Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Пьезоэлектрические преобразователи силы, давления и ускоренияСодержание книги
Поиск на нашем сайте
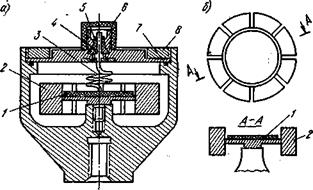
Принципиальная конструкция и измерительные цепи. На рис, 3-5 схематически изображено устройство пьезоэлектрического преобразователя. Измеряемое давление Р действует на мембрану 1, представляющую собой дно корпуса преобразователя. Кварцевые пластины 2 соединены параллельно. Наружные обкладки кварцевых пластин заземляются, а средняя обкладка (латунная фольга 3) изолируется относительно корпуса самим кварцем, имеющим очень высокое удельное сопротивление.
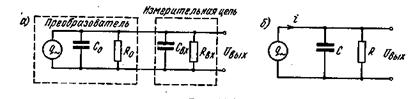
Рис. 3-5 Сигнал с кварцевых пластин снимается экранированным кабелем 5. Для удобства соединения вывода от фольги с внутренней жилой кабеля в корпусе преобразователя предусмотрено отверстие, закрываемое пробкой 4. Выходная мощность пьезоэлектрических преобразователей очень мала, поэтому на выход преобразователя должен быть включен усилитель с возможно большим входным сопротивлением. Эквивалентная схема преобразователя, соединенного кабелем с измерительной цепью, представлена на рис. (3-6, а), на котором С0 — емкость между гранями пьезоэлектрика (емкость преобразователя); Свх — емкость кабеля и входная емкость измерительной цепи; R0 — сопротивление преобразователя с учетом сопротивления изоляции линии относительно земли; Rвх — входное сопротивление измерительной цепи.
Рис. 3-6 Эквивалентную схему можно упростить согласно рис. (3-6, б), где сопротивление R=R0Rвх/(R0+R вх) и емкость С =С0+Свх. Выходное напряжение преобразователя с подключенной к нему измерительной цепью составляет
Как видно из выражения (3-1), амплитуда напряжения и сдвиг фаз между напряжением и измеряемой силой зависят от частоты:
и
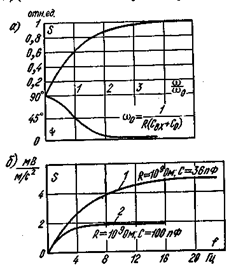
Амплитудно-частотная и фазо-частотная характеристики преобразователя, включенного в измерительную цепь, представлены на рис. (3-7, а). Из выражений (3-2) и (3-3) следует, что напряжение на входе усилителя не будет зависеть от частоты только при высоких частотах ω>1/R(Свх+С0) и будет равно
Как видно из последнего выражения, выходное напряжение преобразователя зависит от емкости входной цепи. Поэтому, если в характеристиках преобразователя указывается его чувствительность по напряжению, то обязательно должна быть указана и емкость соответствующая этой чувствительности. В ряде случаев указывается чувствительность по количеству электричества Q/F и собственная емкость преобразователя С0 или напряжение холостого хода Uвых=d11F/C0 и также собственная емкость преобразователя. Для расширения частотного диапазона измеряемых величин в сторону низких частот, очевидно, следует увеличивать, постоянную времени цепи τ=R(Свх+/C0). Для того чтобы получить представление о тех значениях сопротивлений и емкостей, которых практически приходится добиваться, на рис. (3-7, б)приведены кривые чувствительности пьезоэлектрического акселерометра в функции частоты для различных сочетаний R и С=С0+Свх. Расширение частотного диапазона путем увеличения емкости Свх (кривая 2 на рис. 3-7) легко осуществляется включением параллельно преобразователю конденсаторов, однако, как видно из формулы (3-4), это приводит к уменьшению выходного напряжения преобразователя. Увеличение сопротивления R приводит к расширению частотного диапазона без потери чувствительности, однако трудно повысить входное сопротивление усилителя R вх больше : чем до 108—109 Ом. Собственное сопротивление пьезоэлемента R0 определяется удельным сопротивлением материала пластин и их поверхностным сопротивлением. Первая составляющая, в особенности для кварца (1018—1016 Ом), как правило, значительно выше второй, поэтому определяющим является поверхностное сопротивление, для повышения которого до Rпов =109—1010 Ом преобразователь приходится герметизировать. Для увеличения чувствительности пьезоэлектрического преобразователя его пьезоэлемент выполняется в виде ряда параллельно соединенных при помощи металлических прокладок 2 пластин 1 (рис. 3-8). В этом случае чувствительность преобразователя определяется формулой S=d11n/(CBX + пС0), где n — число параллельно соединенных пластин; С0 — емкость одной пластины.
Рис. 3-7 Ограничение частотного диапазона пьезоэлектрических преобразователей в области низких частот затрудняет градуировку датчиков статическими силами, это приводит к усложнению градуировочной аппаратуры и весьма существенным погрешностям градуировки. Поэтому большой интерес представляют измерительные цепи, позволяющие измерять заряд без изменения его в течение хотя бы сотен секунд. Для этих целей применяются специальные усилители с емкостной обратной связью которые фактически являются усилителями заряда. Погрешности пьезоэлектрических преобразователей складываются прежде всего из погрешности от изменения параметров измерительной цепи (емкости Свх), температурной погрешности, вызываемой изменением пьезоэлектрической постоянкой, погрешности вследствие неправильной установки пластин, погрешности из-за чувствительности к силам, действующим перпендикулярно измерительной оси преобразователя, и частотной погрешности.
Рис. 3-8 В диапазоне низких частот частотная погрешность вычисляется, как следует из выражения (3-2), по формуле
Верхняя граница допустимого частотного диапазона определяется в основном механическими параметрами преобразователя. Пьезоэлектрические преобразователи могут быть выполнены с частотой собственных колебаний f 0≈100 кГц, что позволяет измерять механические величины, изменяющиеся с частотой до 7 — 10 кГц. Конструкции пьезоэлектрических преобразователей. Достоинствами пьезоэлектрических преобразователей являются малые габариты, простота конструкции, надежность в работе, возможность измерения быстропеременных величин. Наиболее широкое распространение пьезоэлектрические преобразователи получили для измерения вибрационных ускорений. На рис. 3-9 представлена конструкция пьезоэлектрического датчика акселерометра, разработанного И. М. Козловым и Э. М. Шмаковым в Ленинградском политехническом институте им. М. И. Калинина. Все элементы датчика крепятся к основанию 1 выполненному из титана. Преобразователь 2 состоит из двух включенных параллельно пьезоэлементов из кварца Х-среза. Инерционная масса 3 для уменьшения габаритов датчика изготовлена из легкообрабатываемого сплава ВНМЗ-2 с высокой плотностью 18 Мг/м3 (18 г/см3). Сигнал с кварцевых пластин снимается при помощи вывода из латунной фольги 4, соединенного с кабелем 6. Кабель крепится к основанию при помощи пайки. Датчик закрывается крышкой 5, навинчиваемой на основание. На основании 1 нарезана резьба для крепления датчика на объекте. Масса датчика 35 г, рабочий диапазон 1—150 м/с2. При конструировании датчика акселерометра одним из основных вопросов является крепление пьезочувствительных пластин к основанию и инерционной массе. Сочленение пластин с основанием и инерционной массой в датчике, представленном на рис. 3-9, осуществляется посредством пайки, что позволяет прибору работать до 200° С. К кабелю, соединяющему датчик акселерометра с усилителем, предъявляются следующие требования: большое сопротивление изоляции, малая емкость между жилой и экраном, гибкость и антивибрационность. Последнее означает, что при вибрации кабель не должен наводить на вход усилителя э. д. с. возникающую в результате трения изоляции при тряске об экран. Лучшим является кабель типа АВК-3, имеющий емкость 70—80 пФ/м.
Рис. 3-9
Рис. 3-10
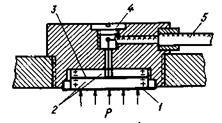
Повышенную чувствительность имеют преобразователи с пьезоэлементами, работающими на изгиб, однако они имеют значительно более низкую собственную частоту и поэтому применяются только в низкочастотных датчиках. На рис. 3-10 схематически представлена конструкция такого датчика низкочастотного акселерометра. Здесь пьезоэлемент 1, называемый биморфным, составлен из двух пластин. К нему приклеен груз 2. При действии силы F пьезоэлемент прогибается, верхняя пластина испытывает растяжение, нижняя — сжатие, и на пластинах наводятся заряды так, как это показано на рис. 3-10. Конструкция датчика типа Д19 с изгибным пьезоэлементом, выпускаемого таганрогским заводом «Виброприбор», показана на рис. 3-11. Пьезоэлемент 1 из пьезокерамики ЦТС-19 наклеен на упругий элемент 2, представляющий собой круглую плоскую пружину с инерционной массой в виде кольца, прорезанного пазами (рис. 3-11, б). Упругий элемент закреплен в центре и при действии ускорения испытывает изгибную деформацию. Размеры пьезоэлемента и упругого элемента выбраны таким образом, чтобы пьезоэлемент испытывал при этом деформацию только одного знака. Заряде пьезоэлемента снимается при помощи гибкого проводника 3, который подпаивается к верхней обкладке пьезоэлемента и контакту 4, изолированному от корпуса фторопластовой прокладкой 5 и закрытому предохранительным колпачком 6. Датчик герметизируется резиновой прокладкой 7, зажимаемой гайкой 8. Масса датчика т = 100 г, чувствительность и частотный диапазон при входном сопротивлении усилителя 2 МОм равны S = 20 мВ/(м/с2) и f = 20 — 500 Гц, собственная емкость датчика 3400 пФ. Пьезоэлектрические преобразователи с использованием обратного пьезозффекта. Вследствие обратного пьезоэффекта пьезоэлементы деформируются под действием электрического поля. Относительные деформации сжатия и растяжения очень малы и близки по величине к температурным деформациям, поэтому в преобразователях напряжения в перемещение используются обычно изгибные пьезоэлементы. Схематическая конструкция такого преобразователя показана на рис. (3-3, в). При действии напряжения U одна из пластин сокращается по длине, другая расширяется и в результате биморфная пластина изгибается; под действием температуры обе пластины деформируются одинаково и изгиба не происходит. Прогиб конца биморфного элемента из керамики ЦТС с размерами 40 X 40 X 1 мм при напряжении 400 В составляет 0,323 мм, такой прогиб соответствует действию на свободном конце балки нагрузки около 0,5 Н.
Рис, 3-11
Заключение В ходе данной выполненной работы мы рассмотрели основные свойства ультразвука, такие как природа и получение ультразвуковых колебаний, типы и скорость ультразвуковых волн, распространение ультразвука, методы ультразвуковой дефектоскопии и их применение. Также были рассмотрены основные типыпреобразователей, их классификация, основные серийные преобразователи, cпециальные преобразователи и контактные среды, электромагнитные ультразвуковые преобразователи и технология изготовления преобразователей. Были изучены физические основы и область применения пьезоэлектрических преобразователей.
Контрольные вопросы
|
||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 171; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.188.188.152 (0.009 с.) |


 . При синусоидальной силе f=Fmsinωt мгновенное значение тока i = dQ/dt= d(dnFmsinωt)/dt. Таким образом, I=jωd11F и
. При синусоидальной силе f=Fmsinωt мгновенное значение тока i = dQ/dt= d(dnFmsinωt)/dt. Таким образом, I=jωd11F и