Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Приницип автономности (связное регулирование)Содержание книги
Поиск на нашем сайте
В системах связного регулирования применяются дополнительные информационные каналы, благодаря которым внутренние перекрестные связи компенсируются внешними устройствами Принцип формулируется: путем введения дополнительных внешних связей между РО и соответствующей настройкой этих связей добиваются, чтобы регулирующее воздействие каждого регулятора оказывало влияние только на свою регулирующую величину и практически не влияло на остальные величины. В результате объект с несколькими взаимно связными управляющими величинами искусственно превращается в объект с независимыми (автономными) друг от друга регулирующими величинами
Введем внешнее корректирующее устройство Þ
Если
т. е.
Т. е. исходный ОУ заменяется эквивалентным. Полученное условие совпадает с условием абсолютной компенсации возмущений, т. е. оно эквивалентно условию абсолютной инвариантности. СУ в этом случае имеет следующую структуру:
Расчет: определяются настроечные параметры 1-го и 2-го регулятора, обеспечивающие заданный запас устойчивости (например, условие min/max). В результате находятся wрез контуров регулирования. параметры и настройки дополнительной корректирующей связи
Т. к. во всем диапазоне частот выполнение равенства не удается, Þ решается задача таким образом, чтобы выполнялась на частотах w0 = 0 и w = wрез (2 – го контура)
Для данного объекта ККС = 0, т. к. отсутствуют перекрестные связи Конструктивно дополнительная корректирующая связь может быть реализована и другим способом. 1 способ:
2. способ: измеряется сигнал по рассогласованию В этом случае
Если ОУ – объект со взаимносвязными регулируемыми величинами, т. е. появляется W 12, Þ для компенсации влияния, вводим W Д12. Расчет системы и выбор динамических связей осуществляется по аналогии с предыдущим, т. е. Определяются настроечные параметры 1-го и 2-го регулятора, обеспечивающие заданный запас устойчивости (например, условие min/max). В результате находятся wрез контуров регулирования. параметры и настройки дополнительной корректирующей связи
обеспечивающей принцип автономности на частотах w0 = 0 и w = wрез (1 и 2 – го контуров). Характерная особенность объектов со взаимносвязными регулируемыми величинами – наличие доп. замкнутых на себя контуров преобразования сигнала Система будет не устойчива, если хотя бы один из контуров будет не устойчивым
При автоматизации сложных ОУ приходится оценивать интенсивность взаимодействия подсистем. Оценка интенсивности взаимодействия подсистем позволяет систематизировать процесс синтеза многосвязных СУ. В 60-х гг. англ. инженер Бристоль предложил оценивать интенсивность взаимодействия на основании анализа коэффициентов чувствительности выходных координат ОУ к действию управляющего воздействия в РСУ и ЗСУ. Эта оценка позволяет получить общую меру связности в статике. Эта мера связности называется матрицей Бристоля.
Матрица Бристоля – таблица, составленная из коэффициентов чувствительности системы, в которой по определению коэффициенты матрицы
Матрица позволяет использовать формальные методы анализа системы. ВОПРОС №15 Регулирование расхода. Необходимость регулирования расхода возникает при автоматизации практически любого непрерывного процесса. АСР расхода, предназначенные для стабилизации возмущений по материальным потокам, являются неотъемлемой частью разомкнутых систем автоматизации технологических процессов. Часто АСР расхода используют как внутренние контуры в каскадных системах регулирования других параметров. Для обеспечения заданного состава смеси или для поддержания материального и теплового балансов в аппарате применяют системы регулирования соотношения расходов нескольких веществ в одноконтурных или каскадных АСР.
На рис. 8.1. дана принципиальная схема объекта при регулировании расхода. Обычно таким объектом является участок трубопровода между точкой измерения расхода (например, местом установки сужающего устройства 1) и регулирующим органом 2. Длина этого участка определяется правилами установки сужающих устройств и регулирующих органов и составляет обычно несколько метров. Динамика канала «расход вещества через клапан — расход вещества через расходомер» приближенно описывается апериодическим звеном первого порядка с чистым запаздыванием. Время чистого запаздывания обычно составляет доли секунд для газа и несколько секунд — для жидкости; значение постоянной времени — несколько секунд. Ввиду малой инерционности объекта регулирования особые требования предъявляются к выбору средств автоматизации и методов расчета АСР. В частности, в промышленных установках инерционность цепей контроля и регулирования расхода становится соизмеримой с инерционностью объекта, и ее следует учитывать при расчете систем регулирования.
Вследствие малой инерционности объекта рабочая частота может оказаться выше максимальной, ограничивающей область нормальной работы промышленного регулятора, в пределах которой реализуются стандартные законы регулирования. За пределами этой области динамические характеристики регуляторов отличаются от стандартных, вследствие чего требуется введение поправок на рабочие настройки с учетом фактических законов регулирования. Выбор законов регулирования диктуется обычно требуемым качеством переходных процессов. Для регулирования расхода без статической погрешности в одноконтурных АСР применяют ПИ-регуляторы. Если АСР расхода является внутренним контуром в каскадной системе регулирования, регулятор расхода может осуществлять П-закон регулирования. При наличии высокочастотных помех в сигнале расхода применение регуляторов с дифференциальными составляющими в законе регулирования без предварительного сглаживания сигнала может привести к неустойчивой работе системы. Поэтому в промышленных АСР расхода применение ПД- или ПИД-регуляторов не рекомендуется. В системах регулирования расхода применяют один из трех способов изменения расхода: дросселирование потока вещества через регулирующий орган, устанавливаемый на трубопроводе (клапан, шибер, заслонка); изменение напора в трубопроводе с помощью регулируемого источника энергии (например, изменением числа оборотов двигателя насоса или угла поворота лопастей вентилятора); байпасирование, т. е. переброс избытка вещества из основного трубопровода в обводную линию.
Регулирование расхода после центробежного насоса осуществляется регулирующим клапаном, устанавливаемым на нагнетательном трубопроводе (рис. 8.3,а). Если для перекачивания жидкости используют поршневой насос, применение подобной АСР недопустимо, так как при работе регулятора клапан может закрыться полностью, что приведет к разрыву трубопровода. В этом случае для регулирования расхода используют байпасирование потока (рис. 8.3,6). Регулирование соотношения расходов двух веществ можно осуществлять по одной из трех схем, описанных ниже.
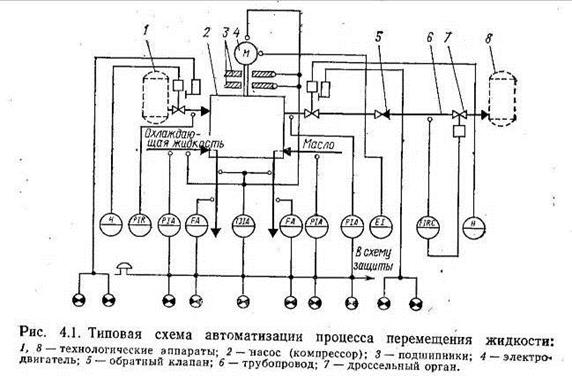
1. 2. При заданном «ведущем» расходе кроме АСР соотношения применяют и АСР «ведущего» расхода (рис. 8.5,в). При такой схеме в случае изменения задания по расходу G1 автоматически изменится и расход G2 (в заданном соотношении с G1). 3. АСР соотношения расходов является внутренним контуром в каскадной системе регулирования третьего технологического параметра у (например, температуры в аппарате). ВОПРОС №16 Типовое решение автоматизации обычно разрабатывается для Ж и Г. Т. к. при скоростях движения газа меньших скорости звука движение Ж или Г характеризуется одними и теми же законами. В качестве ОУ обычно рассматривают трубопровод, по которому транспортируется Ж от одного технологического агрегата к другому. Транспортировка осуществляется насосом либо компрессором. Управляемой величиной является расход жидкости. Процесс перемещения Ж является вспомогательным, т. е. его надо проводить так, чтобы обеспечить эффективный режим работы основного процесса. В связи с этим расход должен поддерживаться на определенном и чаще всего постоянном уровне. Поэтому цель управления процессом перемещения – поддержание постоянства расхода Ж в трубопроводе. Анализ ОУ с целью выявления возмущающих и управляющего воздействий можно провести, рассматривая основные факторы, влияющие на величину расхода.
G – массовый расход, W – скорость, F – сечение, r - плотность
D р – перепад давления, m - динамическая вязкость Из этих показателей m, r ≈ const, поэтому Поэтому D р – движущая сила процесса перемещения. D р зависит от характеристик насоса (компрессора), давления в технологических аппаратах и от общего гидравлического сопротивления трубопровода. Давление определяется технологическим режимом, поэтому колебания давления в аппарате – возмущения. Характеристики насоса можно либо целенаправленно менять, либо в процессе нормального его функционирования они стабильны. Общее гидравлическое сопротивление зависит от многих факторов: геометрия трубопровода, состояние внутренней поверхности трубопровода, но его можно стабилизировать, если в трубопровод поместить дросселирующий орган (ДО), с помощью которого можно изменять величину гидравлического сопротивления. В качестве управляющего воздействия используется целенаправленное изменение гидравлического сопротивления, путем изменения положения ДО (основная проблема - энергозатраты). Рассмотрим типовую схему автоматизации. Она должна обеспечить поддержание нормального режима, пуск, останов, наладку системы.
Принципиальный недостаток такой схемы – при необходимости получения небольших расходов жидкости в течении длительного периода времени происходят большие затраты энергии Метод дросселирования подходит в таком виде только для машин центробежного действия Если Ж не сжимается, а насос – объемного действия, то изменение сопротивления на нагнетании не позволяет изменять величину расхода. В насосах объемного действия регулирование расхода осуществляется либо изменением числа оборотов (шестеренчатые насосы), либо байпассированием хода поршня (поршневые насосы)
В центробежных насосах зависимость развиваемого напора от величины объемного расхода имеет следующий вид
Конструктивно эта характеристика может меняться в зависимости от числа оборотов рабочего колеса Гидравлическая мощность = развиваемое давление × расход = const
Энергосберегающие технологии предполагают более рациональное использование всех видов энергии Анализ показал, что > 52% всей э/энергии, потребляемой в Европе идет на преобразование в механическую энергию, посредством самого массового нерегулируемого э/привода, т. е. короткозамкнутый АД. При этом затраты э/энергии в 5 раз > стоимость э/привода за период эксплуатации, Þ в последнее 10-тилетие произошла модернизация АД массового использования: изменение скорости ротора АД путем изменения частоты – частотное регулирование
Существует 2 типа ПЧ: с непосредственной связью, позволяющие регулировать частоту в диапазоне 0 ÷ 25-32 Hz ПЧ с промежуточным звеном постоянного тока, выполненные на базе инверторов напряжения (0 ÷ неск. 1000 Hz)
Компрессоры · поршневой компрессор объемного действия характеризуется неравномерностью работы (решение – на выходе ресивер, либо увеличение числа цилиндров) · центробежный компрессор
|
||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 254; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.137.13 (0.01 с.) |






 , то
, то 



 и
и 


 Системы регулирования расхода характеризуются двумя особенностями: малой инерционностью собственно объекта регулирования; наличием высокочастотных составляющих в сигнале изменения расхода. Причина возникновения высокочастотных составляющих пульсации давления, которые вызваны работой насосов, или компрессоров, или случайными колебаниями расхода при дросселировании потока через сужающее устройство.
Системы регулирования расхода характеризуются двумя особенностями: малой инерционностью собственно объекта регулирования; наличием высокочастотных составляющих в сигнале изменения расхода. Причина возникновения высокочастотных составляющих пульсации давления, которые вызваны работой насосов, или компрессоров, или случайными колебаниями расхода при дросселировании потока через сужающее устройство. Приближенная оценка чистого запаздывания и постоянных времени отдельных элементов цепи показывает (рис. 8.2), что современные первичные преобразователи расхода, построенные на принципе динамической компенсации, можно рассматривать как усилительные звенья. Исполнительное устройство аппроксимируется апериодическим звеном первого порядка, постоянная времени которого составляет несколько секунд, причем быстродействие исполнительного устройства существенно повышается при использовании позиционеров. Импульсные пневматические линии, связывающие средства контроля и регулирования, аппроксимируются апериодическим звеном первого порядка с чистым запаздыванием, параметры которого определяются длиной линии и лежат в пределах нескольких секунд. При больших расстояниях между элементами цепи необходимо по длине импульсной линии устанавливать дополнительные усилители мощности.
Приближенная оценка чистого запаздывания и постоянных времени отдельных элементов цепи показывает (рис. 8.2), что современные первичные преобразователи расхода, построенные на принципе динамической компенсации, можно рассматривать как усилительные звенья. Исполнительное устройство аппроксимируется апериодическим звеном первого порядка, постоянная времени которого составляет несколько секунд, причем быстродействие исполнительного устройства существенно повышается при использовании позиционеров. Импульсные пневматические линии, связывающие средства контроля и регулирования, аппроксимируются апериодическим звеном первого порядка с чистым запаздыванием, параметры которого определяются длиной линии и лежат в пределах нескольких секунд. При больших расстояниях между элементами цепи необходимо по длине импульсной линии устанавливать дополнительные усилители мощности.

 При незаданной общей производительности расход одного вещества (рис. 8.5,a) G1 называемый «ведущим», может меняться произвольно; второе вещество подается при постоянном соотношении с первым, так что «ведомый» расход равен G1 . Иногда вместо регулятора соотношения используют реле соотношения и обычный регулятор для одной переменной (рис. 8.5,6). Выходной сигнал реле 6, устанавливающего заданный коэффициент соотношения , подается в виде задания регулятору 5, обеспечивающему поддержание «ведомого» расхода.
При незаданной общей производительности расход одного вещества (рис. 8.5,a) G1 называемый «ведущим», может меняться произвольно; второе вещество подается при постоянном соотношении с первым, так что «ведомый» расход равен G1 . Иногда вместо регулятора соотношения используют реле соотношения и обычный регулятор для одной переменной (рис. 8.5,6). Выходной сигнал реле 6, устанавливающего заданный коэффициент соотношения , подается в виде задания регулятору 5, обеспечивающему поддержание «ведомого» расхода. (1)
(1) (2)
(2) (3)
(3)

 , Þ
, Þ