Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
ТЕМА. Обробка частотних і часових сигналівСодержание книги Поиск на нашем сайте
МЕТА.Вивчення методів частотного перетворення. Навчитися здійснювати вимір частоти, періоду, тривалості дискретних сигналів за допомогою програмованих лічильників/таймерів ОЕОМ 1816ВЕ31, а також з використанням зовнішнього еталонного генератора
ТЕОРЕТИЧНІ ПОЛОЖЕННЯ У системах автоматичного керування часто доводиться вимірювати такі величини як: частота f, період Т, тривалість t, зрушення фаз. Для цього застосовується перетворення типу частота-код. Залежно від того, який саме параметр потрібно виміряти застосовують різні підходи. При вимірі частоти fx виконується підрахунок імпульсів вхідного сигналу, протягом фіксованого відрізку часу (рис. 6.1).
Рисунок 1.1 – Вимір частоти сигналу
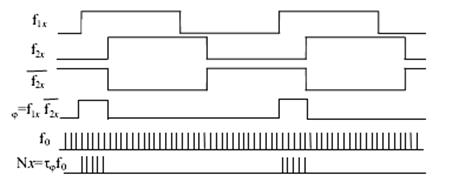
Такий метод прийнятний для виміру високих частот більше 100 Гц. Верхня межа обмежується швидкодією елементів схеми й розрядністю лічильників. Вимір частот нижче 100 Гц заміняється виміром періоду Tx. При цьому виконується підрахунок імпульсів фіксованої частоти f0 за інтервал рівному або кратний вимірюваному періоду (рис. 6.2). У такий же спосіб виміряється тривалість імпульсу t x, відмінність полягає лише в тому, що при вимірі тривалості імпульсів непотрібно ділити частоту на два.
Рисунок 6.2 – Вимір періоду проходження методом підрахунку кількості імпульсів відомої частоти При вимірі зрушення фаз часовий інтервал t x формують шляхом кон’юнкції сигналів f1x і f2x, отриманий інтервал часу вимірюють описаним вище методом (рис. 6.3). Схеми, що реалізують такий алгоритм, наведено на рис. 6.4.
Рисунок 6.3 – Вимір зрушення фаз
Рисунок 6.4 – Схеми для виміру частоти: а) низької; б) високої
У лабораторному стенді при наявності плати розширення до входу Т0 підключений постійний генератор частоти, а до входу Т1 підключений генератор зі змінною частотою. Сигнали цих генераторів можна спостерігати на осцилографі, підключеному до BNC рознімання. Для спостереження сигналу Т0 необхідно замкнути перемичку J1, а для Т1 – перемичку J3. Таймери/лічильники (Т/С) ОЕОМ призначені для підрахунку зовнішніх подій, для одержання програмно керованих часових затримок, виконання часозадаючих функцій ОЕОМ. До складу блоку Т/С входять: - два 16-ти розрядних регістри Т/С0, Т/С1; - 8-ми розрядний регістр режимів Т/С (TMOD); - 8-ми розрядний регістр керування (TCON); - схема інкременту; - схема фіксації ІNT0, ІNT1, Т0, Т1; - схема керування прапорами; - логіка керування Т/С. Два 16-розрядних регістри Т/С0 і Т/С1 виконують функцію зберігання вмісту підрахунку. Кожний з них складається з пари 8-ми розрядних регістрів, відповідно TH0, TL0. Регістри ТН0, TН1 – старші, регістри TL0, TL1 – молодші. Кожен з 8-ми розрядних регістрів можна використовувати як регістри загального призначення (РЗП), якщо Т/С не працює (біт TR0 для Т/С0 в регістрі керування TCON дорівнює "0"). Регістр режимів Т/С (TMOD) призначений для прийому й зберігання коду, що визначає: - один з чотирьох можливих режимів роботи кожного Т/С; - роботу як таймера або лічильника; - керування Т/С від зовнішнього виводу. Регістр режимів TMOD: MO-MI(0-1,4-5) – один з 4-х режимів лічильників С/Т(2, 6) – '0' таймер 'Г лічильник GATE – дозвіл керування від зовнішнього виводу (’0’ – заборонене, ’1’ – дозволене (ІNT0, INT1)) Регістр керування (TCON) призначений для прийому й зберігання коду керуючого слова. Регістр TCON не можна використати в якості РЗП. Схема інкременту призначена для збільшення на 1 у кожному машинному циклі вмісту регістрів Т/С0, Т/С1 для яких: - установлений режим таймера й рахунок дозволений; - установлений режим лічильника, рахунок дозволений і на відповідному вході схеми Т0 (для Т/С0) або Т1 (для Т/С1) зафіксований рахунковий імпульс у попередньому машинному циклі. Регістр керування TCON: TR – біт включення Т/С ('0' виключений); TF – прапор переповнення Т/С; IT – визначає вид переривання за входом ІNT (’0’ – за рівнем, ’1’ – за фронтом); IE – прапор запиту на переривання.
ПОРЯДОК ВИКОНАННЯ РОБОТИ 1 Вивчити методи частотного перетворення (апаратні й за допомогою програмованих лічильників/таймерів) 2 Вивчити методи виміру часових інтервалів. 3 Розробити алгоритм для виконання індивідуального завдання (табл. 6.1). 4 Розробити програму для виконання індивідуального завдання. 5 Набрати програму індивідуального завдання на персональному комп'ютері. 6 За допомогою ПВЗ проаналізувати виконання програми. 7 Завантажити програму в стенд ОЕОМ. Переконатися в правильному виконанні індивідуального завдання, при зміні значення вимірюваної частоти, при негативному результаті здійснити зміну алгоритму або програми. Повторити завантаження програми в стенд ОЕОМ. Таблиця 6.1 – Варіанти індивідуальних завдань
ЗМІСТ ЗВІТУ 1 Титульна сторінка. 2 Назва роботи, її мета. 3 Початкові дані. 4 Програмний код розробленого програмного забезпечення 5 Висновки за результатами роботи програми. КОНТРОЛЬНІ ПИТАННЯ 1 Охарактеризуйте методи й типи частотного й часового перетворення. 2 Назвіть основні параметри частотного перетворення. 3 Назвіть фактори, що впливають на помилку частотного перетворення. 4 Дайте визначення поняттю дозволяючої здатності частотного перетворення. 5 Яким сином здійснюється вимір періоду. 6 Дайте визначення характеристиці перетворення, нелінійності частотного перетворення. 7 Дайте характеристику апаратній реалізації частотного й часового перетворення. 8 Наведіть приклади практичного застосування частотного й часового перетворення. ЛАБОРАТОРНА РОБОТА №7
ТЕМА. Вивчення інтерфейсу I2C МЕТА. Навчитися здійснювати обмін між мікросхемами по інтерфейсі I2C
ТЕОРЕТИЧНІ ПОЛОЖЕННЯ Термінологія шини І2С Передавач– елемент, що посилає дані в шину. Приймач- елемент, що одержує дані із шини. Master – елемент, що ініціалізуючий передачу, генерує сигнали синхронізації, і завершує передачу. Slave (підлеглий) – елемент, адресований Master. Multi-master – система з більш ніж одним майстром. Арбітраж– процедура, що гарантує, що, якщо більше чим один майстер одночасно намагаються керувати шиною, тільки один з них отримує повне керування шиною й забезпечує передачу даних без помилок. Синхронізація– синхронізація передачі даних між елементами.
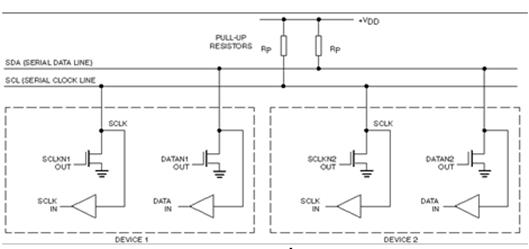
Рисунок 7.1 – Приклад конфігурації шини І2С, що використовує два мікроконтролери Загальні характеристики SDA і SCL – двонаправлені лінії з відкритим стоком (колектором), з'єднані з позитивною живлячою напругою через резистор. Коли шина вільна, обидві лінії перебувають у стані "1". Дані можуть передаватися по шині І2С зі швидкістю до 100 kbit/s у стандартному режимі, або до 400 kbit/s у швидкому режимі. Число інтерфейсів, з'єднаних із шиною винятково залежить від ємності шини.
Рисунок 7.2 – З'єднання І2С пристроїв Передача біта Через розмаїтість різних технологій (CMOS, NMOS, біполярні прилади) які можуть бути використані із шиною І2С, рівні логічного "0" і "1" не встановлені й залежать від величини живлячої напруги VDD. Для передачі одного біта даних використовується один імпульс сигналу синхронізації, при цьому рівень на лінії SDA повинен бути незмінним протягом високого рівня на лінії SCL, і може змінюватися тільки при низькому рівні на SCL (рис. 7.3). Виключеннями служать два особливих стани - START і STOP.
Рисунок 7.3 – Передача біта START і STOP Існують два особливих стани шини І2С - start і stop, які служать для індикації початку й кінця передачі й відповідно переходу шини в неактивний стан. Слід зазначити, що доти, поки не встановлений стан start, сигнали на лініях SDA і SCL можуть бути зовсім довільними (рис. 7.4). Це дозволяє, зокрема, використати одну лінію SDA і кілька ліній SLC (наприклад, при недостачі, адрес на одній шині). Стан START - перехід від "1" до "0" на лінії SDA при "1" на лінії SCL. Стан STOP - перехід від "0" до "1" на лінії SDA при "1" на лінії SCL Детектування станів start і stop у спеціалізованих елементах звичайно виконується апаратно. При повністю програмній реалізації шини I2С у мікроконтролерах без апаратної І2С-частини необхідно як мінімум 2 рази перевіряти стан лінії SDA.
Рисунок 7.4 – START і STOP стани. Передача даних Всі передачі виконуються 8-розрядними байтами. Число байтів, які можуть бути передані за одну передачу не обмежено. Кожен байт повинен супроводжуватися бітом підтвердження (АСК). Дані передаються починаючи зі старшого біта (MSB) (рис. 7.5). Якщо приймач не може одержати інший повний байт даних, він не видає сигнал АСК, що використовується передавачем для синхронізації або сигналізації про несправності приймача (або його відсутності).
Рисунок 7.5 – Передача даних по шині 1 С. ACKNOWLEDGE Для підтвердження передачі байта передавач встановлює лінію SDA в "1" протягом синхронізуючого імпульсу. Приймач при цьому повинен виставити "0" на SDA (рис. 7.6). Природно при цьому повинні бити витримані певні часові співвідношення. Звичайно, приймач, що був адресований, повинен генерувати сигнал АСК після того, як кожен байт був отриманий, за винятком того, коли повідомлення починається з адресою CBUS. Коли підлеглий приймач не підтверджує підлеглу адресу (наприклад, пристрій не готовий, тому що ще виконує деяку внутрішню функцію), лінія SDA даних повинна бути залишена в "1". Майстер потім може видати стан STOP, щоб перервати передачу. Якщо підлеглий приймач підтверджує підлеглу адресу, але, якийсь час пізніше не може одержувати більше байтів даних, майстер повинен призупинити передачу. При прийомі останнього байта в серії, замість сигналу АСК майстер може виставити стан STOP, при цьому підлеглий передавач повинен звільнити лінію даних.
Рисунок 7.6 – Підтвердження передачі ПОРЯДОК ВИКОНАННЯ РОБОТИ 1 Вивчити методи послідовної передачі даних між інтегральними мікросхемами. 2 Розробити алгоритм для виконання індивідуального завдання (табл. 6.1). 3 Розробити програму для виконання індивідуального завдання. 4 Набрати програму індивідуального завдання на персональному комп'ютері. 5 За допомогою ПВЗ проаналізувати виконання програми. 7 Завантажити програму в стенд ОЕОМ. Переконатися в правильному виконанні індивідуального завдання, при негативному результаті здійснити зміну алгоритму або програми. Повторити завантаження програми в стенд ОЕОМ. Таблиця 7.1 – Варіанти індивідуальних завдань
ЗМІСТ ЗВІТУ 1 Титульна сторінка. 2 Назва роботи, її мета. 3 Початкові дані. 4 Програмний код розробленого програмного забезпечення 5 Висновки за результатами роботи програми.
КОНТРОЛЬНІ ПИТАННЯ
1 Призначення й сфера застосування інтегральних пристроїв з послідовним інтерфейсом. 2 Часові параметри сигналів інтерфейсу І2С. 3 Протокол обміну через І2С. 4 Призначення зовнішніх адресних ліній на мікросхемах з І2С. 5 Використання декількох пристроїв на одному інтерфейсі. 6 Методи адресації різних пристроїв з І2С. СПИСОК ЛІТЕРАТУРИ
1 У.Томпкинса, Дж. Уэбстера Сопряжение датчиков и устройств ввода данных с компьютерами IBM PC. – М.: "Мир", 1992. 2 А.К. Марцинкявичус Быстродействующие интегральные микросхемы ЦАП и АЦП. – М.: "Радио и связь", 1990. 3 П.М. Грицевский, А.Е.Мамченко Основы автоматики, импульсной и вычислительной техники. – М.: "Радио", 1989. 4 В.С. Гутников Интегральная электроника в измерительных устройствах. – Л.: "Энегроатомиздат", 1990. 5 В.И. Зубчук Справочник по цифровой схемотехнике. – К.: "Техника", 1990. 6 С.В. Якубовский Цифровые и аналоговые интегральные микросхемы. Справочник. – М.: "Радио и связь", 1990. 7 В.П. Шило Популярные цифровые микросхемы. – М.: "Радио и связь", 1988. 8 Ф.В. Кушнир Радиотехнические измерения. – М.: "Связь", 1986. 9 В.Б. Абрайтис Быстродействующие интегральные микросхемы. – М.: Электронная промышленность, 1989. 10 Б.В. Шевкопляс Микропроцессорные структуры. – М.: "Радио и связь" 1990. 11 Г. Виглеб Датчики. – М.: Мир, 1989. 12 Г.П. Липовецкий. Однокристальные микроЭВМ. – М.: МП "БИНОМ", 1992. 13 С.Т. Хвощ. Микропроцессоры и микроЭВМ в системах автоматизации и управления. Справочник. – М.: Машиностроение, 1987. 14 В.С. Гутников. Интегральная электроника в измерительных устройствах. – Л.: Энергоатомиздат, 1988. 15 А.Л. Булычев. В.И. Галкин, В.А. Прохоренко Аналоговые интегральные схемы: Справочник. – Мн.: Беларусь, 1993. – 382 с.
Методичні вказівки щодо виконання лабораторних робіт з навчальної дисципліни “Мікропроцесорні пристрої” для студентів денної та заочної форм навчання за напрямом 6.050201 – “Системна інженерія” (у тому числі скорочений термін навчання)
Укладачі: ас. О.М. Кравець
Відповідальний за випуск завідувач кафедри САУЕ Д.Й. Родькін
Підп. до др. _______. Формат 60х84 1/16. Папір тип. Друк ризографія. Ум. друк. арк. ____. Наклад__прим. Зам. №______. Безкоштовно.
Видавничий відділ КДУ 39614. м. Кременчук, вул.. Першотравнева, 20
|
||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 247; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.41 (0.012 с.) |