
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Назначение и области применения микропроцессорных устройств.Содержание книги
Поиск на нашем сайте
Назначение и области применения микропроцессорных устройств. Характерные особенности микропроцессорных информационно-управляющих систем, предназначенных для автоматизации технологических процессов: 1. наличие ограниченного набора четко сформулированных задач; 2. требования оптимизации структуры системы для конкретного применения; 3. работа в реальном масштабе времени, т.е. обеспечение минимального времени реакции на изменение внешних условий; 4. наличие развитой системы внешних устройств, их большое разнообразие; 5. существенное различие функциональных задач; 6. высокие требования по надежности с учетом большой продолжительности непрерывной работы; 7. сложные условия эксплуатации; 8. обеспечение автоматического режима работы или режима с участием оператора как элемента системы.
Представление информации в микропроцессорных системах. Непрерывные и дискретные сообщения. Использование аналоговых и дискретных сигналов. Последовательный и параллельный способ представления информации. Любой процесс функционирования технического объекта или системы связан с передачей, приемом и переработкой информации. Информация — совокупность фактов, явлений, событий, представляющих интерес, подлежащих регистрации и обработке. Информация, представленная в виде, удобном для обработки, называется данными. Информация, вложенная и зафиксированная в некоторой материальной форме, называется сообщением. Сообщения делятся на: непрерывные (аналоговые); дискретные (цифровые). Непрерывные сообщения могут принимать любые значения и изменяться в произвольные моменты времени. Данные сообщения естественным образом передают речь, музыку и изображения. Основным примером непрерывного сообщения является аналоговый сигнал, это сигнал, величина которого непрерывно изменяется во времени. Аналоговый сигнал обеспечивает передачу данных путем непрерывного изменения во времени амплитуды, частоты либо фазы. В соответствии с этим, он имеет бесконечное число значений. К аналоговым относятся и шумо-подобные сигналы. Под дискретными сообщениями понимаются сообщения, параметры которых могут принимать лишь некоторое конечное число значений в определенном диапазоне. Основным примером дискретного сообщения является логический (цифровой) сигнал (1/0) или (+/-). Использование аналоговых и дискретных сигналов. Для обработки аналоговых сигналов необходимо с требуемой степенью точности заменять непрерывные сообщения на цифровые путем квантования непрерывного сообщения по уровню и времени. Другими словами необходимо определить для сигналов максимальные границы по уровню (по величине) сигнала. Затем необходимо провести дискретизацию по времени. Прямой, Обратный, Дополнительный код ПК-получается при непосредственном преобразовании числа в двоичную систему счисления. Для кодировки знака числа используется самый старший разряд кода: «+»-0, «-«-1 ОК- существует только для отрицательных чисел. Получается путём инверсии всех значащих разрядов числа. ДК-для представления отрицательных чисел, получается из ОК +1 младшего разряда числа N. 1) Алгебраическое сложение с использованием ДК Х1-х2=х1+(-х2)=ПК(х1)+ДК(-х2) При алгебраическом сложении в ДК образующаяся единица циклического переноса, ведущая к переполнению разрядной сетки отбрасывается. 2) Алгебраическое сложение с использование ОК. Х1-х2=х1+(-х2)=ПК(х1)+ОК(-х2) При алгебраическом сложении в обратном коде возникает единица циклического переноса, ведущая к переполнению разрядной сетки. Она прибавляется к младшему разряду результата
Разрядность сетки ЭВМ Разрядная сетка-общепринятый формат двоичного слова для любого типа ЭВМ. Число с плавающей запятой в общем виде выглядит следующим образом. Формат 32-разрядной сетки выглядит следующим образом:
1-«-» 0-«+». Пример: -279,25=-(1*28+0*27+0*26 +0*25+1*24 +0*23+1*22+1*21 + 1*20) = -100010111,012=-427,28=-117,416
Нормализация числа-приведение числа к виду, в котором в мантиссе после запятой всегда стоит 1. -100010111,01*20=-0,10001011101*29. р=92+00001001. р*=р+2N. р*=00001001+10000000=10001001(столбец)
Типы микросхем ОЗУ Существует два типа микросхем ОЗУ: - статические ОЗУ, в которых основой запоминающей ячейки служит триггер; - динамические ОЗУ, в них основой запоминающих ячеек является конденсатор; в качестве конденсатора используется затвор полевого транзистора. Ячейка динамического ОЗУ проще, поэтому ОЗУ этого типа дешевле и имеют большую емкость при том же количестве компонентов, однако они требуют периодической подзарядки всех запоминающих конденсаторов. Этот процесс называется регенерацией. Типичное значение периода регенерации — миллисекунды; регенерация осуществляется при каждой операции чтения или записи. Также в динамических ОЗУ используется мультиплексированная адресная шина — адрес передается за два цикла, сначала одна половина разрядов (строки), потом другая (столбцы), для регенерации достаточно перебрать все номера строк. Основными направлениями совершенствования ОЗУ является разработка: - квазистатических ОЗУ — динамических «внутри», но со встроенной автономной схемой регенерации; - энергонезависимых ОЗУ, хотя бы и в течение ограниченного периода времени. Одним из путей решения этой проблемы является использование микромощных статических ОЗУ со встроенным источником электропитания. 12) Память в микропроцессорных устройствах: Буферная память, стековая, кэш-память. Буферная память В вычислительных системах используются подсистемы с различным быстродействием и, в частности, с различной скоростью передачи данных (рис. 1). Обычно обмен данными между такими подсистемами реализуется с использованием прерываний или канала прямого доступа к памяти. В первую очередь подсистема 1 формирует запрос на обслуживание по мере готовности данных к обмену. Однако обслуживание прерываний связано с непроизводительными потерями времени и при пакетном обмене производительность подсистемы 2 заметно уменьшается. При обмене данными с использованием канала прямого доступа к памяти подсистема 1 передает данные в память подсистемы 2. Данный способ обмена достаточно эффективен с точки зрения быстродействия, но для его реализации необходим довольно сложный контроллер прямого доступа к памяти. Стековая память. Стековой называют память, доступ к которой организован по принципу: «последним записан — первым считан» (Last Input First Output — LIFO). Использование принципа доступа к памяти на основе механизма LIFO началось с больших ЭВМ. Применение стековой памяти оказалось очень эффективным при построении компилирующих и интерпретирующих программ, при вычислении арифметических выражений с использованием польской инверсной записи. В микропроцессорах она стала широко использоваться в связи с удобствами реализации процедур вызова подпрограмм и при обработке прерываний. Аппаратный стек представляет собой совокупность регистров, связи между которыми организованы таким образом, что при записи и считывании данных содержимое стека автоматически сдвигается. Основное достоинство аппаратного стека — высокое быстродействие, а недостаток — ограниченная емкость. Наиболее распространенным в настоящее время и, возможно, лучшим вариантом организации стека в ЭВМ является использование области памяти. Для адресации стека используется указатель стека, который предварительно загружается в регистр и определяет адрес последней занятой ячейки. В некоторых МП содержимое основных регистров запоминается в стеке автоматически при прерывании программ. Кэш-память Для ускорения доступа к оперативной памяти используется специальная сверхбыстродействующая кэш-память, которая располагается как бы «между» микропроцессором и оперативной памятью, в ней хранятся копии наиболее часто используемых участков оперативной памяти. Регистры кэш-памяти недоступны для пользователя. В кэш-памяти хранятся данные, которые микропроцессор получил и будет использовать в ближайшие такты своей работы. Быстрый доступ к этим данным позволяет сократить время выполнения очередных команд программы. Микропроцессоры, начиная от МП 80486, имеют свою встроенную кэш-память. Микропроцессоры Pentium и Реntium Pro имеют кэш-память отдельно для данных и отдельно для команд. Для всех микропроцессоров может использоваться дополнительная кэш-память, размещаемая на материнской плате вне микропроцессора, емкость которой может достигать нескольких Мбайт.
13) Периферийные устройства в микропроцессорных устройствах. Аналога -цифровые преобразователи. Основные типы АЦП. Параметры АЦП. Статические параметры АЦП, динамические параметры АЦП. Отличительные характеристики АЦП с различной архитектурой (в виде графика). Статические параметры - Разрешающая способность— величина, обратная максимальному числу кодовых комбинаций на выходе АЦП. Разрешающая способность выражается в процентах, разрядах или децибелах. Например, 12-разрядный АЦП имеет разрешающую способность 1/4096, или 0,0245% от полной шкалы, или -72,2 дБ. Разрешающей способности соответствует шаг квантования, номинальное значение шага квантования h=Uпш/(2N-1), где Uпш номинальное максимальное входное напряжение АЦП (опорное напряжение), соответствующее максимальному значению выходного кода, N — разрядность АЦП. - Погрешность полной шкалы—относительная разность между реальным и идеальным значениями предела шкалы преобразования при отсутствии смещения нуля. - Погрешность смещения нуля— значение выходного кода, когда входной сигнал АЦП равен нулю. Является аддитивной составляющей полной погрешности. - Нелинейность— максимальное отклонение реальной характеристики преобразования D(Uвх) от оптимальной(линия 2 на рис. 24). Оптимальная характеристика находится эмпирически так, чтобы минимизировать значение погрешности нелинейности. - Монотонность характеристики преобразования — это неизменность знака приращения выходного кода D при монотонном изменении входного преобразуемого сигнала. - Температурная нестабильностьАЦ преобразователя характеризуется температурными коэффициентами погрешностиполной шкалы и погрешности смещения нуля. Динамические параметры Возникновение динамических погрешностей связано с дискретизацией сигналов, изменяющихся во времени. - Максимальная частота дискретизации (преобразования)— это наибольшая частота, с которой происходит образование выборочных значений сигнала, при которой выбранный параметр АЦП не выходит за заданные пределы. Измеряется числом выборок в секунду. Выбранным параметром может быть, например, монотонность характеристики преобразования или погрешность линейности. - Время преобразования (tпр)— это время, отсчитываемое от начала импульса дискретизации или начала преобразования до появления на выходе устойчивого кода, соответствующего данной выборке. -Время выборки (стробирования) — время, в течение которого происходит образование одного выборочного значения. При работе без УВХ равно времени преобразования АЦП.
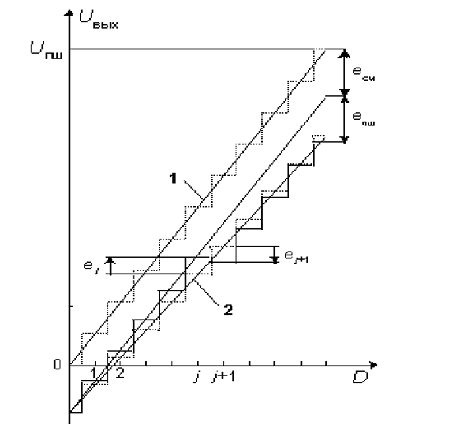
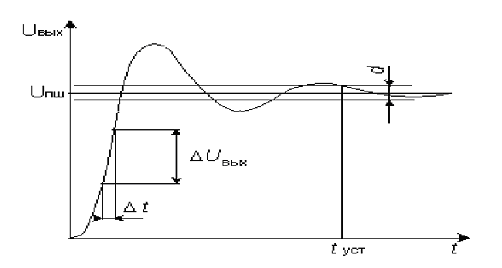
14) Цифро-аналоговые преобразователи. Основные типы ЦАП. Параметры ЦАП. Статическая характеристика преобразования ЦАП (в виде графика). Интерфейс данных ЦАП. Опорное напряжение. Чтобы управлять клапаном гидроусилителя, катушкой громкоговорителя или аналогичными изделиями от цифрового вычислителя используют цифро-аналоговые преобразователи. При выборе ЦАП необходимо определить разрядность прибора N, где 2n — эквивалентно максимальному значению аналогового выходного сигнала. Наименьшее значение аналогового сигнала соответствует одной дискрете и получается при подаче на вход ЦАП,а логической единицы только первого младшего значащего разряда (МЗР или LSB). Основные типы ЦАП: 1. взвешивающие— с суммированием взвешенных токов или напряжений, когда каждый разряд входного слова вносит соответствующий своему двоичному весу вклад в общую величину получаемого аналогового сигнала; такие ЦАП называют также параллельными или многоразрядными (multibit). 2. Sigma-Delta, по принципу действия обратные АЦП этого же типа. Входной цифровой сигнал подвергается значительной (64x и более) передискретизации и подается на модулятор, формирующий малоразрядные (обычно однобитовые) значения. Полученные в результате малоразрядные отсчеты управляют схемой выдачи эталонных зарядов, которые со столь же высокой частотой добавляются к выходному сигналу. 3. выдающихе истинно одноразрядный поток, называют bitstream(поток битов) илиPDM(PulseDensityModulation— модуляция плотностью импульсов). 4. Широтно-импульсная модуляция (ШИМ, Pulse Width Modulation, PWM),когда на схему выборки-хранения аналогового сигнала выдаются импульсы постоянной амплитуды и переменной длительности, управляя дозированием выдаваемого на выход заряда. Параметры ЦАП. При последовательном возрастании значений входного цифрового сигнала D(t) от 0 до 2N-1 через единицу младшего разряда (ЕМР) выходной сигнал Uвых(t) образует ступенчатую кривую. Такую зависимость называют обычно характеристикой преобразования ЦАП. В отсутствие аппаратных погрешностей средние точки ступенек расположены на идеальной прямой 1 рис., которой соответствует идеальная характеристика преобразования. Реальная характеристика преобразования может существенно отличаться от идеальной размерами и формой ступенек, а также расположением на плоскости координат. Большинство параметров аналогично рассмотренным выше параметрам для АЦП, ниже рассмотрены специфические: Динамические параметры ЦАП определяются по изменению выходного сигнала при скачкообразном изменении входного кода, обычно от величины "все нули" до "все единицы" рис. 2.
Время установления — интервал времени от момента изменения входного кода (на рис. 3 t=0) до момента, когда в последний раз выполня-ется равенство | U вых- U пш|= d /2, Скорость нарастания — максимальная скорость изменения Uвых(t) во время переходного процесса. Определяется как отношение приращения Uвых ко времени, за которое произошло это приращение. Обычно указывается в технических характеристиках ЦАП с выходным сигналом ввиде напряжения. У ЦАП с токовым выходом этот параметр в большой степени зависит от типа выходного ОУ.Для перемножающих ЦАП с выходом в виде напряжения часто указываются частота единичного усиления и мощностная полоса пропускания, которые в основном определяются свойствами выходного усилителя. Интерфейс данных. Раньше данные в ЦАП поступали в параллельном коде. Преимущество здесь ясно видно — быстрая передача данных и простой протокол связи. Но минимизация радиоаппаратуры требует уменьшения размеров корпуса микросхемы. Это достигается за счет передачи последовательного кода данных. Протокол последовательного периферийного интерфейса (SPI) и микросхемы, с ним связанные, сегодня имеют уже большую долю рынка ЦАП и поэтому многие из них работают с двухпроводным I2С-совместимым интерфейсом. Часто требуется гальваническая развязка линии данных. Наиболее просто это осуществляется с помощью оптронных приборов при последовательном интерфейсе. Так, новые 12ти-разрядные ЦАПы типа MAX5539 и MAX5543 имеют встроенную развязку, что позволяет получить аналоговый выход не связанный гальванически с входом. Опорное напряжение (Von) Характеристики ЦАП в большей степени определяются источником опорного напряжения, который может быть встроен в корпус преобразователя или применяться как внешний элемент. Если на выходе аналоговый сигнал не усиливается, то максимальный входной код соответствует Von. Опорное напряжение также определяет напряжение шага, то есть изменение выхода в ответ на 1 переход младшего значащего разряда на входе. Один шаг равен Von/2n, где N — разрядность ЦАПа. Если при постоянной температуре опорное напряжение определяется своей начальной точностью, то при изменении температуры дрейф Von имеет непосредственное влияние на качество ЦАПа. При подключении внешнего источника опорного напряжения (ИОН) нужно учитывать не только ток и напряжение, которые требуются ЦАП, но и те динамические эффекты, которые происходят во внутренней структуре преобразователя. Изменение входного кода вызывает изменение сопротивления нагрузки ИОН. Поэтому надо выбирать такой источник опорного напряжения, который мог бы поддерживать выходной ток и напряжение при каждом шаге изменения нагрузки в пределах требуемого времени преобразования ЦАП. Часто для этих целей используют конденсатор или буферный операционный усилитель.
15) Системный расчет АЦП: краткие сведения о6 АЦП, исходные предпосылки для расчета (выбора). АЦП (округление (квантование), виды погрешностей, среднеквадратичная погрешность (СКП) квантования по уровню, СКП квантования по времени, многоканальный режим АЦП), предварительный расчет АЦП. порядок предварительного расчета АЦП. Принцип работы АЦП состоит в измерении уровня входного сигнала и выдаче результата в цифровой форме. Основные типы АЦП: параллельные, последовательного приближения, с измерением временных интервалов, последовательного счета, или однократного интегрирования, двойного интегрирования, следящие. Статические параметры: Разрешающая способность, Погрешность полной шкалы, Погрешность смещения нуля, Нелинейность, Монотонность характеристики преобразования, Температурная нестабильность. Динамические параметры: Максимальная частота дискретизации, Время преобразования (tпр), Время выборки (стробирования). Дискретный сигнал фиксируется на небольшом конечном интервале времени, а его амплитуда может принимать определенное конечное число значений. Поэтому переход от непрерывного сигнала к дискретному приводит к его округлению. Что приводит к ошибкам двух видов: 1) От квантования по уровню 2) От квантования во времени Квантование по уровню- замена точного значения величины сигнала приближенным дискретным значением, при котором 2 ближайших разреш. дискретных значения различаются на элемент. величину. Квантование во времени-замена непрерывного во времени сигнала дискретным сигналом поступающим в определенный момент времени. Виды погрешностей: 1,2 ↑ 3. инструментальная (случайная) погрешность, которая появляется из-за шумов и помех, как во входном сигнале, так и в узлах АЦП из-за технологических отклонений, возникающих при изготовлении и эксплуатации АЦП. Точность изготовлений из цифровых элементов не влияет на точность преобразований Т.о. основное влияние оказывает наличие случайной погрешности во входном сигнале. Uвх=Uп+Е. Для повышения точности, надежности и доступности получения информации по входным каналам существует несколько способов: гальваническая развязка, аналоговая фильтрация, цифровая фильтрация, скрутка двух проводных линий связи и т.д. Поэтому, зная выходной код, можно говорить только о вероятности того или иного значения входной величины в пределах данного кванта. СКП. Квантование по уровню. Шаг квантования: Если D неизвестно, то оно рассч-ся через СКП по уровню( Округление D производится в меньшую сторону. СКП по времени. Зависит от 2 факторов: 1) от инерционности АЦП; 2) от скорости изменения входного сигнала в проц. преобразования. 1 фактор менее существен.по сравнению со 2. Поэтому частотные св-ва являются основным фактором при выборе АЦП. При расчете частоты квантования по времени могут использоваться 2 подхода: 1. По теореме Кательникова.2. замена преобразования величины некотор. аппроксимирующей зависимостью. 1 способ исп-ся при построении системной передачи информации. Применение: для выбора необход частоты квантования с неогранич.спектором на конечном временном интервале приводит к высоким требованиям к частоте f. 2 подход менее точен, но более простой. При использовании кусочно-линейной аппроксимации. Использование АЦП в многоканальном режиме работы ужесточает требование к частоте квантования в К раз, где К-кол-во входных каналов, обслуж.одним АЦП. В этом случае Т уменьш. в раз и расчет необходимо вести по входному каналу самом быстроизмен сигнале. Предварительный расчет АЦП. Суть методики состоит в вычислении СКП всех составляющих, оказывающих значительное влияние на СКП МСУ. В связи с этим задаются ограничения на каждую из всех составляющих по отношению к СКП входных каналов. Далее вычисляются параметры АЦП по допустимым расчетным составляющим СКП преобразования с последующим выбором серийного АЦП. Предварительный расчет учитывает требование к АЦП. АЦП не должен носить значительные погрешности измерения. Отличительные особенности - Двунаправленный обмен по двум линиям - Высокая скорость обмена — до 100 кбит и выше - Возможность адресации до 128 устройств - Простота программной реализации "Master"-абонента - Временная независимость процесса передачи Данное введение является формальным описанием шины I2C и предназначено только для достаточно подробного ознакомления с целью самостоятельной реализации частных алгоритмов связи. Для получения более полной информации обращайтесь к соответствующей литературе фирмы Philips. Все абоненты шины делятся на два класса — "Master" и "Slave".Устройство "Master" генерирует тактовый сигнал (SCL) и, как следствие, является ведущим. Оно может самостоятельно выходить на шину и адресовать любое "Slave" — устройство с целью передачи или приема информации. Все "Slave"-устройства "слушают" шину на предмет обнпружения собственного адреса и, распознав его, выполняют предписываемую операцию. Кроме того, возможен так называемый "Multi Master" — режим когда на шине установлено несколько "Master"-абонентов, которые либо совместно разделяют общие "Slave"-устройства, либо попеременно являются то "Master"-устройствами, когда сами инициируют обмен информацией, то "Slave", когда находятся в режиме ожидания обращения от другого "Master"-устройства. Режим "Multi Master" требует арбитража и распознавания конфликтов. Естественно, он сложнее в реализации (имеется ввиду программная реализации) и, как следствие, реже используется в реальных изделиях. В начальный момент времени — в режиме ожидания — обе линии SCL и SDA находятся в состоянии логической единицы (транзистор выходного каскада с ОК закрыт). В режиме передачи бит данных SDA стробируется положительным импульсом SCL. Смена информации на линии SDA производится при нулевом состоянии линии SCL. "Slave"-устройство может "придерживать" линию SCL в нулевом состоянии, например, на время обработки очередного принятого байта, при этом "Master"-устройство обя-зано дождаться освобождения линии SCL, прежде чем продолжить передачу информации. Для синхронизации пакетов шины I2C различают два условия —"Start" и "Stop", ограничивающие начало и конец информационного пакета. Для кодирования этих условий используется изменение состояния линии SCL, что недопустимо при передаче данных. "Start"-условие образуется при отрицательном перепаде линии SDA, когда линия SCL находится в единичном состоянии, и наоборот, 'Stop"-условие образуется при положи-тельном перепаде линии SDA при единичном состоянии линии SCL. Передача данных начинается по первому положительному импульсу на линии SCL, которым стробируется старший бит первого информационного байта. Каждый информационный байт (8 битов) содержит 9 тактовых периодов линии SCL. В девятом такте устройство-получатель выдает подтверждение (ACK) — отрицательный импульс, свидетельствующий о "взаимопонимании" передатчика и получателя. Сразу отметим, что любой абонент шины, как "Master", так и "Slave" может в разные моменты времени быть как передатчиком, так и получателем и в соответствии с режимом обязан либо принимать, либо выдавать сигнал ACK, отсутствие которого интерпретируется как ошибка. Чтобы начать операцию обмена устройство "Master" выдает на шину "Start"-условие, за которым следует байт с адресом "Slave"-устройства, состоящий из семибитового адреса устройства (занимает биты 1...7) и однобитового флага операции — "R/W" (бит 0) определяющего направление обмена, причем 0 означает передачу от "Master" к "Slave", а 1 — чтение из "Slave". Все биты передаются по шине I2C в порядке старший-младший, то есть первым передается 7-ой бит, последним 0-ой. За адресои могут следовать один или более информационных байтов (в направлении, определенном флагом R/W), биты которых стробируются сигналом SCL из "Master"-устройства. При совершении операции чтения "Master"-абонент должен сопровождать прочитанный байт сигналом ACK, если необходимо прочитать следующий байт, и не выдавать сигнала ACK, если собирается закончить чтение пакета. Допускается многократное возобновление "Slave"-адреса в одном цикле передачи, то есть передача повторного "Start"-условия без предварительного "Stop"-условия. Такой принцип широко применяется в управлении I2C абонентами, когда выдача нового "Start"-условия служит для синхронизации начала нового пакета данных, сопровождаемого, например, новым управляющим словом, уточняющим адресацию пакета. Интерфейс RS-485 Интерфейс RS-485 (другое название — EIA/TIA-485) — один из наиболее распространенных стандартов физического уровня связи. Физический уровень — это канал связи и способ передачи сигнала (1 уровень модели взаимосвязи открытых систем OSI). Сеть, построенная на интерфейсе RS-485, представляет собой приемопередатчики, соединенные при помощи витой пары — двух скрученных проводов. В основе интерфейса RS-485 лежит принцип дифференциальной (балансной) передачи данных. Суть его заключается в передаче одного сигнала по двум проводам. Причем по одному проводу (условно A) идет оригинальный сигнал, а по другому (условно B) — его инверсная копия. Другими словами, если на одном проводе "1", то на другом "0" и наоборот. Таким образом, между двумя проводами витой пары всегда есть разность потенциалов: при "1" она положительна, при "0" — отрицательна. Именно этой разностью потенциалов и передается сигнал. Такой способ передачи обеспечивает высокую устойчивость к синфазной помехе. Синфазной называют помеху, действующую на оба провода линии одинаково. К примеру, электромагнитная волна, проходя через участок линии связи, наводит в обоих проводах потенциал. Если сигнал передается потенциалом в одном проводе относительно общего, как в RS-232, то наводка на этот провод может исказить сигнал относительно хорошо поглощающего наводки общего ("земли"). Кроме того, на сопротивлении длинного общего провода будет падать разность потенциалов земель — дополнительный источник искажений. А при дифференциальной передаче искажения не происходит. В самом деле, если два провода пролегают близко друг к другу, да еще перевиты, то наводка на оба провода одинакова. Потенциал в обоих одинаково нагруженных проводах изменяется одинаково, при этом информативная разность потенциалов остается без изменений. Аппаратная реализация интерфейса — микросхемы приемопередатчиков с дифференциальными входами/выходами (к линии) и цифровыми портами (к портам UART контроллера). Существуют два варианта такого интерфейса: RS-422 и RS-485. RS-422 — полнодуплексный интерфейс. Прием и передача идут по двум отдельным парам проводов. На каждой паре проводов может быть только по одному передатчику. RS-485 — полудуплексный интерфейс. Прием и передача идут по одной паре проводов с разделением по времени. В сети может быть много передатчиков, так как они могут, отключаются в режиме приема. - D (driver) — передатчик;-R (receiver) — приемник;-DI (driver input) — цифровой вход передатчика;-RO (receiver output) — цифровой выход приемника;-DE (driver enable) — разрешение работы передатчика;-RE (receiver enable) — разрешение работы приемника; -A — прямой дифференциальный вход/выход;-B — инверсный дифференциальный вход/выход;-Y — прямой дифференциальный выход (RS-422);-Z — инверсный дифференциальный выход (RS-422). Остановлюсь поподробнее на приемопередатчике RS-485. Цифровой выход приемника (RO) подключается к порту приемника UART (RX). Цифровой вход передатчика (DI) к порту передатчика UART (TX). Поскольку на дифференциальной стороне приемник и передатчик соединены, то во время приема нужно отключать передатчик, а во время передачи —приемник. Для этого служат управляющие входы — разрешение приемника (RE) и разрешения передатчика (DE). Так как вход RE инверсный, то его можно соединить с DE и переключать приемник и передатчик одним сигналом с любого порта контроллера. При уровне "0" — работа на прием, при "1" — на передачу. Приемник, получая на дифференциальных входах (AB) разность потенциалов (UAB) переводит их в цифровой сигнал на выходе RO. Чувствительность приемника может быть разной, но гарантированный пороговый диапазон распознавания сигнала производители микросхем приемопередатчиков пишут в документации. Обычно эти пороги составляют ± 200 мВ. То есть, когда UAB > +200 мВ — приемник определяет "1", когда UAB <-200 мВ — приемник определяет "0". Если разность потенциалов в линии настолько мала, что не выходит за пороговые значения — правильное распознавание сигнала не гарантируется. Кроме того, в линии могут быть и не синфазные помехи, которые исказят столь слабый сигнал. Все устройства подключаются к одной витой паре одинаково: прямые выходы (A) к одному проводу, инверсные (B) — к другому. Входное сопротивление приемника со стороны линии (RAB) обычно составляет 12 КОм. Так как мощность передатчика не беспредельна, это создает ограничение на количество приемников, подключенных к линии. Согласно спецификации RS-485 c учетом согласующих резисторов передатчик может вести до 32 приемников. Однако есть ряд микросхем с повышенным входным сопротивлением, что позволяет подключить к линии значительно больше 32 устройств. Максимальная скорость связи по спецификации RS-485 может достигать 10 Мбод/сек. Максимальное расстояние — 1200 м. Если необходимо организовать связь на расстоянии большем 1200 м или подключить больше устройств, чем допускает нагрузочная способность передатчика —применяют специальные повторители (репитеры). Порты ввода/вывода Они имеются в любом МК. В МК AVR каждый разряд порта с помощью внутренних регистров может быть запрограммирован на ввод или на вывод информации: - Регистр «DDR» — для контроля направления передачи данных и привязки вывода к шине питания (VCC); - Регистр «PORT» При работе бита порта на вывод данных - как регистр выходных данных При работе порта на ввод данных — для привязки вывода к VCC через внутренний резистор 10кОм. Это применяется, когда необходимо входную линию порта установить в значение логической единицы «по умолчанию», чтобы подключать переключатель или кнопку напрямую к выводу порта; - Регистр «PIN» — для отображения логического уровня сигнала на физическом выводе микросхемы при операциях типа «чтение модификация-запись». Блок-схема организации портов ввода-вывода представлена на рис.9. Токовая нагрузочная способность на линию порта не более 20 мА. Также порты МК используются для выполнения альтернативных функций — в периферийных устройствах.
Назначение и области применения микропроцессорных устройств. | |||||||||||||||||||||
|
| Поделиться: |

 . 0<q<1-мантисса числа. p-порядок числа.
. 0<q<1-мантисса числа. p-порядок числа.
 ; N-число разреш.уровней квантования.(зависит от разрядностиАЦП) P-диапазон изменения входного сигнала.
; N-число разреш.уровней квантования.(зависит от разрядностиАЦП) P-диапазон изменения входного сигнала. 
 . R-количество разрядов.
. R-количество разрядов. ). Абсолютная ошибка квантования по уровню изменяется в пределах от -0,5D до +0,5D. И с равной вероятностью может принимать любое значение в этом диапазоне. След-но для ошибки в точке расчета можно принять равномерный закон распределения для которого дисперсия ошибки квантования по уровню:
). Абсолютная ошибка квантования по уровню изменяется в пределах от -0,5D до +0,5D. И с равной вероятностью может принимать любое значение в этом диапазоне. След-но для ошибки в точке расчета можно принять равномерный закон распределения для которого дисперсия ошибки квантования по уровню: 
 , где
, где 
 погрешности аппроксимации и
погрешности аппроксимации и  -вторая производная по времени от второго сигнала. Недостаток: сложность определения
-вторая производная по времени от второго сигнала. Недостаток: сложность определения  . Исп-ся ри грубых прикидочн. Работах и не учитывается статич.хар-ки сигналов. 4 подход: учитывается набор параметров, информирующих об объекте: диапазон изменения вх.сигнала Р и верхн частота в спектре сигнала
. Исп-ся ри грубых прикидочн. Работах и не учитывается статич.хар-ки сигналов. 4 подход: учитывается набор параметров, информирующих об объекте: диапазон изменения вх.сигнала Р и верхн частота в спектре сигнала  ; w=2π
; w=2π 
 . Для сигнала со спектром, имеющ. нормальное распределение
. Для сигнала со спектром, имеющ. нормальное распределение 
 . 5 подход: при использовании не мгновенных, а усредненных значений входного сигнала можно использовать формулу, не учитывающую диапазон изменения входного сигнала Эта формула предъявл.менее жесткие требования к частоте квантования.
. 5 подход: при использовании не мгновенных, а усредненных значений входного сигнала можно использовать формулу, не учитывающую диапазон изменения входного сигнала Эта формула предъявл.менее жесткие требования к частоте квантования. 
 .
. .
.  -коэф.приведения
-коэф.приведения  к
к  .
.  =
=  . 0<K<1. Чаще всего
. 0<K<1. Чаще всего  , при этом значение
, при этом значение  . Ошибку квантования по уровню можно снизить повысив частоту квантования
. Ошибку квантования по уровню можно снизить повысив частоту квантования  . Т.о. рассчитав значение СКП и зная параметры входного сигнала на основании выше приведенных формул, можно осуществить выбор серийного АЦП с точки зрения влияния его погрешности на погрешности всей системы в целом. Значение разрядности АЦП при расчете округляется в большую сторону. Если же серийного АЦП с такими характеристиками нет, то необходимо сформулировать новое ИТЗ.
. Т.о. рассчитав значение СКП и зная параметры входного сигнала на основании выше приведенных формул, можно осуществить выбор серийного АЦП с точки зрения влияния его погрешности на погрешности всей системы в целом. Значение разрядности АЦП при расчете округляется в большую сторону. Если же серийного АЦП с такими характеристиками нет, то необходимо сформулировать новое ИТЗ.


