
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Травмобезопасные рулевые механизмы ⇐ ПредыдущаяСтр 4 из 4
Травмобезопасный рулевой механизм является одним из элементов пассивной безопасности автомобиля. Рулевой механизм может быть причиной серьезной травмы водителя при лобовом столкновении автомобиля с препятствием. Травма может быть нанесена при смятии передней части автомобиля, когда весь рулевой механизм перемещается в сторону водителя. Поэтому картер рулевого механизма необходимо располагать в таком месте, где деформация при лобовом столкновении будет наименьшей. Водитель может получить травму также при резком перемещении вперед в результате лобового столкновения. Ремни безопасности при слабом их натяжении не предохраняют от столкновения с рулевым колесом или рулевым валом, когда перемещение вперед составляет 300...400 мм. Для пассажиров такое перемещение обычно не приводит к опасным последствиям. По статистике лобовые столкновения автомобилей составляют свыше 50% всех дорожно-транспортных происшествий. Вследствие этого как международные, так и национальные правила предписывают установку на автомобилях травмобезопасных рулевых механизмов. Существуют некоторые нормативы для испытания травмобезопасных рулевых механизмов. Так, при лобовом ударе (удар о бетонный куб при движении со скоростью 14 м/с ≈ 50 км/ч) верхний конец рулевого вала не должен перемещаться внутрь салона (кабины) в горизонтально направлении более чем на 127 мм (5"). На специальном манекене регистрируется величина усилия в горизонтальном направлении на уровне груди манекена при скорости 5,5 м/с ≈ 24 км/ч. Это усилие не должно превосходить 11,34 кН. Существуют травмобезопасные рулевые механизмы различных конструкций. Основное требование к ним - поглощение энергии удара, а следовательно, снижение усилия, наносящего травму водителю. Первоначально для придания рулевым механизмам травмобезопасных свойств устанавливали рулевое колесо с утопленной ступицей и с двумя спицами, что позволило значительно снизить тяжесть носимых повреждений при ударе. В дальнейшем, кроме этого, стали устанавливать специальный энергопоглощающий элемент. На рис.9. приведен рулевой механизм автомобиля ВАЗ-2121.
Рис.9. Травмобезопасный рулевой механизм автомобиля ВАЗ-2121.
Здесь рулевой вал состоит из трех частей, связанных карданными шарнирами. При лобовом столкновении, когда передняя часть автомобиля деформируется, рулевой вал складывается, при этом перемещение верхней части рулевого механизма внутрь салона незначительно. Перемещение рулевого механизма сопровождается некоторым поглощением энергии удара на деформацию кронштейна крепления рулевого вала. Особенность крепления кронштейна заключается в том, что два из четырех болтов 1 (передние) крепят кронштейн через пластинчатые шайбы, которые при ударе деформируются и проваливаются через прямоугольные отверстия кронштейна, а сам кронштейн деформируется, поворачиваясь относительно фиксированных точек крепления.
На автомобиле ГАЗ-3102 энергопоглощающий элемент травмобезопасного рулевого механизма представляет собой резиновую муфту, установленную между верхней и нижней частями рулевого вала (рис.10).
Рис.10. Травмобезопасный рулевой механизм автомобиля ГАЗ-3102: 1 - фланец; 2 - предохранительная пластина; 3 -резиновая муфта В ряде зарубежных конструкций энергопоглощающим элементом рулевого механизма служит сильфон, соединяющий рулевое колесо с рулевым валом (рис.11.а. ) или сам рулевой вал, в верхней части представляющий собой перфорированную трубу (рис.11.б.).
Рис.11. Травмобезопасные рулевые механизмы а – с энергопоглащающим сильфоном; б - с перфорированным трубчатым рулевым валом
На рис11.б. показаны последовательно фазы деформации перфорированной трубы и максимальная деформация, которая для этой конструкции значительна. Некоторое применение нашли энергопоглощающие элементы рулевых механизмов, в которых две части рулевого вала соединяются при помощи нескольких продольных пластин, привариваемых к концам соединяемых валов и деформирующихся при ударе. Такое энергопоглощающее устройство носит название «японский фонарик».
РУЛЕВЫЕ ПРИВОДЫ
К рулевому приводу предъявляют следующие требования: правильное соотношение углов поворота колес, отсутствие автоколебаний управляемых колес, а также самопроизвольного поворота колес при колебаниях автомобиля на подвеске.
Рулевой привод включает рулевую трапецию, рычаги и тяги, связывающие рулевой механизм с рулевой трапецией, а также рулевой усилитель, устанавливаемый на ряде автомобилей. Основные элементы Рулевая трапеция В зависимости от компоновочных возможностей рулевую трапецию располагают перед передней осью (передняя рулевая трапеция) или за ней (задняя рулевая трапеция). При зависимой подвеске колес применяют трапеции с цельной поперечной тягой; при независимой подвеске — только трапеции с расчлененной поперечной тягой, что необходимо для предотвращения самопроизвольного поворота управляемых колес при колебаниях автомобиля на подвеске. С этой целью шарниры разрезной поперечной тяги должны располагаться так, чтобы колебания автомобиля не вызывали их поворота относительно шкворней. Схемы различных рулевых трапеций показаны рис.12.
При зависимой и независимой подвесках могут применяться как задняя (рис.12а), так и передняя (рис.12б) трапеции. На рис.12 в-е приведены задние трапеции независимых подвесок с разным числом шарниров. Для определения геометрических параметров рулевой трапеции используют в большинстве случаев графические методы. Для этой цели предварительно задаются размерами поперечной тяги и боковых сторон трапеции, исходя из следующих соображений. В существующих конструкциях сечение продолжения осей боковых трапеции имеет место приблизительно на расстоянии 0,7 L. от передней оси, если трапеция задняя, и на расстоянии L, если трапеция передняя (рис.13).
а) б) Рис.13. Схемы расположения рулевой трапеции на автомобилях а – заднее; б - переднее
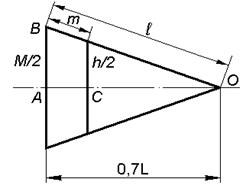
Считается, что оптимальное отношение длины т бокового рычага трапеции к длине п поперечной тяги m/n = 0,12...0,16. Численные значения n и т можно найти из подобия треугольников (рис.14):
Рис.14. Схема для определения параметров рулевой трапеции
где М — межшкворневое расстояние.
Учитывая, что m = (0,12...0,16) n и
Рис.15. График зависимости углов поворота управляемых колес
Далее по уравнению Если максимальная разница между теоретическим и фактическим значениями не превосходит 1,5° при максимальном угле поворота внутреннего колеса, то считается, что трапеция подобрана правильно. Следует напомнить, что уравнение (1) выведено для автомобиля с жесткими колесами. Для автомобиля с эластичными колесами связь между углами поворота управляемых колес выражается уравнением:
где С - продольное смещение мгновенного центра поворота относительно задней оси. Подбор параметров рулевой трапеции с учетом увода представляет известные трудности, так как продольное смещение мгновенного центра поворота зависит от скорости движения. Существует ряд аналитических способов определения оптимальных параметров рулевой трапеции, которые дают также приближенное значение искомых величин.
Поперечная тяга Для ее изготовления обычно применяют бесшовную трубу, на резьбовые концы которой навертывают наконечники с шаровыми пальцами. Длина поперечной тяги должна быть регулируемой, так как она определяет схождение колес. При зависимой подвеске, когда применяется неразрезная трапеция, регулирование выполняют поворотом поперечной тяги относительно наконечников (при освобождении стопорных гаек). Так как резьба, нарезанная на концах тяги, имеет разное направление, то поворот тяги вызывает изменение расстояния между шарнирами поперечной тяги. Часто шаг резьбы на разных концах тяги делают неодинаковым для более точной регулировки. Наличие зазора в шарнирах поперечной тяги недопустимо, поэтому предпочтительно применение шарниров с автоматическим регулированием зазора в процессе изнашивания, что возможно, когда усилие пружины 1 направлено по оси шарового пальца 2 (рис.16а). На рис.16б показан шарнир поперечной тяги (автомобили МАЗ), где зазор, образовавшийся в результате изнашивания, выбирают, вращая гайку 3, сжимающую пружину, для чего необходимо снять наконечник тяги.
Рис.16. Конструкции шарниров рулевых тяг Продольная тяга Связывающая сошку с поворотным рычагом тяга применяется главным образом при зависимой подвеске. Кинематически перемещения продольной тяги и подвески должны быть согласованы, чтобы исключить самопроизвольный поворот управляемых колес при деформации упругого элемента подвески. Компоновка, показанная на рис.17а, не обеспечивает необходимого согласования траекторий переднего конца продольной тяги 2 и центра колеса, из-за чего при вертикальных и угловых колебаниях автомобиля возникает «рыскание» управляемых колес.
Рис.17. Продольные рулевые тяги:
Сравнительно хорошее согласование может быть получено при расположение рулевого механизма 1 перед передней осью (рис.17б) или при расположений рулевого механизма за передней осью и передним расположением серьги листовой рессоры 3. Однако при переднем расположении серьги продольные силы, возникающие при наезде передних колес на препятствие, в большей степени передаются на раму автомобиля. Шаровые шарниры (рис.16в), размещенные по концам тяги, поджимаются жесткими пружинами 4, причем расположение шарниров и пружин дает возможность несколько амортизировать удары, воспринимаемые как левым, так и правым управляемыми колесами.
ПАРАМЕТРЫ ОЦЕНКИ Упругая характеристика рулевого управления. При абсолютно жестких элементах рулевого управления угловое передаточное число отражает жесткую кинематическую связь между углом поворота рулевого колеса и углами поворота управляемых колес. Такое угловое передаточное число принято называть кинематическим. При упругом рулевом управлении жесткая связь нарушается в результате реформации деталей рулевого механизма и рулевого привода. В этом случае такой же поворот рулевого колеса, как при жестком рулевом управлении, вызывает поворот управляемых колес на меньший угол — угловое передаточное число при упругом приводе получается большим. Угловое передаточное число, учитывающее упругие свойства рулевого управления, называют динамическим. Малая угловая жесткость рулевого управления (большая податливость) снижает чувствительность управления автомобилем. В этом случае влияние упругих свойств рулевого управления можно сравнить с влиянием боковой эластичности шин: автомобиль получает свойства недостаточной поворачиваемости. В то же время при малой жесткости рулевого управления толчки, воспринимаемые управляемыми колесами, хорошо амортизируются рулевым управлением. Следует отметить, что малая жесткость может вызвать нежелательные колебания управляемых колес и снижение устойчивости автомобиля. На современных автомобилях угловая податливость рулевого управления варьируется на легковых автомобилях от 1...3,5°/(Н∙м). Рулевые управления грузовых автомобилей имеют меньшую податливость. Податливость рулевого управления определяют при закрепленных управляемых колесах: измеряют углы поворота рулевого колеса и соответствующие этим углам моменты, приложенные к рулевому колесу. Для некоторых конструкций связь между углами поворота рулевого колеса и приложенными моментами нелинейна. Упругость рулевого управления может оцениваться также частотой собственных угловых колебаний одномассовой системы:
где
Частота собственных угловых колебаний должна быть не ниже 3 Гц.
КПД При оценке рулевого привода необходимо учитывать потери на трение во всех шарнирных соединениях. По имеющимся данным, КПД рулевого привода лежит в пределах РУЛЕВЫЕ УСИЛИТЕЛИ
Рулевые усилители устанавливают на легковых автомобилях высокого класса, грузовых автомобилях средней и большой грузоподъемности, а также на автобусах, при этом облегчается управление автомобилем, повышается его маневренность, увеличивается безопасность при разрыве шины. Следует, однако отметить, что при применении усилителя несколько повышается износ шин, а также ухудшается стабилизация yпpaвляемых колес.
Усилитель, включенный в рулевое управление, имеет следующие oбязaтeльные элементы: - источник питания (в пневмоусилителе - компрессор, в гидроусилителе - гидронасос); - распределительное устройство; - исполнительное устройство — пневмо- или гидроцилиндр.
К рулевым усилителям предъявляют следующие требования: 1. Обеспечение кинематического и силового следящего действия (кинематическое следящее действие — пропорциональность между угловым перемещением рулевого колеса и углом поворота управляемых колес; силовое следящее действие — пропорциональность между силой, приложенной к рулевому колесу, и силой сопротивления повороту управляемых колес); 2. Сохранение возможности управления автомобилем в случае выхода из строя усилителя; 3. Обеспечение минимального времени срабатывания усилителя; 4. Минимальное влияние на стабилизацию управляемых колес; 5. Исключение возможности произвол включения от толчков управляемых колес.
Рулевые усилители классифицируют по следующим признакам: 1. По виду применяемого рабочего тела - гидравлические; - пневматические. 2. По компоновке элементов; - все элементы в одном агрегате; - распределитель и гидроцилиндр в одном агрегате, рулевой механизм отдельно; - распределитель и рулевой механизм в одном агрегате, гидроцилиндр отдельно; - все элементы отдельно. 3. По конструкции распределителя: - золотниковые (осевые, роторные); - клапанные. 4. В зависимости от устройств, определяющих функциональные свойства: - с реактивными камерами; - с реактивными камерами и центрирующими пружинами; - с центрирующими пружинами.
В настоящее время в основном применяются гидроусилители с золотниковыми распределителями. К достоинствам гидроусилителей следует отнести: - небольшие размеры благодаря высокому рабочему давлению (6...10 МПа); - малое время срабатывания (0,2...2,4 с); - поглощение ударов и толчков, воспринимаемых управляемыми колесами со стороны дороги и передаваемых на рулевое колесо.
Вместе с тем при применении гидроусилителя несколько снижается стабилизация управляемых колес, так как стабилизирующий момент на колесах должен преодолевать сопротивление жидкости в гидроусилителе. Гидроусилители должны иметь надежные уплотнения, так как течь жидкости приводит к выходу гидроусилителя из строя. Пневмоусилители в настоящее время применяют редко. Их использовали главным образом на грузовых автомобилях большой грузоподъемности, имевших пневматические тормозные приводы. Основные недостатки пневмоусилителей: большое время срабатывания (в 5...10 раз больше, чем у гидроусилителей), и большие размеры, что связано с невысоким рабочим давлением (0,6...0,8 МПа).
Критерии оценки Для оценки усилителей используют следующие критерии Силовая статическая характеристика. Эта характеристика определяется зависимостью усилия на рулевом колесе от момента сопротивления повороту колес при отсутствии и при наличии усилителя (рис.18).
а) б) в) Рис.18. Статические характеристики рулевою управления: Характер зависимости в значительной степени определяется конструкцией распределителя. На рис.18а показана статическая характеристика усилителя, в котором распределитель не имеет центрирующих пружин, но имеет реактивные камеры. На рис.18б приведена статическая характеристика усилителя с распределителем, снабженным реактивными камерами и центрирующими пружинами. На рис.18в статическую характеристику определяет усилитель, в котором распределитель имеет только центрирующие пружины, предварительно сжатые. За точкой, соответствующей максимальному усилию, создаваемому усилителем РУmax дальнейшее повышение усилия рулевого управления может быть получено только при приложении водителем большего усилия к рулевому колесу.
Коэффициент эффективности Э Коэффициент эффективности - отношение усилия на рулевом колесе без усилителя к усилию на рулевом колесе при работающем усилителе, т.е.:
где
На графиках рис.18 кривые коэффициента эффективности усилителя, построены по силовой статической характеристике. На рис.18а принято, что трение в элементах рулевого управления отсутствует; это позволяет считать коэффициент эффективности постоянным. Зоны Показатели чувствительности Угол поворота рулевого колеса и усилие на рулевом колесе, необходимые для включения усилителя, характеризуют его чувствительность. Угол поворота рулевого колеса, необходимый для включения усилителя определяется суммарным зазором в рулевом управлении и смещением при этом золотника распределителя. Этот угол находится в пределах 10...15°. Усилие на рулевом колесе, необходимое для включения усилителя 20...50 Н. Показатель реактивного действия Этот показатель характеризует силовое следящее действие усилителя, обеспечивающее «чувство дороги»:
Показатель обратного включения усилителя Усилие, передаваемое от колес, для ■ перемещения корпуса золотника, при котором усилитель может включаться:
где
КОМПОНОВКА ЭЛЕМЕНТОВ Существует несколько схем компоновки элементов гидроусилителей. Практическое применение получили четыре схемы. Схема № 1 (рис.19).
Рис.19. Компоновка гидроусилителя по схеме №1 Рулевой механизм РМ, гидрораспределитель ГР и гидроцилиндр ГЦ представляют собой один агрегат, который называют усилителем интегрального типа (гидроруль); гидронасос ГН и бачок с рабочей жидкостью Б располагаются отдельно. Такая компоновка применяется на всех автомобилях ЗИЛ и КамАЗ. Достоинством схемы является: - компактность; - малая длина трубопроводов; - малое время срабатывания усилителя. К недостаткам схемы следует отнести дополнительное нагружение всех деталей рулевого управления, а также кронштейна (или рамы) в месте крепления картера гидроруля, усилием, создаваемым гидроцилиндром. На рис.20. показана компоновка на автомобиле и конструкция гидроусилителя автомобиля КамАЗ.
Рис.19. Компоновка на автомобиле и конструкция гидроусилителя автомобиля КамАЗ Здесь винтореечный рулевой механизм объединен с гидроцилиндром, гидрораспределителем и угловым редуктором в общем картере. Для охлаждения масла предусмотрен специальный радиатор 1. Угловой редуктор 8, передаточное число которого равно единице, служит для передачи вращения от вала рулевого колеса к винту рулевого механизма, поскольку рулевой механизм расположен горизонтально. Рулевой вал, соединяющий рулевое колесо с редуктором, составной; он включает вал рулевой колонки 3 и карданный вал 2 с двумя карданными шарнирами. Винт рулевого механизма, поворачиваясь, перемещает шариковую гайку 10, закрепленную в поршне-рейке; рейка, перемещаясь, поворачивает зубчатый сектор 9, выполненный за одно с валом сошки. В отдельном корпусе, прикрепленном к корпусу редуктора, установлен осевой золотниковый гидрораспределитель. Золотник гидрораспределителя 4 закреплен на конце вала винта между двумя упорными подшипниками 12 и 13. Золотник вместе с подшипниками имеет возможность перемещаться относительно корпуса в осевом направлении на 1,1 мм в обе стороны от нейтрального положения. В нейтральном положении золотник удерживается центрирующими пружинами 6, которые воздействуют на упорные подшипники через реактивные плунжеры 5 и 7. При повороте рулевого колеса в начальный момент, вследствие сопротивления повороту со стороны дороги, поршень усилителя остается неподвижным, а винт 11 получает осевое перемещение вместе с золотником на 1,1 мм. При этом, в зависимости от направления поворота рулевого колеса, золотник сообщает одну полость гидроцилиндра с напорной гидролинией, а другую— со сливной гидролинией. В реактивных камерах (между плунжерами) создается давление тем большее, чем больше сопротивление повороту. При большем давлении перемещение реактивных плунжеров требует большего усилия, что позволяет водителю «чувствовать» дорогу. В усилителе предусмотрены предохранительный клапан, ограничивающий максимальное давление в системе до 6,5...7,0 МПа, и предохраняющий от перегрузок гидронасос, а также перепускной клапан, соединяющий обе полости цилиндра, уменьшая этим гидравлическое сопротивление при повороте в случае, если гидронасос не работает.
Схема № 2 (рис.21).
Рис.21. Компоновка гидроусилителя по схеме 2
В усилителе этого типа гидрораспределитель ГР смонтирован в одном блоке с гидроцилиндром ГЦ отдельно от рулевого механизма. Такая компоновка применяется на автомобиле МАЗ MA3-5335. Достоинством схемы являются: - возможность применения рулевого механизма любой конструкции; - меньшая сложность и стоимость по сравнению со схемой 1; - несколько меньшее число деталей нагруженных гидроусилителем.
Гидроусилитель автомобиля МАЗ-5335 представлен на рис.22.
Рис.22. Гидроусилитель автомобиля МАЗ-5335 Осевой золотниковый гидрораспределитель 1 своим корпусом закреплен на корпусе шаровых шарниров 2, который, в свою очередь связан с гидроцилиндром 4 при помощи резьбового соединения. Шаровой палец 3 рулевой сошки помещен в стакане, который может перемещаться вместе с пальцем в осевом направлении в пределах 4 мм, перемещая одновременно закрепленный в стакане золотник гидрораспределителя. Шаровой палец 5 соединен с продольной рулевой тягой. В нейтральном положении золотник центрируется реактивными камерами, центрирующие пружины отсутствуют. Гидроусилитель обладает большой чувствительностью, включаясь при перемещении золотника на 0,4...0,6 мм. Схема № 3 (рис.23).
Рис.23. Компоновка гидроусилителя по схеме 3
В этой схеме гидрораспределитель ГР располагается перед рулевым механизмом РМ, а гидроцилиндр ГЦ - отдельно. По такой схеме выполнены усилители автомобилей Урал - 4320 и КАЗ-4540. При установке гидрораспределителя перед рулевым механизмом увеличивается чувствительность гидроусилителя. Недостатком схемы является большая длина трубопроводов, особенно если гидроцилиндр располагается на удалении от рулевого механизма. Схема № 4 (рис.24).
Рис.24. Компоновка гидроусилителя по схеме 4 Отличительная особенность этой схемы - раздельное размещение всех элементов гидроусилителя. По такой схеме выполнен усилитель автомобиля ГАЗ-66. Достоинством схемы является свободная компоновка, возможность применения рулевого механизма любой конструкции. Основной недостаток — большая длина трубопроводов. Следует отметить, что большая длина трубопроводов между гидрораспределителем и гидроцилиндром в любой конструкции гидроусилителя часто приводит к пульсации давления в системе и возбуждению колебаний управляемых колес. При удержании рулевого колеса в нейтральном положении золотник гидрораспределителя, шарнирно связанный с сошкой рулевого механизма, также находится в нейтральном (среднем) положении. Нагнетаемое гидронасосом масло свободно циркулирует через открытый центр гидрораспределителя на слив в бачок, конструктивно объединенный с гидронасосом. В гидроцилиндре по обе стороны поршня устанавливается одинаковое давление слива. При повороте рулевого колеса, например, влево золотник перемещается относительно корпуса гидрораспределителя в направлении, в котором продольная тяга должна обеспечивать поворот управляемых колес влево. При таком перемещении золотника левая полость гидроцилиндра соединяется с напорной гидролинией насоса, а правая полость — со сливной гидролинией. В левой полости гидроцилиндра создается давление, под действием которого поршень перемещается вправо, передавая через шток усилие на поворотный рычаг в направлении, соответствующем повороту управляемых колес влево. При совершении поворота с постоянным радиусом, когда рулевое колесо остановлено в повернутом положении, золотник распределителя также остановлен. Если не учитывать стабилизирующие моменты на управляемых колесах автомобиля, то можно считать, что золотник занимает нейтральное положение, а усилитель выключен. Однако при наличии стабилизирующих моментов за счет обратной связи усилие от них передается на корпус гидрораспределителя и последний продолжает перемещаться до тех пор, пока золотник не займет несколько смещенное относительно нейтрального положение. При этом правая полость гидроцилиндра будет по-прежнему сообщаться со сливной гидролинией, а в левой полости в результате дросселирования масла через щелевой зазор между кромкой золотника и корпусом будет поддерживаться некоторое давление, достаточное для удержания колес в повернутом состоянии, когда на них действует стабилизирующий момент, стремящийся вернуть колеса в нейтральное положение. Каждому фиксированному углу поворота рулевого колеса соответствует пропорциональное ему фиксированное положение управляемых колес. Таким образом, гидрораспределитель обеспечивает кинематическое следящее действие. Гидрораспределитель обеспечивает также силовое следящее действие в результате того, что момент сопротивления повороту управляемых колес уравновешивается суммарным моментом сил, действующих на продольную тягу и шток гидроцилиндра:
где
S - плечо поворотного рычага.
Усилие на штоке поршня гидроцилиндра
где
Усилие на продольной тяге
де
Рассматривая равновесие золотника распределителя (без учета трения), имеем:
где
Подставив значения
Приравняв выражения (4) и (5), найдем:
Полученное значение
Таким образом, момент сопротивления повороту управляемых колес связан с усилием на рулевом колесе прямо пропорциональной зависимостью.
|
|||||||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 485; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.240.21 (0.116 с.) |




 Рис.12. Схемы рулевых трапеций
Рис.12. Схемы рулевых трапеций
 ;
; 
 получим уравнение с одним неизвестным, решение которого дает приближенные численные значения искомых величин. Так же можно найти приближенные значения параметров передней трапеции. По полученным данным выполняют в масштабе графическое построение рулевой трапеции. Затем, построив через равные угловые промежутки положение цапфы внутреннего колеса, графически находят соответствующие положения наружного колеса и строят график зависимости θн = f(θн) (рис.15), которую называют фактической (штриховая кривая).
получим уравнение с одним неизвестным, решение которого дает приближенные численные значения искомых величин. Так же можно найти приближенные значения параметров передней трапеции. По полученным данным выполняют в масштабе графическое построение рулевой трапеции. Затем, построив через равные угловые промежутки положение цапфы внутреннего колеса, графически находят соответствующие положения наружного колеса и строят график зависимости θн = f(θн) (рис.15), которую называют фактической (штриховая кривая).
 строят теоретическую зависимость (сплошная кривая).
строят теоретическую зависимость (сплошная кривая).
 ,
,  — углы увода соответственно наружного и внутреннего колес;
— углы увода соответственно наружного и внутреннего колес;


 — угловая жесткость рулевого привода;
— угловая жесткость рулевого привода; — суммарный момент инерции управляемых колес.
— суммарный момент инерции управляемых колес. = 0,92...0,95. Общий КПД рулевого управления
= 0,92...0,95. Общий КПД рулевого управления  .
.

 - усилие на рулевом колесе без усилителя;
- усилие на рулевом колесе без усилителя; - усилие, создаваемое усилителем, приведенное к рулевому колесу.
- усилие, создаваемое усилителем, приведенное к рулевому колесу. (рис.18бив) характеризуют усилие на рулевом колесе, соответствующее включению усилителя. Это усилие необходимо для сжатия центрирующих пружин при перемещении золотника распределителя и для преодоления трения. В связи с этим коэффициент эффективности получается переменным. В выполненных конструкциях усилителей Эmax = 10...15.
(рис.18бив) характеризуют усилие на рулевом колесе, соответствующее включению усилителя. Это усилие необходимо для сжатия центрирующих пружин при перемещении золотника распределителя и для преодоления трения. В связи с этим коэффициент эффективности получается переменным. В выполненных конструкциях усилителей Эmax = 10...15.

 - усилие центрирующих пружин золотника;
- усилие центрирующих пружин золотника; - силы трения в рулевом механизме, приведенные к шаровому пальцу сошки при передаче усилия от рулевой сошки к рулевому колесу.
- силы трения в рулевом механизме, приведенные к шаровому пальцу сошки при передаче усилия от рулевой сошки к рулевому колесу.





 (2)
(2) - усилие на штоке гидроцилиндра;
- усилие на штоке гидроцилиндра; - усилие на продольной тяге;
- усилие на продольной тяге; (3)
(3) - давление в напорной гидролинии;
- давление в напорной гидролинии; - рабочая площадь поршня гидроцилиндра.
- рабочая площадь поршня гидроцилиндра. (4)
(4) - плечо рулевой сошки.
- плечо рулевой сошки. (5)
(5) - площадь торца золотника, обращенного к реактивной камере, находящейся под давлением.
- площадь торца золотника, обращенного к реактивной камере, находящейся под давлением. (6)
(6) (7)
(7)



