Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тип III. Кривошипно-коромысловый механизм нитепритягивателя швейной машиныСодержание книги
Поиск на нашем сайте
В курсовом проекте необходимо спроектировать кривошипно-коромысловый механизм нитепритягивателя графическим и аналитическим способами, выполнить необходимые расчеты.
3.1. Исходные данные
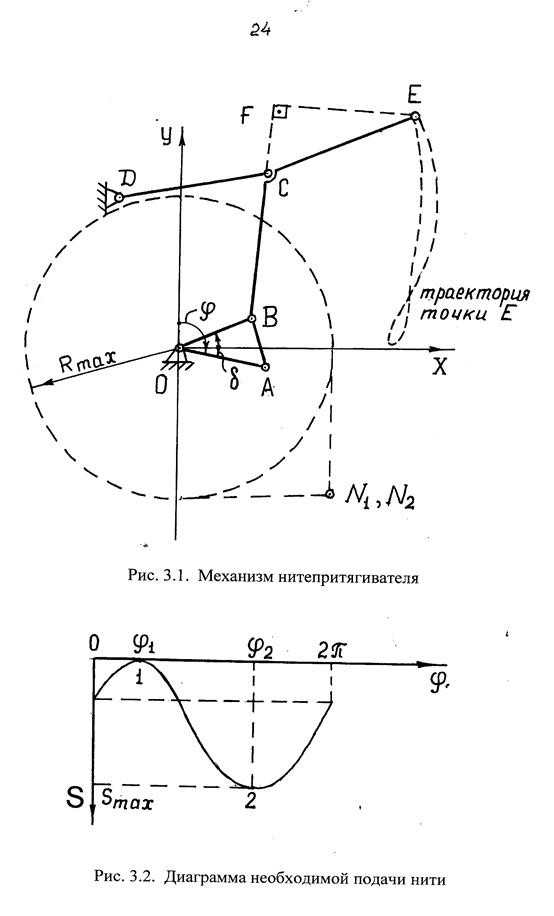
Работа нитепритягивателя характеризуется диаграммой подачи и выбирания нити в зависимости от угла поворота главного вала. Исходными данными для проектирования механизма нитепритягивателя (рис. 3.1) являются: 1. Диаграмма необходимой (заданной) подачи нити (рис. 3.2) S = f (j) где S – длина подаваемой и выбираемой нити; j - угловая координата кривошипа ОА (рис. 3.1). Диаграмма задана в виде значений j и S, сведенных в таблицу 3.1. 2. Rmax – радиус, определяющий конструктивную область, в которой не допускается располагать центр неподвижного шарнира Д коромысла СД, направители N1, N2 и в которой не допускается расположение глазка нитепритягивателя Е (рис. 3.1) на всей траектории его движения. Значения Rmax приведены в последнем столбце таблицы 3.1.
3.2. Содержание и методика выполнения проекта
Проект состоит из расчетно-пояснительной записки и графической части. Расчетно-пояснительная записка включает в себя следующие разделы: - введение; - обзор литературы по механизмам нитепритягивателей швейных машин; -проектирование кривошипно-коромыслового механизма нитепритягивателя; -исследование работы кривошипно-коромыслового механизма нитепритягивателя; - описание кинематической схемы машины; - выводы; - литература; - приложения. В разделе «Введение» необходимо описать цель проекта и представить исходные данные для выполнения проекта. В разделе «Обзор литературы по механизмам нитепритягивателей» необходимо изучить литературные источники, предложенные в данных методических указаниях и выполнить обзор с предоставлением кинематических схем механизмов и полным описанием их устройства, работы и регулировок. Раздел «Проектирование кривошипно-коромыслового механизма нитепритягивателя» выполняется двумя способами: - графическим; - аналитическим. Графический способ выполняется по методике, предложенной в литературе [7]. Плоская схема механизма нитепритягивателя представлена на рис. 3.1. Необходимо определить следующие параметры схемы: ОВ, СВ, СD, СЕ, BE. Исходными данными являются диаграммы подачи и выбирания нити (рис. 3.2, табл. 3.1). При этом проектирование ведется по двум крайним
Таблица 3.1 Исходные данные для построения диаграммы подачи и выбирания нити
положениям механизма: j1 – угол поворота главного вала, соответствующий минимальной подаче нити; j2 – угол поворота главного вала, соответствующий максимальной подаче нити. При определении параметров схемы накладываются следующие ограничения: 1) центр шарнира D должен располагаться на границе или за пределами окружности радиуса Rmax в центре с точкой О
где R0 – максимальный радиус цилиндрической части кривошипа; d – диаметр ступицы коромысла DC в шарнире D; d - допустимый зазор между размерами R0 и d (d» 1 мм); 2) траектория точки Е должна находиться за пределами наружного контура корпуса машины. Это условие относится к нитенаправителям N1, N2; 3) углы передачи в шарнире С должны находиться в следующих пределах
mmin ³ mдоп; mmах £ 180 - mдоп,
mдоп = 30° (для рычажных механизмов).
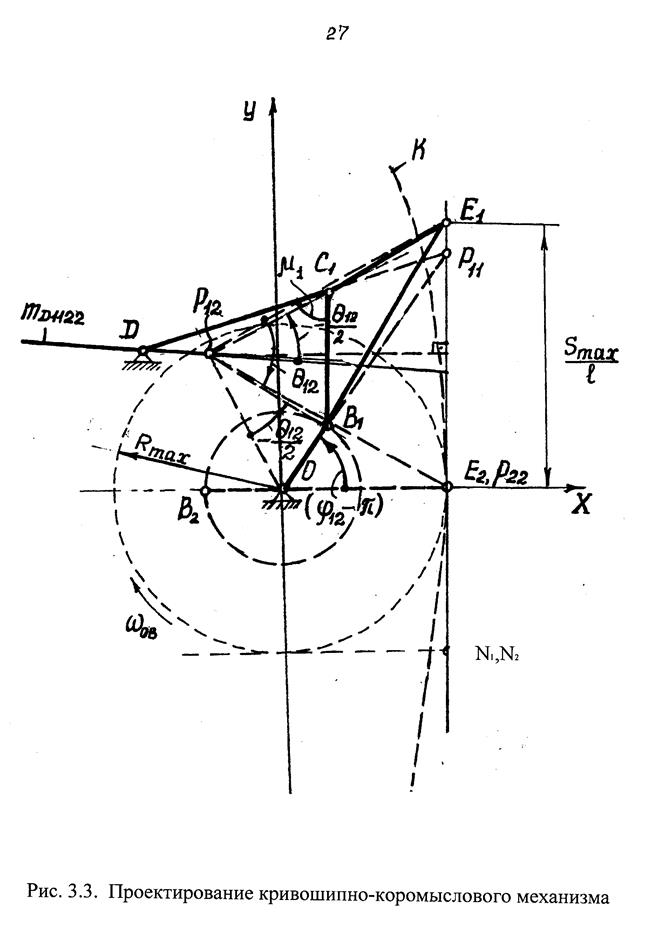
Последовательность построения следующая (рис. 3.3): 1) произвольно выбираем точку 0 и проводим оси координат ОХ и ОУ; 2) из центра О проводим окружность радиусом Rmax и определяем положение нитенаправителей N1, N2 (они совпадают) в точке пересечения двух касательных, проведенных к окружности Rmax в точках Е2 и H. Точка Е2 определяет крайнее нижнее положение глазка нитепритягивателя; 3) проводим прямую через точки N и Е2. На этой прямой от точки Е2 вверх откладываем отрезок, равный 0,5 Smax (Smax - максимальная подача нити) и получаем точку Е1, соответствующую крайнему верхнему положению глазка нитепритягивателя, т.е. минимальной подаче нити; 4) выбираем полюс Р22, совпадающий с точкой Е2. От отрезка ОР22 откладываем против wОВ угол (j12 - p), где j12 – угол поворота ведущего звена от j1 до j2. В пересечении этой прямой с отрезком Е1Е2 определяем полюс Р11; 5) определяем полюс поворота для двух положений нитепритягивателя. Для этого через середину отрезка Е1Е2 проводим перпендикуляр и биссектрису внешнего угла Р11О Р22. На пересечении этих линий и определится точка Р12;
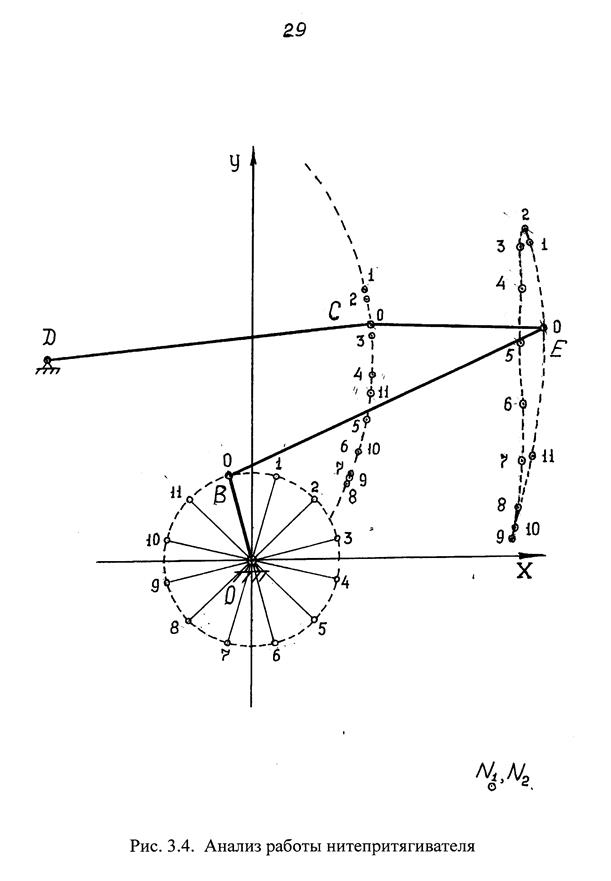
6) определяем угол поворота q12 по формуле: q12 = ÐE1P12Е2 = ÐB1P12B2. 7) исходя из вышеприведенного условия, определяем точки В1 и В2. Для этого через точку Р12 проводим прямую под углом (-q12/2) к прямой Р12О. Точка В1 определится в пересечении этой прямой и отрезка ОР11. Из центра О проводим окружность радиусом ОВ1, в пересечении ее с прямой ОР22 определим точку В2. При этом приближенно выполняется условие Р11Р12 = Р12Р22; ÐР11Р12Р22 = q12; 8) находим положение точки D. Для этого проведем прямую mD11,12, которая является биссектрисой угла Р11Р12Р22. На этой прямой выбираем точку D (желательно вблизи окружности радиуса Rmax); 9) точка С1 определяется в пересечении двух прямых: первая проводится через полюс Р12 под углом (-q12/2) к Р12D; вторая – прямая Р11D; 10) соединив точку D с точкой С1; С1 с Е1, О с В1 получим первое положение механизма; 11) определим значение угла передачи m1. Если его значение не удовлетворяет поставленным условиям, то выбирают новое положение точки D и повторяют построения; 12) методом засечек определяем второе крайнее положение механизма нитепритягивателя и проверяем угол передачи m2; 13) учитывая масштаб построений, определяют длины звеньев ОВ, СВ, СD, СЕ, BE. По определенным размерам механизма нитепритягивателя необходимо построить реальную диаграмму подачи и выбирания нити. Для этого необходимо построить двенадцать положений механизма нитепритягивателя, используя метод засечек и определить траекторию движения глазка нитепритягивателя Е (рис. 3.4). Если точка, соответствующая крайнему нижнему положению глазка нитепритягивателя не войдет в траекторию движения глазка нитепритягивателя, то ее нужно построить дополнительно. Используя построенную траекторию движения глазка нитепритягивателя и известные положения нитенаправителей N1, N2 необходимо определить текущий расход нити по формуле
где
Все значения замеряются на чертеже. По результатам вычислений строится диаграмма реальной подачи нитки, которая совмещается с заданной. Далее следует выполнить аналитическое проектирование кривошипно-
коромыслового нитепритягивателя, подготовив следующие исходные данные: ОВ – длина кривошипа, мм; d - угол между кривошипами механизма вертикальных перемещений иглы и механизма нитепритягивателя (принять 20-22°); хД, уД – координаты шарнира Д, мм; ВС, СЕ – размеры рычага нитепритягивателя, мм; СF – длина перпендикуляра, опущенного из точки Е на продолжение звена СВ при крайнем верхнем положении глазка нитепритягивтеля (рис. 3.1), мм; СД – длина коромысла, мм; хN1, уN1, z N1 = 0 – координаты нитенаправителя N1, мм; хN2, уN2, z N2 = 0 – координаты нитенаправителя N2, мм; mдоп = 30° - допускаемый угол передачи для рычажных механизмов. Данные по диаграмме подачи и выбирания нити выбирают по заданному варианту из таблицы 3.1. Программа расчета находится в зоне d [Students], название программы [Nitepr]. Графический документ полученных результатов расчета на ЭЦВМ должен быть приложен в расчетно-пояснительной записке. По результатам расчетов на ЭЦВМ необходимо построить диаграмму подачи и выбирания нити, совместив ее с двумя предыдущими. Выполнить анализ полученных диаграмм. Раздел «Исследование работы кривошипно-коромыслового механизма нитепритягивателя» включает в себя построение планов скоростей с целью определения скорости движения глазка нитепритягивателя в зависимости от угла поворота главного вала. Необходимо построить планы для пяти положений механизма по варианту, предлагаемому в таблице 3.2. Таблица 3.2 Исходные данные для расчета механизма нитепритягивателя
Полученные результаты вычислений свести в таблицу и проанализировать. Раздел «Описание кинематической схемы машины» предусматривает описание схемы определенного класса машины (по заданию преподавателя). Схему следует выполнять, используя литературные источники [4, 5, 6, 7], лекционный материал и материалы лабораторных работ. В разделе «Выводы» необходимо сделать соответствующие выводы по всем разделам проекта и дать рекомендации. Заканчивается расчетно-пояснительная записка списком использованной литературы и приложениями. Требования к оформлению расчетно-пояснительной записки изложены в разделе 7. Графическая часть проекта включает в себя 3 листа формата А1. Лист 1. Кинематическая схема машины. Лист 2. Графическое проектирование кривошипно-коромыслового механизма нитепритягивателя (0,5 листа). Сборочный чертеж механизма нитепритягивателя (0,5 листа). Лист 3. Графические построения, связанные с исследованием работы механизма нитепритягивателя. Правила оформления графической части проекта изложены в разделе 8.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 483; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.97.1 (0.007 с.) |


 - суммарная длина ветвей нити при верхнем положении глазка нитепритягивателя;
- суммарная длина ветвей нити при верхнем положении глазка нитепритягивателя; - суммарная длина ветвей нитки при любом текущем положении глазка нитепритягивателя.
- суммарная длина ветвей нитки при любом текущем положении глазка нитепритягивателя.