
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Структурный анализ кривошипно-ползунного механизмаСодержание книги
Похожие статьи вашей тематики
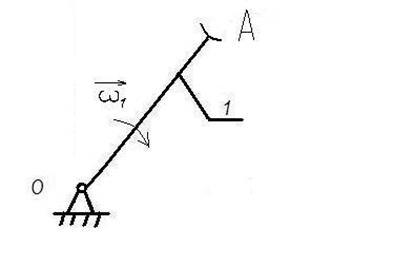
Поиск на нашем сайте 1.Изобразим структурную схему механизма Звено 1- кривошип – совершает вращательное движение; Звено 2 –шатун – совершает поступательное движение; Звено3- ползун – совершает поступательное движение. О, А, В, В' – кинематические пары.
Рис. 1. Кривошипно-ползунный механизм:
2. Найдём степень подвижности механизма по формуле Чебышева:
W = 3n — 2p5 — 1p4,
где n - число подвижных звеньев; p5 - число кинематических пар 5-ого класса; p4 — число кинематических пар 4-ого класса; 3.Разложим механизм на структурные группы Ассура и входное (ведущее) звено
W = 3n — 2p5 = 3 · 2 — 2 · 3 = 0
Рис. 2. Структурная группа второго класса второго порядка.
W = 3n — 2p5 = 3 · 1 — 2 · 1 = 1
Рис. 3. Механизм первого класса (входное звено).
4.Запишем структурную формулу механизма 1 → 222 5.Определим класс, порядок всего механизма. Исследуемый механизм состоит из механизма первого класса и структурной группы (шатун и ползун), второго класса второго порядка, следовательно, механизм О, А, В, В' - механизм второго класса второго порядка. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА Исходные данные: При кинематическом анализе решаются три задачи: - задача о положениях; - задача о скоростях; - задача об ускорениях.
Задача о положениях
Проектирование кривошипно-ползунного механизма. Найдем крайние положения механизма: начало и конец рабочего хода выходного звена. Начало рабочего хода найдем по формуле: S'= где
Конец рабочего хода выходного звена найдем по формуле: S"= Рабочий ход S=S' - S"=2r=0,04·2=0,08 [м]. Построим механизм в масштабе m где ОА – длина звена на чертеже, m Найдем длину звена АВ на чертеже АВ = Покажем перемещение точек в двенадцати положениях механизма. Для этого разделим окружность на 12 равных частей, используя метод засечек. Определим положения звеньев механизма. Построим шатунную кривую. Для этого найдем центр тяжести каждого звена и соединим плавной линией. Планы положений механизма используются для определения скоростей и ускорений в заданных положениях. Задача о скоростях
Кинематический анализ выполняется графоаналитическим методом, который отражает наглядность изменения скоростей и обеспечивает достаточную точность. Скорость ведущего звена:
Запишем векторные уравнения: VB = VA+VВА; VB = VВ+VBВ0, где VВ0 = 0; VA ^ OA; VВА ^ AB; VB = VBВ0 || оси движения выходного звена. Величины векторов VBA, VB, VS2 определим построением. Выберем масштабный коэффициент плана скоростей:
где pa - отрезок, характеризующий величину скорости на чертеже (мм). От произвольной точки р - полюса плана скоростей отложим вектор ра, перпендикулярный ОA. Через т. «а» проводим перпендикулярно звену АВ вектор АВ. Точка пересечения оси (выбранной в направлений движения) с этим вектором даст т. «в», соединив т. «в» с полюсом получим вектор скорости т. «в». Определим величину скорости т. «в»:
Положение т. S2 на плане скоростей определим из пропорции:
Соединив т. S2 с полюсом р, получим величину и направление скорости т. S2:
Определяем:
Определяем:
Направление w2 определяется переносом вектора vba в т.В относительно т.А.
Годограф скоростей Годограф скоростей - это геометрическое место векторов скорости t.S2, в двенадцати положениях механизма приведем к одной точке и соединим их вершины плавной линией вектора скоростей центра масс звена.
Задача об ускорениях
Исследование механизма начинаем со входного звена, определяем ускорение точки А:
Определяем масштабный коэффициент плана ускорений
где p1a – вектор, характеризующий величину ускорения аA на плане ускорений. Переходим к исследованию группы 222. Запишем векторные уравнения: где aА – ускорение входного звена; аnВА- нормальная составляющая относительного ускорения звена АВ, вектор этого ускорения на плане ускорений направлен параллельно звену АВ, к точке В.
аtВА – тангенциальная составляющая относительного ускорения звена АВ, вектор этого ускорения направлен перпендикулярно звену АВ. Построим план ускорений. Из произвольной точки P1 - полюса откладываем вектора скоростей aа и anBA. Из конца вектора аnBA проводим вектор аτBA перпендикулярный предыдущему вектору, до пересечения с осью движения звена, совершающего поступательное движение, по которой направлен вектор ускорения ав. Определим ускорение aAB, соединив на плане ускорений точку а с точкой b. Вектора ускорений центров масс звеньев определяем используя теорему подобия. Определим величины ускорений, замерив вектора на плане ускорений:
Определим угловое ускорение звена АВ, ε2 =
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-10; просмотров: 885; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.41 (0.01 с.) |



 OA= 0,04 м,
OA= 0,04 м,  AB= 0,18 м,w1 = 75 с-1.
AB= 0,18 м,w1 = 75 с-1. = 0,04+0,18 = 0,22
= 0,04+0,18 = 0,22 - длина кривошипа ОА
- длина кривошипа ОА - длина шатуна АВ
- длина шатуна АВ = 0,18-0,04 = 0,14
= 0,18-0,04 = 0,14 =
=  = 0,001 [м/мм],
= 0,001 [м/мм], =180 [мм].
=180 [мм]. = 75·0,04 = 3 [мс-1].
= 75·0,04 = 3 [мс-1]. =
=  = 0,05 [мс-1/мм],
= 0,05 [мс-1/мм], = 40·0,05 = 2 [мс-1].
= 40·0,05 = 2 [мс-1].
 = 45·0,05 = 2,25 [мс-1]
= 45·0,05 = 2,25 [мс-1] = 50·0,05 = 2,5 [мс-1]
= 50·0,05 = 2,5 [мс-1] = 30·0,05 = 1,5 [мс-1]
= 30·0,05 = 1,5 [мс-1] = 40·0,05 = 2 [мс-1]
= 40·0,05 = 2 [мс-1] =
=  13,9 [с-1]
13,9 [с-1]

 , т.к.
, т.к. 

 = 752 ·0,04 = 225 мс-2.
= 752 ·0,04 = 225 мс-2. =
=  = 3,75
= 3,75  ,
,
 =
=  = 34 мс-2,
= 34 мс-2, = 30·3,75 = 112,5 [мс-2]
= 30·3,75 = 112,5 [мс-2] = 30·3,75 = 112,5 [мс-2]
= 30·3,75 = 112,5 [мс-2] = 60·3,75 = 225 [мс-2]
= 60·3,75 = 225 [мс-2] = 30·3,75 = 112,5 [мс-2]
= 30·3,75 = 112,5 [мс-2] = 58·3,75 = 217,5 [мс-2]
= 58·3,75 = 217,5 [мс-2] = 58·3,75 = 217,5 [мс-2]
= 58·3,75 = 217,5 [мс-2] 625 с-1
625 с-1 , мс-2
, мс-2
 , мс-2
, мс-2



