Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
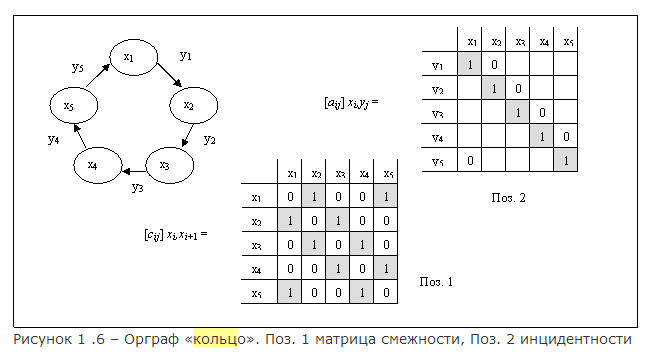
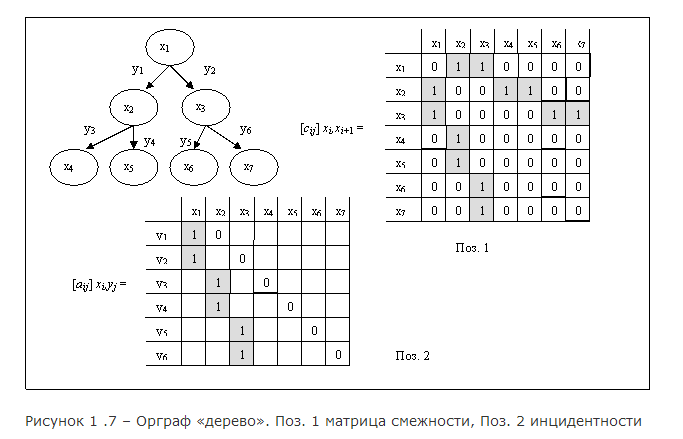
Матрицы смежности и инцидентности.Организация графа. Рассмотрим наиболее показательные условия соотношений множеств Yin { yj } и Yout { yj }, устанавливающие организацию орграфа G. 1. Если для всякой вершины xi∈X орграфа G выполняются условия: | Y in { yj }| = 1 и | Yout { yj }| = 1, то орграф представляет собой структуру в виде кольца. Данные условия обуславливают смежность и связность всех вершин орграфа. 2. Если для всякой вершины xi∈X орграфа G выполняются условия: | Y in { yj } | ≠ ∅ и | Y out { yj }| ≠ ∅, то такой граф является несвязанным. Если данные условия выполняются только для некоторых вершин, то орграф является частично связанным. 3. Если для всякой вершины xi∈X орграфа G выполняются условия: | Y in { yj }| = 1 и | Yout { yj }| ≥ 1, то орграф представляет собой структуру в виде множества ветвей, расходящихся от корня дерева. 4. Если для всякой вершины xi∈X орграфа G выполняются условия: | Y in { yj }| ≥ 1 и | Yout { yj }| = 1, то орграф представляет собой структуру в виде ветвей, сходящихся к корню дерева. В случае 3 и 4 корень дерева может быть представлен в виде кольца. Кроме этого вершины всякой ветви орграфа (SR) не связаны с вершинами иных ветвей. Матрицы смежности и инцидентности. Дополнительно организацию состояний можно отобразить с помощью матриц смежности и инцидентности [ 12-14 ]. Матрица смежности позволяет представить бинарные отношения между вершинами орграфа: [ сij ] xi, xi+ 1 = [ n X n ], где: сij – отношения смежности выражают наличие дуг yj между вершинами орграфа G; n – количество строк и столбцов матрицы смежности (соответствует количеству xi∈G). Отношение смежности сij обозначается «1», если между вершинами xi и xi+ 1существует дуга yj, иначе «0». Матрица инцидентности позволяет представить отношения между количеством входящих и выходящих дуг некоторой вершины xi∈G: [ aij ] xi,yj = [ n X m ], где: aij – отношение инцидентности дуги yj к вершине xi орграфа G; n – количество строк вершин орграфа; m – количество столбцов дуг орграфа. Отношение aij обозначается «1», если дуга yj выходит из вершины xi, иначе «0» (если дуга yj входит в вершину xi). На рисунках 1.6 – 1.8 представлены наиболее характерные варианты организации состояний в виде кольца, дерева (с одинаковым количеством «дочерних» вершин у всякого «родителя»), произвольного орграфа и соответствующие им матрицы смежности и инцидентности.
К 9. 10. 11. · Родовые признаки, по сути, выделяют пространство состояний из множества состояний. · Подмножество видовых признаков состояний выделяет всякое состояние пространства состояний. · Пространство состояний включает в свой состав: 1) подмножество: So начальных состояний; 2) подмножество: St целевых состояний; 3) подмножество: Sс текущих состояний. · В отличие от пространства состояний, пространство поиска -это всегда связная область. · Представление пространства состояний в виде орграфа G= (X { xi } ,Y { yj }) позволяет выделить дополнительные свойства и организацию состояний: 1) если | Y in { yj }| = 1 и | Yout { yj }| = 1, то орграф представляет собой кольцо; 2) если | Yin { yj }| = ∅ и | Yout { yj }| = ∅, то граф является несвязным; 3) если | Y in { yj } | = 1 и | Yout { yj }| ≥ 1, то орграф представляет собой расходящееся от корня дерево; 4) если | Y in { yj }| ≥ 1 и | Y out { yj }| = 1, то орграф представляет собой сходящееся к корню дерево; 5) если | Y in { yj }| ≥ 1 и | Yout { yj }| = ∅, то вершина является терминальной; 6) если | Y in { yj }| =∅ и | Y out { yj }| ≥ 1, то вершина является корневой. · Матрица смежности позволяет представить бинарные отношения между вершинами орграфа. · Матрица инцидентности позволяет представить отношения между количеством входящих и выходящих дуг вершин орграфа Классификация МП. Выделенные задачи позволяют разделить методы поиска на классы. Кроме этого, особенность разделения методов поиска на классы базируется на процедурах генерации, проверки, планирования, режимах поиска, позволяющих достичь того или иного результата в решении задач поиска состояния, расстояния, пути модели распределения и динамики состояний графа.Результат структурирования методов поиска на основе организации процедур и задач поиска представлен на рисунке 2.1 в виде классификации.
Слепые: На основе процедуры «проверка» выделяется класс «простейших эвристических методов поиска». Сущность методов заключается в том, что результаты проверки заносятся в память в виде апостериорной информации о состояниях анализируемого пространства. В дальнейшем эти данные позволяют управлять процедурой генерации. Эвристические методы поиска на основе оценочной функции ориентированы на решение задачи выделения оптимального пути до целевого состояния пространства поиска. Особенностью представителей данного класса методов поиска является явно заданная эвристическая оценка, позволяющая выделить наиболее перспективное текущее решение и тем самым выделить оптимальный путь в пространстве состояний. Организация графа. Рассмотрим наиболее показательные условия соотношений множеств Yin { yj } и Yout { yj }, устанавливающие организацию орграфа G. 1. Если для всякой вершины xi∈X орграфа G выполняются условия: | Y in { yj }| = 1 и | Yout { yj }| = 1, то орграф представляет собой структуру в виде кольца. Данные условия обуславливают смежность и связность всех вершин орграфа. 2. Если для всякой вершины xi∈X орграфа G выполняются условия: | Y in { yj } | ≠ ∅ и | Y out { yj }| ≠ ∅, то такой граф является несвязанным. Если данные условия выполняются только для некоторых вершин, то орграф является частично связанным. 3. Если для всякой вершины xi∈X орграфа G выполняются условия: | Y in { yj }| = 1 и | Yout { yj }| ≥ 1, то орграф представляет собой структуру в виде множества ветвей, расходящихся от корня дерева. 4. Если для всякой вершины xi∈X орграфа G выполняются условия: | Y in { yj }| ≥ 1 и | Yout { yj }| = 1, то орграф представляет собой структуру в виде ветвей, сходящихся к корню дерева. В случае 3 и 4 корень дерева может быть представлен в виде кольца. Кроме этого вершины всякой ветви орграфа (SR) не связаны с вершинами иных ветвей. Матрицы смежности и инцидентности. Дополнительно организацию состояний можно отобразить с помощью матриц смежности и инцидентности [ 12-14 ]. Матрица смежности позволяет представить бинарные отношения между вершинами орграфа: [ сij ] xi, xi+ 1 = [ n X n ], где: сij – отношения смежности выражают наличие дуг yj между вершинами орграфа G; n – количество строк и столбцов матрицы смежности (соответствует количеству xi∈G). Отношение смежности сij обозначается «1», если между вершинами xi и xi+ 1существует дуга yj, иначе «0». Матрица инцидентности позволяет представить отношения между количеством входящих и выходящих дуг некоторой вершины xi∈G: [ aij ] xi,yj = [ n X m ], где: aij – отношение инцидентности дуги yj к вершине xi орграфа G; n – количество строк вершин орграфа; m – количество столбцов дуг орграфа. Отношение aij обозначается «1», если дуга yj выходит из вершины xi, иначе «0» (если дуга yj входит в вершину xi). На рисунках 1.6 – 1.8 представлены наиболее характерные варианты организации состояний в виде кольца, дерева (с одинаковым количеством «дочерних» вершин у всякого «родителя»), произвольного орграфа и соответствующие им матрицы смежности и инцидентности.
К 9. 10. 11. · Родовые признаки, по сути, выделяют пространство состояний из множества состояний. · Подмножество видовых признаков состояний выделяет всякое состояние пространства состояний. · Пространство состояний включает в свой состав: 1) подмножество: So начальных состояний; 2) подмножество: St целевых состояний; 3) подмножество: Sс текущих состояний. · В отличие от пространства состояний, пространство поиска -это всегда связная область. · Представление пространства состояний в виде орграфа G= (X { xi } ,Y { yj }) позволяет выделить дополнительные свойства и организацию состояний: 1) если | Y in { yj }| = 1 и | Yout { yj }| = 1, то орграф представляет собой кольцо; 2) если | Yin { yj }| = ∅ и | Yout { yj }| = ∅, то граф является несвязным; 3) если | Y in { yj } | = 1 и | Yout { yj }| ≥ 1, то орграф представляет собой расходящееся от корня дерево; 4) если | Y in { yj }| ≥ 1 и | Y out { yj }| = 1, то орграф представляет собой сходящееся к корню дерево; 5) если | Y in { yj }| ≥ 1 и | Yout { yj }| = ∅, то вершина является терминальной; 6) если | Y in { yj }| =∅ и | Y out { yj }| ≥ 1, то вершина является корневой. · Матрица смежности позволяет представить бинарные отношения между вершинами орграфа. · Матрица инцидентности позволяет представить отношения между количеством входящих и выходящих дуг вершин орграфа Классификация МП. Выделенные задачи позволяют разделить методы поиска на классы. Кроме этого, особенность разделения методов поиска на классы базируется на процедурах генерации, проверки, планирования, режимах поиска, позволяющих достичь того или иного результата в решении задач поиска состояния, расстояния, пути модели распределения и динамики состояний графа.Результат структурирования методов поиска на основе организации процедур и задач поиска представлен на рисунке 2.1 в виде классификации.
Слепые: На основе процедуры «проверка» выделяется класс «простейших эвристических методов поиска». Сущность методов заключается в том, что результаты проверки заносятся в память в виде апостериорной информации о состояниях анализируемого пространства. В дальнейшем эти данные позволяют управлять процедурой генерации. Эвристические методы поиска на основе оценочной функции ориентированы на решение задачи выделения оптимального пути до целевого состояния пространства поиска. Особенностью представителей данного класса методов поиска является явно заданная эвристическая оценка, позволяющая выделить наиболее перспективное текущее решение и тем самым выделить оптимальный путь в пространстве состояний.
|
||
|
|
Последнее изменение этой страницы: 2016-08-16; просмотров: 1015; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.102 (0.006 с.) |