Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Если регулирующее воздействие регулятора пропорционально скорости изменения регулируемой величины, то такой регулятор называется дифференциальным.
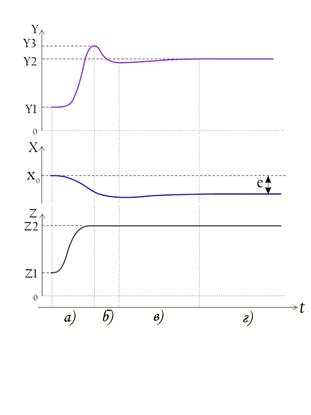
Рисунок 1.7. Модель САР с Д-регулятором
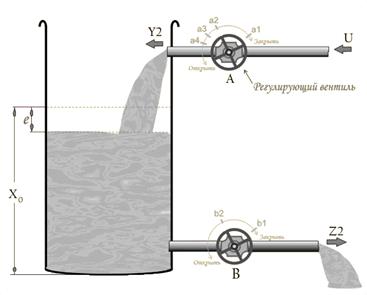
Вернемся к примеру ручного регулирования (см. этап 2). Вспомним, что для того, чтобы остановить понижение уровня воды, мы медленно открывали вентиль [A] и осуществили регулирование по аналогии с действием пропорциональной составляющей автоматического регулятора с широкой PB. Чтобы ускорить процесс регулирования, можно открывать вентиль [A] быстрее, но в этом случае потребуется неоднократно прикрывать и снова открывать вентиль [A], чтобы погасить возникшие колебания уровня воды, и регулирование будет проходить по аналогии с действием пропорциональной составляющей в регуляторе с оптимальной PB (см. рисунок 1.3). Система находится в равновесии. Поток [Y1] равен потоку [Z1]; уровень зафиксирован у отметки [Xо] (см. рисунок 1.7). а) Откроем больше вентиль [B], повернув его в положение [b2]. Поток выливающейся воды из бака увеличится до величины [Z2], и уровень в баке начнет понижаться. Сделаем примерную оценку возмущающего воздействия (насколько увеличился поток выливающейся воды из бака) по скорости понижения уровня воды в водомерном стекле и, соответственно, откроем вентиль [A] так, чтобы поток вливающейся воды [Y3] был заведомо больше потока выливающейся воды [Z2]. Причем для этого вентиль [A] должен быть повернут в положение [a4]. б) Так как мы имеем дело с большой инерционной системой (бак с водой) и все процессы протекают со значительной задержкой, начнем прикрывать вентиль [A] не дожидаясь конечного результата изменения регулируемой величины, пытаясь приблизить величину потока [Y] к величине потока [Z2]. В результате будет осуществлено регулирующее воздействие, которое благодаря “ударному”, мощному характеру практически остановило понижение уровня воды в баке на начальной стадии переходного процесса. в) Сбалансируем оба потока, приоткрывая и прикрывая вентиль [A], и тем самым зафиксируем новое положение уровня. В рассмотренном примере регулирование выполнено в такой же последовательности, как и в ПД-регуляторе, где: а) процесс регулирования аналогичный, как при работе дифференциальной составляющей автоматического регулятора; б) процесс регулирования аналогичный, когда на затухающую дифференциальную составляющую накладывается пропорциональная составляющая;
в) регулирование подобное действию пропорциональной составляющей; г) новое устойчивое состояние. Дифференциальное воздействие не является точным, и его величина устанавливается заранее при настройке регулятора. Параметры настройки рассчитывают используя данные, полученные в ходе исследования реакции САР на возмущающее воздействие. В чистом виде дифференциальный регулятор не применяется и совмещается с пропорциональным регулятором или пропорционально-интегральным.
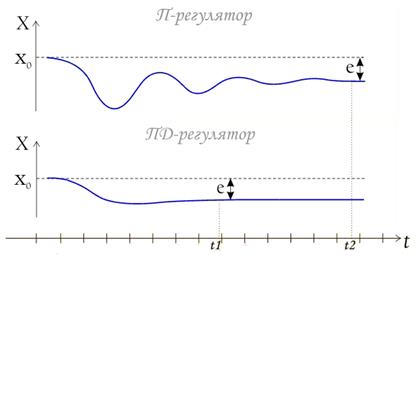
Рисунок 1.8. Сравнение П- и ПД-регуляторов
Пропорционально-интегральный-дифференциальный регулятор – это регулятор непрямого действия, в котором наряду с жесткой обратной связью (ОС) имеется положительная гибкая обратная связь (ПОС) и отрицательная гибкая обратная связь (ООС). В ПИД-регуляторах благодаря дифференциальной составляющей процесс регулирования происходит быстрее, чем в ПИ-регуляторах, но во многих случаях, когда процесс регулирования характеризуется высокой динамичностью, как например, в САР регулирования потока или давления, дифференциальную составляющую исключают, чтобы избежать явления самовозбуждения.
|
|||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 89; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.221.245.196 (0.005 с.) |