Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Дифференциальный режим и контроль целостности
В основе метода дифференциальной навигации лежит относительное постоянство значительной части погрешностей СРНС во времени и в пространстве. Необходимость использования дифференциального режима СРНС определяется стремлением удовлетворить наиболее жестким требованиям навигационного обеспечения таких задач, как посадка воздушных судов по категориям ICAO.
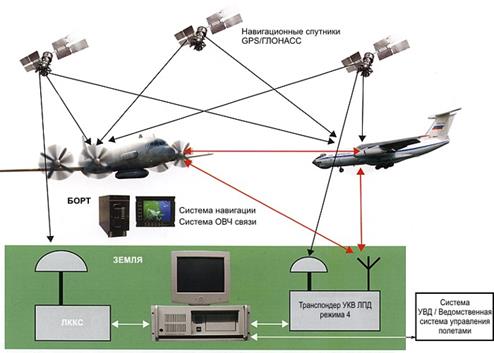
Рис.5.8. Взаимодействие СРНС в дифференциальном режиме Точная посадочная спутниковая система реализована на основе применения дополнительной наземной контрольно – корректирующей станции, размещаемой в районе посадки. Такая контрольно – корректирующая станция, установленная в фиксированной точке с известными координатами, при помощи аппаратуры СРНС получает координатную информацию, которую сравнивает с истинными координатами станции. В результате вычисляются ошибки определения координат СРНС. Полученные таким образом дифференциальные поправки по радиоканалу ОВЧ ЛПД режима 4 (рис.5.8) передаются потребителям, которые могут скорректировать свои измерения. Возможно несколько реализаций идеи дифференциальной СРНС. Вариант 1. Приемник помещается в известной точке, и измеряются ошибки определения координат, полученных при помощи СРНС. Данная информация передается на пользовательский приемник. Недостатки этой реализации ДСРНС состоят в том, что достоверность поправок ухудшается с увеличением расстояния между корректирующей станцией и приемником пользователя, причем оба приемника (на станции и у потребителя) должны использовать один и тот же набор рабочих НИСЗ. Учитывая локальность применения ДСРНС, можно утверждать, что вероятность выбора различных созвездий НИСЗ приемником СРНС на корректирующей станции и на борту ВС невелика, так как алгоритмы выбора оптимального созвездия на обоих приемниках будут практически одинаковы. Однако несовпадение созвездий все-таки возможно. Вариант 2. Приемник располагается в известной точке, определяются ошибки в псевдодальностях до всех видимых НИСЗ и передаются пользователям. При таком подходе пользователь может использовать любую группу НИСЗ, в том числе и не совпадающую с используемой и приемником СРНС на корректирующей станции.
Вариант 3. Наземная станция выступает в роли псевдоспутника. Вычисляются отклонения в псевдодальностях до всех НИСЗ, и эта информация включается в состав сообщения, передаваемого данным псевдоспутником. Пользователь получает эти данные как часть регулярной навигационной информации и соответствующим образом корректирует измерения. Все три варианта реализации ДСРНС требуют наличия линии передачи данных между корректирующей станцией и пользовательским приемником. Контроль целостности СРНС осуществляется посредством самоконтроля бортовых систем НКА, контроля качества излучаемых НКА сигналов, а также передаваемой информации. При этом должна поддерживаться достоверность навигационных определений на требуемом уровне, а потребитель должен своевременно информироваться о возможных нарушениях. Контроль целостности может осуществляться на земле в стационарных условиях и на борту потребителя. Если он осуществляется непосредственно в приемнике на основе данных только СРНС, то имеет место операция "автономного контроля целостности в приемнике" (RAIM). При использовании на борту судна данных других систем может осуществляться бортовой автономный контроль целостности (САIМ). В авиации чаще всего используется сокращение и термин AAIM (Airborne Autonomous Integrity Monitoring). Контроль целостности проводится на основе обработки измерений с использованием специально разрабатываемых алгоритмов, имеющих в своей основе методы статистической теории решений. Реализация внешнего по отношению к потребителю и НКА СРНС контроля целостности осуществляется посредством создания бортовых, наземных и космических функциональных дополнений использующих дифференциальный режим СРНС. Условно дифференциальные подсистемы (ДПС) подразделяются на широкозонные (ШДПС), региональные (РДПС) и локальные (ЛДПС). Основой ШДПС (WAAS, EGNOS, MSAS) является сеть широкозонных контрольных станций (ШКС), информация от которых передается на широкозонные главные станции (ШГС) для совместной обработки с целью выработки общих поправок и сигналов целостности. Радиус рабочей зоны ШДПС порядка 5000-6000 км.
Выработанные на ШГС сигналы целостности и корректирующие поправки передаются через наземные станции передачи данных (НСПД) на геостационарный КА (ГКА) типа Инмарсат, Артемис или МСАТ для последующей ретрансляции потребителям. Эти ГКА используются также в качестве дополнительных навигационных точек для дополнительных дальномерных измерений. Региональные ДПС предназначены для навигационного обеспечения отдельных регионов континента, моря, океана. Диаметр рабочей зоны может составлять от 400-500 до 2000 и более км. РДПС могут иметь в своем составе одну или несколько ККС, а также соответствующие средства передачи корректирующей информации и сигналов целостности. Эта информация вырабатывается на главной станции или ККС. Локальные ДПС имеют максимальные дальности действия от ККС или передатчика ЛПД до 50-200 км. ЛДПС обычно включают одну ККС (имеются варианты с несколькими ККС), аппаратуру управления и контроля (в том числе, контроля целостности) и средства передачи данных. При использовании дифференциального режима СРНС горизонтальные ошибки определения места не превосходят 1 м в 99% случаев.
|
|||||||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 583; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.195.110 (0.006 с.) |