Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Разработка математической модели кузова вагонаСодержание книги
Поиск на нашем сайте
Лабораторная работа №1 Цель работы: 1. Разработка математической модели вертикальных колебаний кузова вагона на одноступенчатом рессорном подвешивании с гасителем колебаний сухого трения (сила зависит от загрузки вагона); 2. Исследование собственных и вынужденных колебаний, прогибов подвешивания, влияния жесткости подвешивания, коэффициента относительного трения, массы кузова на интенсивность колебаний. Содержание работы: 1. Разработка математической модели кузова вагона с гасителем колебаний сухого трения; 2. Создание модели кузова вагона с рессорным подвешиванием в программном комплексе MEDYNA; 3. Анализ влияние жесткости подвешивания, коэффициента относительного трения, массы кузова на интенсивность собственных и вынужденных колебаний; 4. Формулирование выводов, их графическая иллюстрация; 5. Оформление отчета. Введение Плавное движение вагонов по пути с реальными неровностями обеспечивается благодаря системе рессорного подвешивания, состоящей из упругих элементов и гасителей колебаний. Рессоры обычно размещают между кузовом и колесными парами. Возникающие при движении вагона в составе поезда динамические силы, отклонения от положения равновесия, инерционные перегрузки, которые действуют на пассажиров и грузы, являются следствием колебательных процессов и других видов неравномерного движения инерционных масс, составляющих рассматриваемую механическую систему. Целью изучения колебаний вагона являются выяснение физической природы и причин, их вызывающих, установление допустимого уровня порождаемых ими динамических воздействий. Нелинейное сопротивление демпферов в рессорах обычно применяется в грузовых вагонах, где оно осуществляется за счет работы сил сухого трения в клиновой системе. Клиновой гаситель колебаний, имеющий силы трения, пропорциональные перемещениям, но различной величины для нисходящего и восходящего движений, применён практически во всех тележках грузовых вагонов. Силы трения в этих гасителях возникают при относительном вертикальном и горизонтальном перемещениях трущихся поверхностей. Исходные данные Исходные данные для моделирования колебаний кузова вагона в программном комплексе MEDYNA представлены в таблице 1. Таблица 1 − Исходные данные для моделирования колебаний кузова вагона
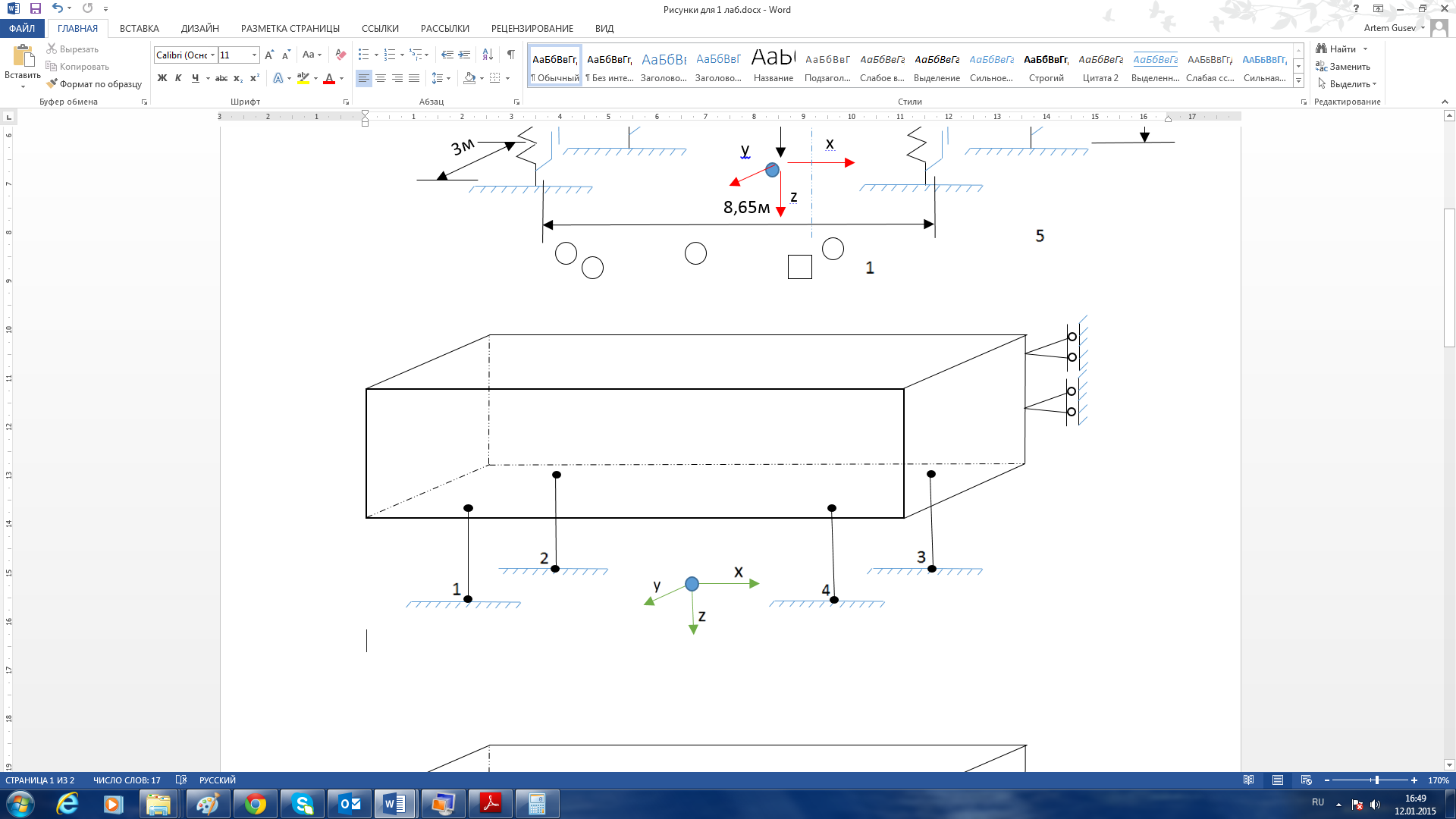
Динамическая модель вагона Задание геометрии многомассовой системы (блог KONFIG) Первоначально в блоке KONFIG-MDEERD задается ускорение свободного падения, в блоке KONFIG-MDEREF - координаты узлов в отсчетной системе координат (значения и расположение представлены в таблице 2 и на рисунке 6). Таблица 2 – Координаты узлов в отсчетной системе координат
Рисунок 6 – Расположение узлов на жестком основании Для конкретизации геометрии твердых тел для каждого из них задается своя, локальная, система координат (блог KONFIG-MDENOM). Ее ориентация (направление осей) обычно совпадает с ориентацией отсчетной системы координат, а положение начала отсчета располагается в центре масс тела (таблица 3). Таблица 3 – Положение начала отсчета локальных систем координат тел модели относительно отсчетной системы координат
В блоке KONFIG-MDEAKO задают степени свобод тел (значения указаны в таблице 4), идентичность с другими телами модели, число узлов на каждом теле и номера узлов, расположенных в центре масс тел. Таблица 4 – Название тел и соответствующие им степени свободы
Далее в локальных системах координат задают узлы, определяющие места крепления элементов связи (блок KONFIG-MDEKNI). Число, название и координаты узлов тела представлены в таблице и на рисунке 7. Таблица 5 – Координаты узлов на кузове вагона
Рисунок 7 – Расположение узлов на кузове вагона В блоке KONFIG-MDESKM задаются массы и массовые моменты инерции тела. Инерционные параметры для вагона представлены в исходных данных (таблица 1). Указываем массу порожнего вагона и соответствующие данной загрузке инерционные характеристики. После завершения ввода инерционных параметров тел в блоке
Рисунок 8 – Описание степеней свободы тел в блоке KONFIG-MDETEP Задание связей и их параметров для описания взаимодействия тел (блок VERBIN) Для задания связей в твердотельной модели указывают их направления, которые определяются номерами узлов связываемых тел (блок VERBIN-MDEBIN). Для связей, обладающих схожими характеристиками, можно задать их идентичность, чтобы избежать повторного ввода параметров. Номера, названия, направления и идентичность связей (в соответствии с нумерацией, принятой в MEDYNA) для вагона на одноступенчатом рессорном подвешивании отражены в таблице 6. Таблица 6 – Номера, названия и направления связей в модели
По окончании блока VERBIN-MDEBIN программой автоматически генерируются таблица исходных векторов зазоров в связях (таблица 7), для каждой связи выводится модуль и направление вектора перемещения (блок VERBIN-MNOMRE). Таблица 7 – Модули и направления векторов перемещения в связях
Далее в блоке VERBIN-MDEKET задаются типы элементов связей и их параметры. В данном случае нелинейный элемент №296. Опция задания ориентации вспомогательной системы координат для данного элемента связи отсутствует. Модуль VERBIN-MDEFAN предназначен для задания номинальных сил и моментов в связях. В данной модели вертикальных колебаний кузова вагона модуль VERBIN-MDEFAN не используется, поэтому его пропускаем. В модуле VERBIN-MDEK 296 задаются параметры элементов связи. Фактор положения условной точки на длине связи указываем 0,5. Обозначаем координатные оси, по которым действуют силовые факторы (вертикальная ось): 0 0 1 Жесткость для одного рессорного подвешивания указываем равной 4 МН, что соответствует исходным данным (таблица 1). В модуле VERBIN-MDEK 296 указываем характеристики рессорного подвешивания в таком же порядке, в каком описан элемент №296 в пункте 4. Параметры 1-6: 4.е6 100.е6 0.4 2. 3. 3. Параметры 7-10: 2. 1.001 0. 0.0 Задание входных возмущений в телах, связях (блог ANREG) Чтобы система пришла в движение, начала колебаться, необходимо внешнее воздействие. Для анализа собственных колебаний, внешнее воздействие осуществляется в виде единичного силового импульса, по результатам которого происходят затухающие колебания. Для анализа вынужденных колебаний, внешнее воздействие осуществляется в виде периодически повторяющегося силового импульса (синусоидальное возмущение). Окно модуля ANREG изображено на рисунке 9.
Рисунок 9 – Модуль ANREG В разделе ANREG-MDEEXT указывается вид возмущения (сила или момент), к каким узлам оно прикладывается и в каком направлении действует возмущение. Ввод данных производится в следующей последовательности: 1. Имя (16 символов) 2. Номер тела 3. Номер узла 4. Опция выбора системы координат (0=локальная, 1=отсчетная) 5.Тип воздействия (1=сила, 2=момент) 6. Выбор координатных осей, по которым направлено воздействие ‘Excitation’ 1 1 0 1 0.0 0.0 1.0 В разделе ANREG-MDEANR выбираются типы возмущений: 1. Имя (16 символов) 2. Постоянный вход (только силы и моменты) 3. Тип возмущения 0=нет 1=гармоническое 2=функция спектральной плотности 3=цветной шум (формирующий фильтр) 4=функция времени 5=функция расстояния ‘Free oscillations’ 0.0 4 Затем необходимо выбрать из выпадающего списка («-1»=вывести список всех существующих функций) номер возмущающей функции. Для моделирования свободных колебаний выбираем прямоугольный импульс (№3), функция которого U(T)=0. для T<A2 и T>A3 U(T)=A1 иначе А1=300 Вводим данные в следующем порядке: 300.e3 2. 2.1 Графическое представление прямоугольного импульса изображено на рисунке 10.
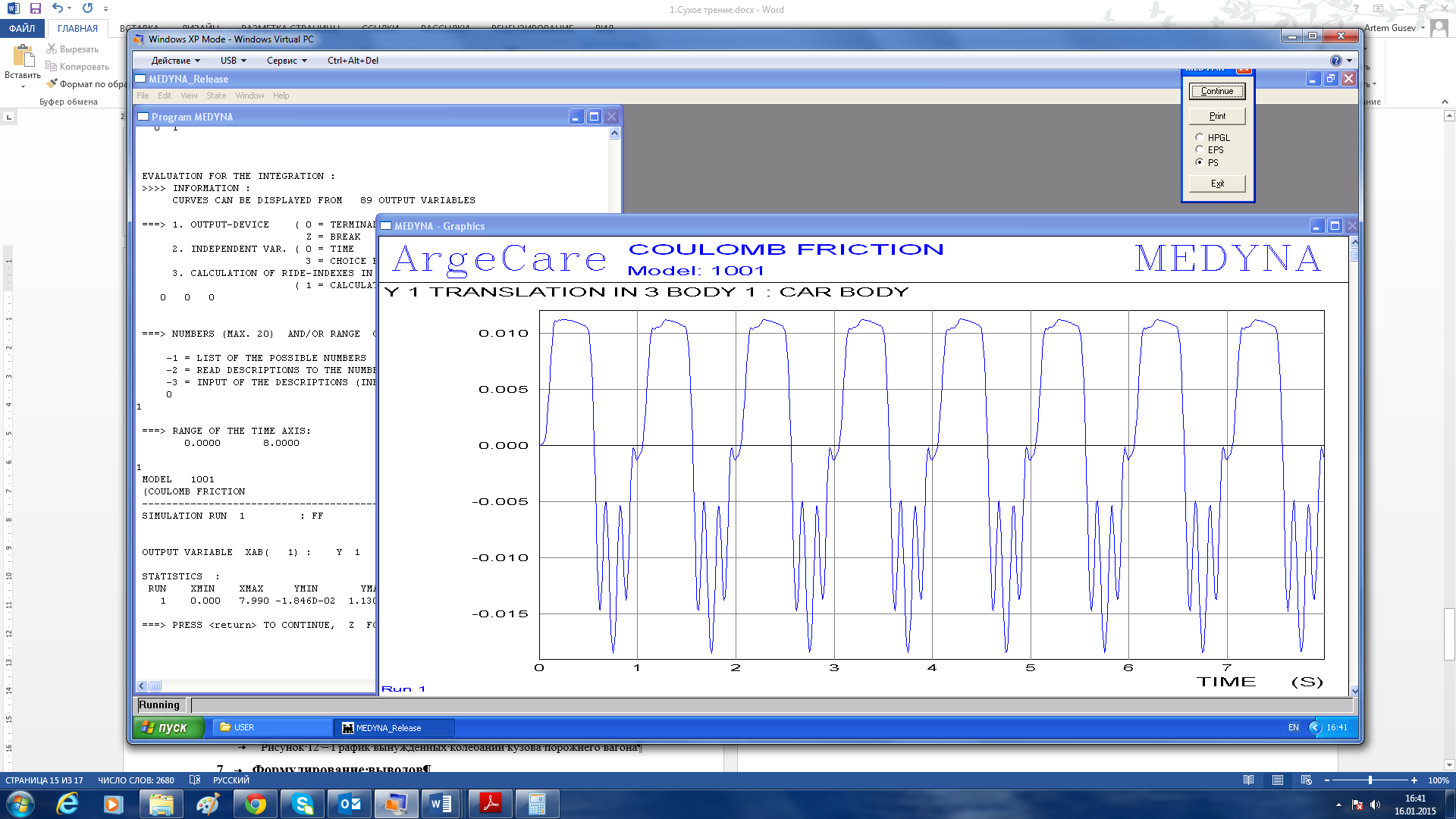
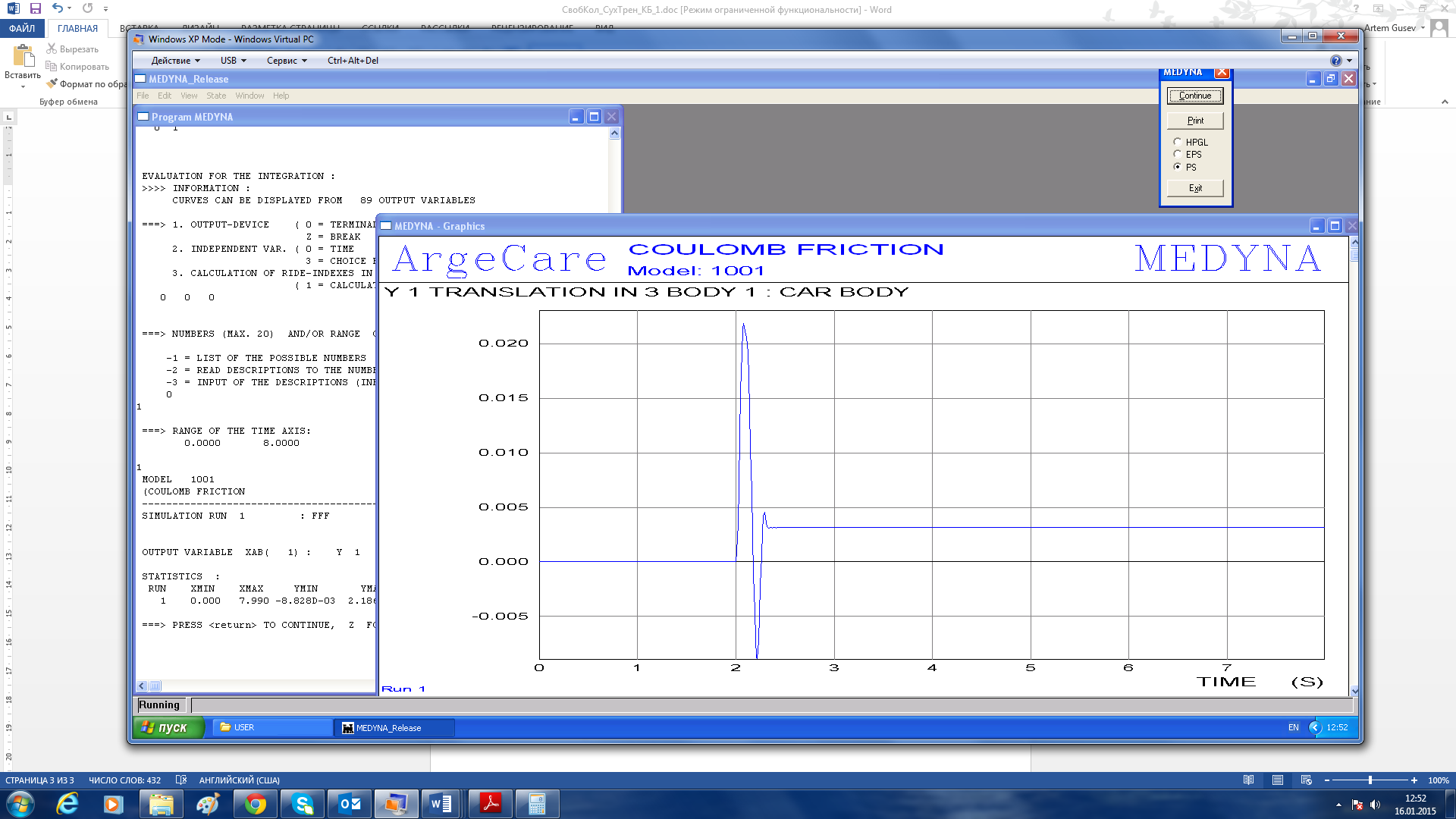
Рисунок 10 – Прямоугольный импульс Для моделирования вынужденных колебаний выбираем синусоидальное возмущение (№1), функция которого U(T)=A1*SIN(A2*T+A3), где А1=300 Вводим данные в следующем порядке: 300.e3 6.28 0. Примеры получения результатов собственных и вынужденных колебаний из динамической модели программного комплекса MEDYNA График свободных колебаний кузова порожнего вагона, полученный при выведении системы из состояния покоя силовым импульсом величиной A1=300 кН, представлен на рисунке 11.
Рисунок 11 – График собственных колебаний кузова порожнего вагона За четверть периода кузов будет находиться в точке находящейся от положения равновесия на расстоянии +а или –а (рисунок 12).
Рисунок 12 – Восходящая и нисходящая ветви траектории кузова Процесс свободных колебаний затухнет, как правило, не в положении равновесия, а в смещенном состоянии, когда График вынужденных колебаний кузова порожнего вагона, полученный при наложении на систему синусоидального импульса величиной A1=300 кН с циклической частотой ω=6,28 рад/сек представлен на рисунке 13.
Рисунок 13 – График вынужденных колебаний кузова порожнего вагона Формулирование выводов Проанализировать влияния жесткости подвешивания, коэффициента относительного трения гасителя колебаний и загруженности вагона на собственные и вынужденные колебания кузова, (данные для анализа представлены в таблицах 8-11). Дополнительно произвести оценку влияния циклической частоты вынужденных колебаний ω на характер колебательного процесса. Обратить внимание на прогибы подвешивания. Привести в выводах графики колебаний кузова вагона, полученные в программном комплексе MEDYNA. Таблица 8 – Изменение жесткости подвешивания
Таблица 9 – Изменение коэффициента относительного трения
Таблица 10 – Влияние загруженности вагона на колебательный процесс
Таблица 11 – Изменение циклической частоты
Лабораторная работа №1 Цель работы: 1. Разработка математической модели вертикальных колебаний кузова вагона на одноступенчатом рессорном подвешивании с гасителем колебаний сухого трения (сила зависит от загрузки вагона); 2. Исследование собственных и вынужденных колебаний, прогибов подвешивания, влияния жесткости подвешивания, коэффициента относительного трения, массы кузова на интенсивность колебаний. Содержание работы: 1. Разработка математической модели кузова вагона с гасителем колебаний сухого трения; 2. Создание модели кузова вагона с рессорным подвешиванием в программном комплексе MEDYNA; 3. Анализ влияние жесткости подвешивания, коэффициента относительного трения, массы кузова на интенсивность собственных и вынужденных колебаний; 4. Формулирование выводов, их графическая иллюстрация; 5. Оформление отчета. Введение Плавное движение вагонов по пути с реальными неровностями обеспечивается благодаря системе рессорного подвешивания, состоящей из упругих элементов и гасителей колебаний. Рессоры обычно размещают между кузовом и колесными парами. Возникающие при движении вагона в составе поезда динамические силы, отклонения от положения равновесия, инерционные перегрузки, которые действуют на пассажиров и грузы, являются следствием колебательных процессов и других видов неравномерного движения инерционных масс, составляющих рассматриваемую механическую систему. Целью изучения колебаний вагона являются выяснение физической природы и причин, их вызывающих, установление допустимого уровня порождаемых ими динамических воздействий. Нелинейное сопротивление демпферов в рессорах обычно применяется в грузовых вагонах, где оно осуществляется за счет работы сил сухого трения в клиновой системе. Клиновой гаситель колебаний, имеющий силы трения, пропорциональные перемещениям, но различной величины для нисходящего и восходящего движений, применён практически во всех тележках грузовых вагонов. Силы трения в этих гасителях возникают при относительном вертикальном и горизонтальном перемещениях трущихся поверхностей. Исходные данные Исходные данные для моделирования колебаний кузова вагона в программном комплексе MEDYNA представлены в таблице 1. Таблица 1 − Исходные данные для моделирования колебаний кузова вагона
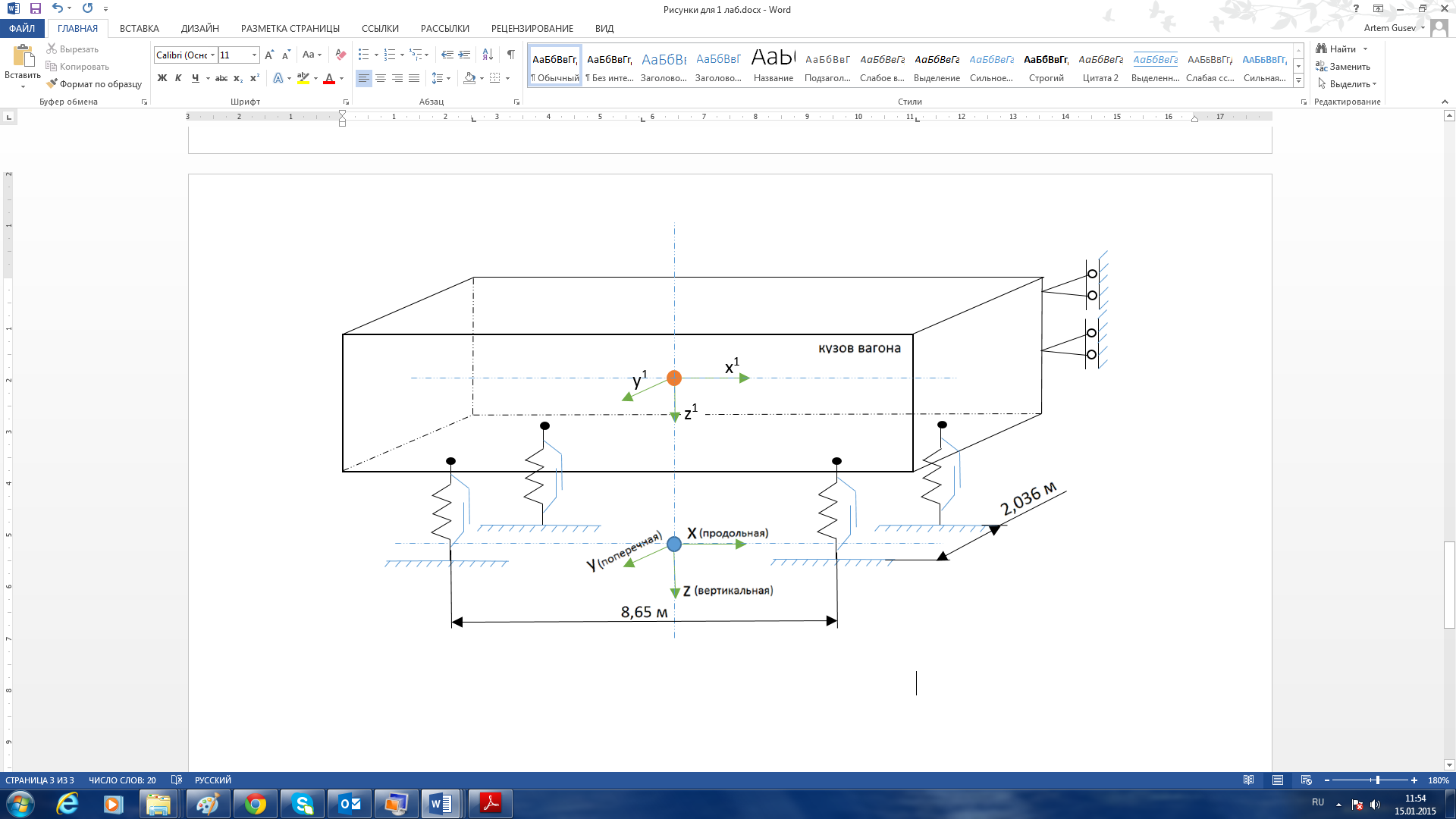
Разработка математической модели кузова вагона В данной работе рассматривается случай колебания кузова вагона, рессорное подвешивание которого представлено упругими элементами с гасителями колебаний сухого трения. При разработке модели принимают, что отсчетная система координат (тело «0») находится на жестком основании в центре продольной и поперечной симметрий вагона. Тела, моделирующие вагон, совершают колебания относительно отсчетной системы координат. Ось Х отсчетной системы координат направлена вдоль оси пути по направлению движения вагона, ось Y – перпендикулярно вправо, ось Z – перпендикулярно вниз. Необходимо обратить внимание на то, что в программном комплексе MEDYNA обозначение системы координат (x, y, z) заменено на эквивалентное цифровое (1, 2, 3). Математическая модель кузова вагона представлена на рисунке 1.
Рисунок 1 – Математическая модель кузова вагона на рессорном подвешивании с гасителями колебаний сухого трения Для конкретизации геометрии твердых тел (в данном случае одно тело – кузов вагона) для каждого из них задается своя, локальная (x1, y1, z1), система координат. Ее ориентация (направление осей) обычно совпадает с ориентацией отсчетной системы координат, а положение начала отсчета располагается в центре масс тела. Математическая модель кузова вагона с геометрическими параметрами и обозначением отсчетной и локальной систем координат представлена на рисунке 2.
Рисунок 2 – Геометрические параметры математической модели Так как в работе рассматривается модель вертикальных колебаний кузова, то на перемещения в продольном и поперечном направлениях, а также на повороты относительно любых осей накладываются ограничения.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 454; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.50.71 (0.01 с.) |





 Н, А2=2 сек, А3=2,1 сек.
Н, А2=2 сек, А3=2,1 сек.
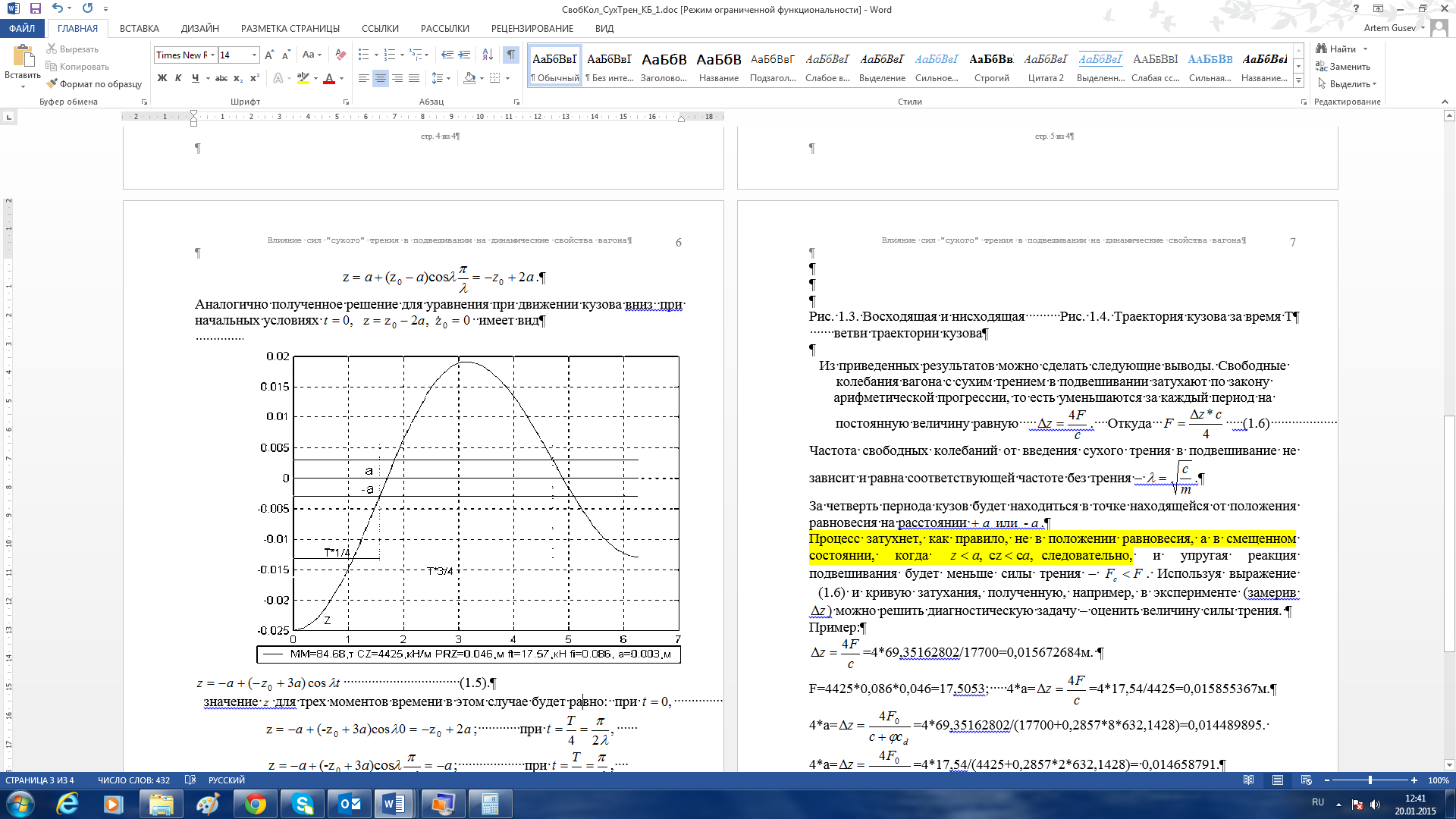
 ,
,  следовательно, и упругая реакция подвешивания будет меньше силы трения – Fc<F.
следовательно, и упругая реакция подвешивания будет меньше силы трения – Fc<F.