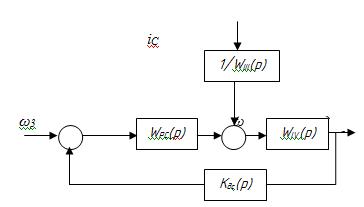
Рисунок 4. Структурная схема САУ. Используя правило последовательного соединения элементов заменим регулятор тока и тиристорный преобразователь эквивалентным звеном:
Используя правило последовательного соединения элементов заменим регулятор тока и тиристорный преобразователь эквивалентным звеном:

 Используя правило обратной связи преобразуем схему следующим образом:
Используя правило обратной связи преобразуем схему следующим образом:

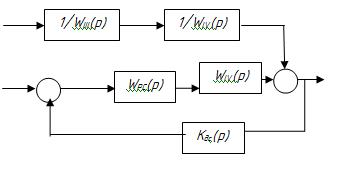
 В нашем случае корректирующим устройством является усилительное звеном КРС. Коэффициент усиления этого звена равен порядковому номеру студента:
В нашем случае корректирующим устройством является усилительное звеном КРС. Коэффициент усиления этого звена равен порядковому номеру студента:


