
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование характеристик типовых динамических звеньевСодержание книги
Поиск на нашем сайте
Цель работы
Целью настоящей работы является изучение временных и частотных характеристик типовых динамических звеньев, а также отработка навыков их экспериментального исследования с использованием ЭВМ.
Теоретическая часть
1.2.1. Дифференциальные уравнения и передаточные функции звеньев и систем
Математическое описание систем автоматического управления (САУ) составляется на основе описания отдельных ее звеньев. Объединяя уравнения звеньев с учетом их взаимосвязей, получают уравнение системы [1-5]. В теории автоматического управления приняты определенные формы записи дифференциальных уравнений линейных звеньев. Дифференциальное уравнение линейного звена (рис. 1.1) в операторной форме имеет вид [2]
где
В уравнении (1.1)
Рис. 1.1. Структурная схема линейного звена САУ
Другой формой записи математического описания звена является запись с помощью передаточной функции. Отношение оператора воздействия к собственному оператору называют передаточной функцией или передаточной функцией в операторной форме
Используя передаточную функцию, уравнение (1.1)можно записать в виде
Наряду с передаточной функцией в операторной форме широко используют передаточную функцию в форме изображений Лапласа. Передаточной функцией или передаточной функцией в форме изображений Лапласа называют отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях. Передаточную функцию в форме изображения Лапласа можно получить из передаточной функции в операторной форме, если в последней сделать подстановку
где
Тогда дифференциальное уравнение в изображениях Лапласа имеет вид
Такое сходство рассмотренных выражений для передаточных функций справедливо только при нулевых начальных условиях. Очень часто при описании оператора дифференцирования и комплексной переменной преобразования Лапласа используется один и тот же символ
1.2.2. Временные характеристики звеньев и систем
Динамические свойства линейных звеньев и систем автоматического управления в целом могут быть описаны уравнениями, как показано выше, и графическими характеристиками. В теории автоматического применяются два типа таких характеристик – временные и частотные. Эти характеристики могут быть сняты экспериментально или построены по уравнению звена [4]. Переходная или временная характеристика (функция) звена
Таким образом
Импульсная переходная (временная) характеристика или функция, называемая еще весовой функцией (функцией веса),
При этом согласно определению
Таким образом
Дельта-функция просто связана с единичной, ступенчатой функцией
Отсюда следует аналогичная связь между весовой и переходной функциями
Временные характеристики на основании преобразования Лапласа связаны также с передаточной функцией звена. Переходная характеристика
импульсная переходная характеристика
1.2.3. Частотные характеристики звеньев и систем
Частотные характеристики описывают установившиеся вынужденные колебания на выходе звена, вызванные гармоническим воздействием на входе [4]. Пусть на вход звена (рис. 1.1) подано гармоническое воздействие
где По окончании переходного процесса на выходе этого звена будут существовать гармонические колебания с той же частотой, что и на входе, но отличающиеся в общем случае по амплитуде и фазе
где При фиксированной амплитуде входных колебаний амплитуда и фаза установившихся колебаний на выходе звена зависит от частоты колебаний. Амплитудной частотной характеристикой (АЧХ) звена называется зависимость отношения амплитуд от частоты
фазовой частотной характеристикой (ФЧХ) звена называется зависимость сдвига фаз от частоты
При исследовании систем автоматического управления амплитудную и фазовую частотные характеристики удобно строить в логарифмических координатах. Это связано с двумя обстоятельствами. Во-первых, в логарифмических координатах характеристики деформируются таким образом, что возникает возможность упрощенно изображать амплитудные частотные характеристики ломаными линиями. Во-вторых, в логарифмическом масштабе амплитудная частотная характеристика последовательной цепочки звеньев равна сумме амплитудных характеристик отдельных звеньев. Амплитудно-частотная характеристика в логарифмических координатах (ЛАХ) строится в виде зависимости
от Обыкновенные амплитудная и фазовая характеристики могут быть объединены в одну характеристику – амплитудно-фазовую частотную характеристику Амплитудно-фазовую частотную характеристику Аналитические выражения для рассмотренных выше частотных характеристик могут быть легко получены по передаточной функции. Если в выражение передаточной функции звена
Тогда справедливы следующие соотношения
Частотные и переходные характеристики взаимосвязаны. Наиболее просто связь между ними определяется для весовой функции с помощью преобразования Фурье
1.2.4. Типовые звенья и их характеристики
В теории автоматического управления вводится понятие типовых звеньев, передаточная функция которых только в определенном частотном диапазоне соответствует реальным звеньям систем управления. Рассматривая характеристики звеньев независимо от их назначения, физического принципа действия, мощности и скорости передаваемых сигналов, можно выделить ряд типовых звеньев, описываемых обыкновенными линейными дифференциальными уравнениями первого и второго порядков [3]: 1) простейшие: пропорциональные, интегрирующие и дифференцирующие звенья; 2) звенья первого порядка: инерционные, инерционно-дифференцирующие, форсирующие и инерционно-форсирующие; 3) звенья второго порядка: колебательные, консервативные, инерционные, форсирующие. Более сложные линейные звенья могут быть сведены к соединению типовых звеньев. Модели типовых звеньев могут быть представлены в виде дифференциальных уравнений, передаточных функций, а также частотных и временных характеристик [2, 3].
Пропорциональное звено. Пропорциональным (безынерционным или статическим) называют звено, которое описывается уравнением
или, что тоже, передаточной функцией
Частотные функции этого звена имеют вид
Временные функции этого звена имеют вид
Примеры реализации пропорциональных звеньев приведены на рис. 1.2.
Рис. 1.2. Примеры реализации пропорциональных звеньев
Интегрирующее звено. Интегрирующим называют звено, которое описывается уравнением
или передаточной функцией
Уравнение такого звена может быть записано также в виде
Частотные функции этого звена имеют вид
Временные функции этого звена имеют вид
Примеры реализации интегрирующих звеньев приведены на рис. 1.3.
Рис. 1.3. Примеры реализации интегрирующих звеньев
Дифференцирующее звено. Дифференцирующим называют звено, которое описывается уравнением
или передаточной функцией
Уравнение такого звена может быть записано также в виде
Частотные функции этого звена имеют вид
Временные функции этого звена имеют вид
Такое звено физически нереализуемо. Апериодическое звено. Апериодическим (инерционным) звеном первого порядка называют звено, которое описывается уравнением
или передаточной функцией
Частотные функции этого звена имеют вид
Временные функции этого звена имеют вид
Примеры реализации инерционных звеньев первого порядка приведены на рис. 1.4.
Рис. 1.4. Примеры реализации инерционных звеньев первого порядка
Форсирующее звено. Форсирующим звеном или форсирующим звеном первого порядка называют звено, которое описывается уравнением
или, что тоже, передаточной функцией
Частотные функции этого звена имеют вид
Временные функции этого звена имеют вид
Это звено не относится к числу элементарных звеньев. Его можно представить в виде параллельно соединенных дифференцирующего и пропорционального звеньев. Такое звено физически нереализуемо. Инерционно-дифференцирующее звено. Инерционно-дифференцирующим или реальным дифференцирующим звеном называют звено, которое описывается уравнением
или передаточной функцией
Частотные функции этого звена имеют вид
Временные функции этого звена имеют вид
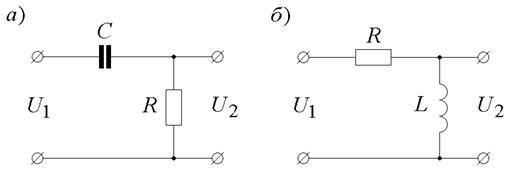
Это звено не относится к числу элементарных звеньев. Его можно представить в виде последовательно соединенных дифференцирующего и инерционного звеньев. Примеры реализации инерционно-дифференцирующих звеньев приведены на рис. 1.5.
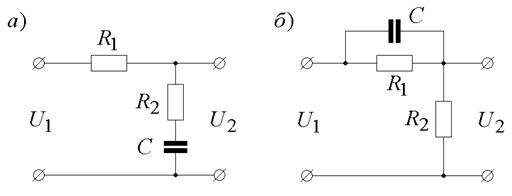
Рис. 1.5. Примеры реализации инерционно-дифференцирующих звеньев Инерционно-форсирующее звено. Инерционно-форсирующим или упругим звеном называют звено, которое описывается уравнением
или передаточной функцией
Существенным параметром этого звена является коэффициент Частотные функции этого звена имеют вид
Временные функции этого звена имеют вид
Это звено не относится к числу элементарных звеньев. Его можно представить в виде последовательно соединенных форсирующего и инерционного звеньев. Примеры реализации инерционно-форсирующих звеньев приведены на рис. 1.6.
Рис. 1.6. Примеры реализации инерционно-форсирующих звеньев
Колебательное, консервативное и апериодическое второго порядка звенья. Звено, которое можно описать уравнением
или в другой форме
где или передаточной функцией
называют колебательным, если Колебательное звено (
Частотные функции этого звена имеют вид
Временные функции этого звена имеют вид
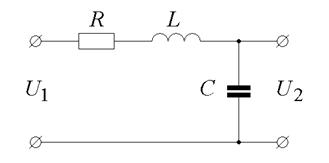
где Пример реализации колебательного звена приведен на рис. 1.7.
Рис. 1.7. Пример реализации колебательного звена
Консервативное звено (
Частотные функции этого звена имеют вид
Временные функции этого звена имеют вид
Апериодическое звено второго порядка (
где Апериодическое звено второго порядка можно представить как последовательное соединение двух апериодических звеньев первого порядка. Оно не относится к числу элементарных звеньев. Форсирующее звено второго порядка. Так называют звено, которое описывается уравнением
или, что тоже, передаточной функцией
при условии, что Получение характеристик этого звена не представляет трудности. Такое звено физически нереализуемо.
Задание
1. Изучить характеристики типовых звеньев систем автоматического управления. Ознакомиться с объектами управления, которые могут быть описаны типовыми звеньями. 2. Составление программы моделирования типовых звеньев. 3. Провести моделирование типовых звеньев и построить их временные и частотные характеристики.
|
||||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 353; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.184.236 (0.007 с.) |

 , (1.1)
, (1.1) ;
; ;
; – постоянные времени (сек);
– постоянные времени (сек); – коэффициенты передачи;
– коэффициенты передачи; – оператор дифференцирования;
– оператор дифференцирования; – порядок дифференциального уравнения.
– порядок дифференциального уравнения. (дифференциальный оператор при выходной величине) называют собственным оператором, а
(дифференциальный оператор при выходной величине) называют собственным оператором, а  (дифференциальный оператор при входной величине) – оператором воздействия.
(дифференциальный оператор при входной величине) – оператором воздействия.
 . (1.2)
. (1.2) . (1.3)
. (1.3) , где
, где  – комплексная величина
– комплексная величина ,(1.4)
,(1.4) – преобразования Лапласа.
– преобразования Лапласа. . (1.5)
. (1.5) , передаточная функция в этом случае имеет один и тот же вид. Однако необходимо помнить, что символ
, передаточная функция в этом случае имеет один и тот же вид. Однако необходимо помнить, что символ  представляет собой реакцию на выходе звена, вызванную подачей на его вход единичного, ступенчатого воздействия. Единичное, ступенчатое воздействие (единичная, ступенчатая функция)
представляет собой реакцию на выходе звена, вызванную подачей на его вход единичного, ступенчатого воздействия. Единичное, ступенчатое воздействие (единичная, ступенчатая функция)  – это воздействие, которое мгновенно возрастает от нуля до единицы и далее остается неизменным
– это воздействие, которое мгновенно возрастает от нуля до единицы и далее остается неизменным
 . (1.6)
. (1.6) представляет собой реакцию звена на единичный импульс. Единичный импульс (единичная импульсная функция или дельта-функция) – это математическая идеализация предельно короткого импульсного сигнала. Единичный импульс – это импульс, площадь которого равна единице при длительности, равной нулю, и высоте, равной бесконечности
представляет собой реакцию звена на единичный импульс. Единичный импульс (единичная импульсная функция или дельта-функция) – это математическая идеализация предельно короткого импульсного сигнала. Единичный импульс – это импульс, площадь которого равна единице при длительности, равной нулю, и высоте, равной бесконечности
 .
. . (1.7)
. (1.7) .
. .
. ;
; .
. ,
, – амплитуда, а
– амплитуда, а  – угловая частота этого воздействия.
– угловая частота этого воздействия. ,
, – амплитуда выходных установившихся колебаний;
– амплитуда выходных установившихся колебаний;  – фазовый сдвиг между входными и выходными колебаниями.
– фазовый сдвиг между входными и выходными колебаниями. ;
; .
.
 , называемой логарифмической амплитудной характеристикой (ЛАХ), а фазовая – в виде зависимости
, называемой логарифмической амплитудной характеристикой (ЛАХ), а фазовая – в виде зависимости  , используя
, используя  и
и  в качестве полярных координат.
в качестве полярных координат. и
и  называются соответственно действительной (вещественной) и мнимой частотными характеристиками.
называются соответственно действительной (вещественной) и мнимой частотными характеристиками. подставить
подставить  , то получится комплексная величина
, то получится комплексная величина  . (1.8)
. (1.8) ;
;  ;
; ;
;  .
. ;
; .
. , (1.9)
, (1.9) . (1.10)
. (1.10) ;
;  ;
;  ;
;  ;
;  ;
; ;
; ;
;  .
.
 , (1.11)
, (1.11) . (1.12)
. (1.12) .
. ;
;  ;
;  ;
;  ;
; ;
;  .
. ;
;  .
.
 , (1.13)
, (1.13) . (1.14)
. (1.14) .
. ;
;  ;
;  ;
;  ;
; .
. ;
;  .
. , (1.15)
, (1.15) . (1.16)
. (1.16) ;
;  ;
;  ;
; ;
;  ;
; .
. ;
;  .
.
 , (1.17)
, (1.17) . (1.18)
. (1.18) ;
;  ;
;  ;
; ;
;  .
. ;
;  .
. , (1.19)
, (1.19) . (1.20)
. (1.20) ;
;  ;
; ;
;  ;
; ;
;  .
. ;
;  .
.
 , (1.21)
, (1.21) . (1.22)
. (1.22) . Если
. Если  , то звено по своим свойствам приближается к интегрирующему и инерционному звеньям. Если же
, то звено по своим свойствам приближается к интегрирующему и инерционному звеньям. Если же  , то звено – ближе к дифференцирующему и инерционно-дифференцирующему звеньям.
, то звено – ближе к дифференцирующему и инерционно-дифференцирующему звеньям. ;
; ;
;  ;
; .
. ;
;  .
.

 , (1.23)
, (1.23) ,
,  ,
, , (1.24)
, (1.24) , консервативным, если
, консервативным, если  , и апериодическим звеном второго порядка, если
, и апериодическим звеном второго порядка, если  . Коэффициент
. Коэффициент  называют коэффициентом относительного демпфирования или степенью затухания.
называют коэффициентом относительного демпфирования или степенью затухания. ;
;  ;
;  ;
;  ;
; 
 .
. ;
; ,
, ;
;  ;
;  .
.
 .
. ;
;  ;
;  ;
;  ;
;
 .
. ,
, .
.

 .
.


