Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Електронні керуючі комплекси двигунівСодержание книги
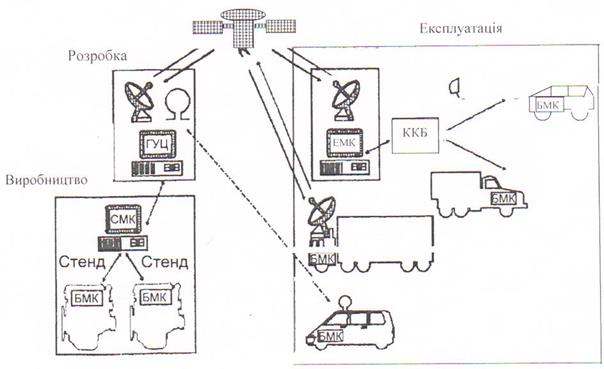
Поиск на нашем сайте Одним з найважливіших напрямів розвитку автомобільних систем керування є збільшення комплексності систем. При цьому спостерігаються дві тенденції: 1. Інтеграція МПСК двигуна в загальну мережу бортових мікроконтролерів автомобіля керуючих трансмісією, системами захисту і безпеки, навігації, круїз-контролю тощо. Завершується така мережа центральним бортовим комп'ютером. Такий комп'ютер призначений не тільки для загального контролю роботи окремих елементів мережі але, головним чином, для зовнішнього інформаційного обслуговування водія і пасажирів, включаючи використання сучасних комунікаційних систем для зв'язку з будинком, банком і офісом, можливість виходу в інтернет, використання мультимедіа тощо; 2. Створення зовнішніх комплексів для керування двигунами в процесі відладки і експлуатації. Такі комплекси, в першу чергу, створюються стосовно двигунів спеціальних автомобілів фірмами виробниками і в крупних експлуатуючих фірмах. Мікропроцесорне керування кожним окремим двигуном здійснюється декількома керуючими системами різного рівня і різного функціонального призначення, що утворюють зв'язаний комплекс. Схема такого електронного керуючого комплексу, стосовно автомобільних двигунів, представлена на рис. 4.1. Неодмінним елементом електронного керуючого комплексу є бортовий мікроконтролер (БМК), зв'язаний з двигуном, який спільно з ним експлуатується і часто встановлений безпосередньо на ньому. Можливе виконання БМК безпосередньо у складі центрального мікроконтролера автомобіля.
Рис. 4.1. Схема електронного керуючого комплексу автомобільних двигунів ГУЦ - головний стаціонарний центр керування розробника; СМК - стаціонарний стендовий налагоджувальний мікроконтролер; БМК - бортовий мікроконтролер; ККБ – контрольно-коректуючий блок; ЕМК - мікроконтролер експлуатуючого підприємства Врешті, всі системи електронного керуючого комплексу взаємодіють з двигуном саме через БМК. Апаратне забезпечення (набір модулів) БМК збирають паралельно з виготовленням і зборкою двигуна. Двигун поступає на заводський стенд разом із своїм персональним БМК. Спочатку БМК одержує початкові версії алгоритмів керування (математичного забезпечення), що забезпечують пуск і спільну відладку двигуна і БМК на стенді. Після закінчення відладки БМК одержує свою індивідуальну версію математичного забезпечення для експлуатації в комплекті з своїм двигуном. Перестановка надалі БМК з одного двигуна на іншій без корекції математичного забезпечення недопустима. БМК виконує всі алгоритми регулювання, має необхідний мінімум програмних, пошукових і аналітичних алгоритмів оптимального адаптивно-робастного керування, уточнює, за наслідками виконаного ним пошуку інформацію, параметри програм. Він звичайно виконує також і діагностування двигуна і своїх вузлів, реалізує алгоритми забезпечення надійності, попереджувальної сигналізації і аварійного захисту двигуна, накопичує діагностичну і робочу інформацію про виявлені дефекти, проведені ним операції по усуненню або зменшенню їх впливу на якість роботи двигуна. Крім того, БМК накопичує інформацію про режими роботи двигуна, витрату палива і про всі порушення в експлуатації, допущені обслуговуючим персоналом, у тому числі і водієм, інструкцій і розпоряджень виробників двигуна і автомобіля, а також експлуатуючого підприємства. На деяких автомобілях частина цієї інформації разом з інформацією про роботу інших систем автомобіля поступає і в «чорний ящик», аналогічний вживаному в авіації. СМК – стаціонарний стендовий налагоджувальний мікроконтролер володіє ширшим спектром пошукових і аналітичних адаптивних алгоритмів. СМК підключається до БМК для регулювання, відладки і здачі двигуна після виготовлення або капітального ремонту, а також введення в БМК початкового, а після відладки і робочих варіантів математичного забезпечення. СМК вводить в БМК, ще на стадії зборки двигуна, всю, одержувану від головного стаціонарного керуючого центру розробника (або виробника) – ГУЦ, початкову інформацію, необхідну для початку його роботи з даним двигуном. СМК виконує разом з БМК повний об'єм пошукової адаптації для забезпечення відладки, випробувань, здачі двигуна і уточнення початкових робочих версій алгоритмів і програм керування БМК двигуна в експлуатації. Виробник двигунів для виключення або зведення до мінімуму наслідків невмілого користування може вводити для виготівників і експлуатаційників автомобілів кодові заборони на будь-які несанкціоновані ним корективи математичного забезпечення БМК. Наприклад, обмеження подачі палива, що вводяться в робочі програми виробником двигуна і, які враховують умови експлуатації, обумовлені при замовленні двигуна. По деяких обмеженнях, як втім, і по деяких параметрах алгоритмів керування, допускається подальша корекція тільки у бік посилення обмежень. На заводському стенді вибираються конкретні для даного двигуна параметри математичного забезпечення його БМК, з яким двигун і БМК передається на завод виробник автомобіля. На цьому власне відладка мікроконтролера двигуна закінчується. У ГУЦ є узагальнені початкові варіанти математичного забезпечення БМК для кожного типорозмеру двигуна. ГУЦ розробляє, перш за все, початкову стендову версію математичного забезпечення. Він враховує призначення, умови роботи, експлуатаційні і сертифікаційні дані вибраної замовником модифікації двигуна, задані функції керування і необхідні параметри математичного забезпечення БМК. Через СМК ці дані вводяться як початкові в БМК. ГУЦ через різні системи зв'язку періодично підключається до БМК безпосередньо або через проміжні керуючі структурні ланки не тільки під час відладки і здачі двигуна, але і при його експлуатації. Друге коло функцій ГУЦ починається з накопичення в своєму запам’ятовуючому пристрої (у файлах, відмічених серійними номерами двигуна і БМК) остаточних робочих версій математичного забезпечення, відпрацьованих СМК, а також відомості про історію створення двигуна, інформацію про початкові його характеристики. Запам'ятовується інформація про математичне забезпечення кожного зразка БМК двигуна, що зійшов із заводського стенду. Згодом ГУЦ зіставляє її з інформацією, зібраною БМК безпосередньо при експлуатації і що періодично поступає в нього для визначення і внесення необхідних змін в математичне забезпечення. Крім того, результати експлуатації конкретних зразків двигунів аналізуються, узагальнюються і зіставляються з новими розробками. ГУЦ вносить корективи в робочі алгоритми і програми адаптивного керування, як кожного конкретного, так і всіх інших експлуатованих однотипних двигунів, а також і в початкові версії програмного забезпечення БМК двигунів, що знов виготовляються і проектованих. Зміни програмного забезпечення двигунів, що випускаються, так і експлуатованих, необхідні для реалізації нових функцій, характеристик і версій керування БМК. Це найраціональніше без зміни апаратної частини БМК. У електронному керуючому комплексі є і проміжні керуючі структурні ланки, не показані на рис. 4.1, які представляють в першу чергу керуючі центри виробників автомобілів. Виробник автомобіля може внести, в межах дозволеного, власні додаткові корективи в математичне забезпечення БМК, що враховують специфіку роботи двигуна на даному типі автомобіля. Найчастіше вводять обмеження частоти обертання двигуна по допустимій швидкості автомобіля, відповідно до особливостей конкретного місця експлуатації. При цьому можуть бути використані і загальні рекомендації, і математичне забезпечення виробників двигунів. Така індивідуальна корекція обмеження частоти обертання двигуна в БМК забезпечує виробникам автомобілів і експлуатуючим організаціям без додаткових витрат здійснення оптимального обмеження швидкості руху по дорогах для підвищення безпеки і надійності. Численнішу групу проміжних ланок електронного керуючого комплексу складають мікроконтролери периферійних регіональних сервісних або експлуатуючих підприємств і транспортних компаній – ЕМК. Останні накопичують в своєму запам'ятовуючому пристрої (у файлах, відмічених серійними номерами двигуна і БМК) інформацію, одержану безпосередньо від БМК через різні системи зв'язку або через переносний контрольно-коректуючий блок ККБ, що періодично підключається. ЕМК узагальнює і передає в ГУЦ інформацію про результати експлуатації двигунів, проводить, при необхідності, власний їх аналіз, визначає доцільність додаткової корекції, що враховує особливості експлуатації, наприклад, обмеження частоти обертання і подачі палива, які забезпечують збільшення терміну служби, продуктивності, зниження шкідливих викидів або витрати палива. Ця корекція здійснюється звичайно через ККБ. ККБ використовує для періодичної перевірки і коректування математичного забезпечення, накопичену в БМК в процесі експлуатації двигуна наступну діагностичну інформацію: дійсні характеристики і параметри двигуна, режими роботи, порушення допущені персоналом, відмови, що мали місце і процедури, проведені БМК, тобто інформацію по змінах математичного забезпечення, які були виконані БМК автоматично. ККБ виконує при необхідності повнішу діагностику БМК і двигуна, додаткові до набору БМК алгоритми пошукової адаптації для корекції математичного забезпечення локальних систем і програмної адаптації. ККБ звичайно застосовується для обслуговування групи спільно експлуатованих двигунів. ККБ найчастіше виконують у вигляді комп'ютера-ноутбука. Але останнім часом з'явилися безконтактні зчитуючі пристрої, що забезпечують автоматичне підключення БМК до ЕМК або ГУЦ при проїзді автомобіля поблизу такого зчитуючого пристрою. Ці пристрої можуть бути встановлені в будь-яких точках дорожньої мережі, наприклад, на території транспортного підприємства, або на магістралях, по яких можливий проїзд контрольованих автомобілів. Такі безконтактні зчитуючі пристрої знімають інформацію, накопичену БМК, і передають в нього інформацію, підготовлену ГУЦ саме для цього автомобіля. Очевидно, що інформація про необхідні дії по обслуговуванню передається не тільки водію на відеоконтрольний пристрій автомобіля, але і на ЕМК або власнику автомобіля. Для обміну інформацією між БМК, ЕМК і ГУЦ звичайно використовують телекомунікаційні системи, наприклад, супутникового космічного зв'язку. По них передається в ГУЦ інформація про стан кожного з обслуговуваних двигунів, а з нього – необхідні індивідуальні корективи математичного забезпечення БМК конкретних двигунів. Як правило, керуючі комплекси двигунів входять в керуючі комплекси автомобілів. При цьому як ГУЦ може виступати і сервіс-центр виробника автомобілів. На важких вантажівках і міжміських автобусах, що випускаються багатьма фірмами, застосовують саме такі об'єднані системи комунікації і контролю, звані Fleet Board, Fleet management або Dynafleet. Зв'язок автомобіля безпосередньо з сервіс центром здійснюється через Інтернет. Система Fleet Board фірми Mersedes-Benz містить як елементи стільниковий зв'язок стандарту GSM з передачею текстових повідомлень SMS, навігаційну систему GPS і «чорний ящик». Поява навіть на легкових автомобілях супутникових навігаційних і охоронних систем, стільникових телефонів і інших видів зв'язку дозволяє організувати безпосереднє підключення БМК до ЕМК або навіть ГУЦ. При цьому вся інтелектуальна частина обслуговування: аналіз накопиченої інформації, необхідне або бажане перепрограмування БМК і вироблення рекомендацій користувачу двигуна, про доцільний перелік технічного обслуговування виробляється ЕМК або ГУЦ і реалізується через БМК з висновком інформації водію на загальний дисплей автомобіля. В результаті застосування електронних керуючих комплексів експлуатація двигунів з одного боку стала простішою, а з іншого – вся система експлуатації стала вищої якості і досконалішою, що досягається інтелектом цифрового керування ГУЦ. Це, безумовно, спрощує, розширює і прискорює повсюдне використовування електронних керуючих комплексів двигунів в якнайповнішому і ефективнішому вигляді. Дещо спрощений варіант подібного електронного керуючого комплексу двигунів кар'єрних автосамоскидів великої і особливо великої вантажопідйомності більше 10 років діє в компанії Detroit Diesel. За оцінкою компанії його використовування виявилося ефективним при роботі з достатньо крупними експлуатуючими підприємствами, що мають спеціально підготовлений кваліфікований персонал, комунікаційні системи, а в кращому разі і засоби попередньої обробки ЕМК інформації з ККБ. Керуючі комплекси створили і успішно застосовують фірми Volvo, Cammins, Scania тощо. Для дрібних і тим більше індивідуальних користувачів автомобілів включення в електронний керуючий комплекс створює серйозні кваліфікаційні і психологічні труднощі. Головною перешкодою радикального рішення цієї проблеми є непідготовленість експлуатаційників і власників автомобілів. Їх перенавчання і перевиховання стало одним з найважливіших напрямів діяльності двигуновиробних фірм. В той же час у складі керуючих комплексів ступінь автоматизації адаптивних БМК двигунів стає таким високим, що дозволить водію, у тому числі і непрофесійному, експлуатувати будь-який автомобіль без спеціальної підготовки. Можна чекати, що провідні автомобілевиробні фірми з метою підвищення якості і надійності автомобілів створять в найближчому майбутньому електронні керуючі комплекси і для легкових автомобілів. СХЕМА АДАПТИВНОЇ МПСК Можна виділити дві основні задачі керування будь-якого варіанту МПСК двигуном автомобіля: Забезпечення у будь-який момент часу потужності двигуна, необхідної для руху автомобіля із заданою швидкістю і прискоренням або готовності двигуна до такого руху автомобіля, тобто керування вантажно-швидкісним режимом роботи двигуна. Забезпечення на всіх режимах роботи двигуна бажаних значень показників, що визначають якість роботи двигуна, таких, як паливна економічність, рівень викидів шкідливих речовин, рівень шуму тощо. Перша задача – керування вантажно-швидкісним режимом роботи двигуна в тій чи іншій мірі визначається водієм, хоча і її рішення може бути автоматизоване в МПСК. Друга задача – адаптивне керування параметрами цілком розв'язується МПСК. Крім того, необхідно, щоб МПСК здійснювала б узгоджене адаптивне керування всіма параметрами з оптимізацією їх якості і з урахуванням необхідності взаємодії зі всіма системами керування інших агрегатів силової установки і автомобіля. Для забезпечення всього цього комплексу задач доцільно використати ієрархічну структуру МПСК, нижній рівень якої складають локальні системи керування (регулювання) окремими параметрами двигуна. Локальна система включає в себе один із програмних блоків мікроконтролера і в якості об’єкта керування один із каналів двигуна. На рис.4.2 представлено спрощену, за рахунок скорочення набору регульованих параметрів, схему ієрархічної адаптивної МПСК двигуном з автоматичним регулюванням частоти обертання, яка характерніша для дизелів. В схемі система автоматичного регулювання частоти обертання представлена регулятором частоти обертання РЧ з вихідним сигналом u ч і каналом формування частоти обертання двигуна КЧ, вихід якого – частота обертання двигуна n. Всі інші системи автоматичного регулювання, представлені на цьому рисунку, по відношення до системи регулювання частоти обертання можна вважати додатковими і вторинними.
Рис. Спрощена схема ієрархічної адаптивної МПСК двигуном з автоматичним регулюванням частоти: програматори: ПРН – навантаження; ПРЧ – частоти обертання; ПРВ –випередження; ПРТ – тиску; пошукові системи: ПСЧ – частоти обертання; ПСВ – випередження; ПСТ – тиску; регулятори: РН – навантаження; РЧ – частоти обертання; РТ – тиску; РВ – випередження вприскування; П – електрична передача на колеса; канали двигуна: КЧ – частоти обертання; КТ – тиску; КВ – випередження; вхідний сигнал МПСК (від водія): u 3 – положення педалі керування; керуючі впливи мікроконтролера: u н – навантаженням; u ч – частотою обертання; u т – тиском; u в – випередженням; керовані параметри двигуна: P н – навантаження двигуна (через електричну передачу); n – частота обертання; p – тиск повітря (або палива); q в – кут випередження впорскуванням; G –витрати палива На схемі представлені як приклади тільки дві характерні додаткові системи – замкнута і розімкнена. Замкнута – система регулювання тиску наддуву або аналогічна їй по структурі система регулювання тиску палива. Ця система утворена регулятором тиску РТ і каналом двигуна KТ, перетворюючим електричний вихідний сигнал u т регулятора тиску в тиск повітря (або палива) р. Як приклад розімкненої системи на схемі показана система регулювання випередження уприскування палива q в, утворена регулятором випередження РВ, вихідний сигнал якого u в і каналом двигуна КВ. Ця система розімкнена, оскільки в ній немає неконтрольованих збурень. Розглянута частина системи керування (сукупність локальних систем керування параметрами), забезпечує роботу двигуна із заданою точністю підтримки його параметрів в усталених режимах і необхідну або навіть оптимальну по тривалості і максимальному відхиленню якість перехідних процесів регулювання параметрів двигуна і, перш за все, по частоті обертання. Система автоматичного регулювання частоти обертання не тільки найважливіша, але і найдосконаліша по точності і швидкодії локальна система МПСК двигуна. Вона виконує виняткову роль в адаптивному керуванні, оскільки керуючі дії (вихідний сигнал регулятора і його похідні), що виробляються нею, використовуються на всіх рівнях у всіх видах адаптації. Канал формування частоти обертання КЧ, представлений на рис. 4.2, починається в двигуні з паливної системи, яка перетворює вихідний керуючий сигнал частоти u ч в циклову подачу палива. У КЧ послідовно входять також теплова ланка двигуна, яка перетворює подачу палива в крутний момент, і механічна ланка двигуна, яка перетворює різницю крутного моменту і моменту опору в зміну частоти збертання. Система автоматичного регулювання частоти обертання замкнута, за відхиленням, тобто по різниці заданої і дійсної частот обертання, що подаються на РЧ. По відхиленню частоти відповідно алгоритму керування РЧ формує вихідний сигнал u ч. РЧ доти змінює цей сигнал, поки встановлена ним подача палива в двигун не наблизить із заданою точністю необхідну і дійсну частоти обертання двигуна. Таке регулювання забезпечує високу точність встановлення і підтримки частоти обертання, оскільки знижує до допустимого рівня відхилення, викликане будь-яким збуренням. Очевидно, що в замкнутій системі зміни вихідного сигналу u ч – це реакція РЧ на будь-які збурення, що поступили в систему. Цей сигнал найбільш інформативний і виражає найточніше і швидко процеси, що відбуваються в МПСК. Оскільки подача палива в циліндри пропорційна u ч, то йому ж пропорційний і крутний момент двигуна. Звичайно, чисельне значення коефіцієнта пропорційності залежить від параметрів палива, повітряного заряду, ефективності згорання, частоти обертання тощо, отже, він не постійний. Але в першому наближенні, особливо при достатній стабільності вказаних чинників, u ч відображає миттєві значення крутного моменту і потужності двигуна. З іншого боку, будучи еквівалентний витраті палива (найзагальнішому критерію оптимальності), він може оперативно використовуватися як критерій для реалізації оптимального керування, адаптації, як втім, і для інших задач. Використовування u ч як носія інформації про крутний момент, потужність і витрату палива виключає необхідність установки на двигун давачів цих параметрів, які, до речі, відносяться до числа найскладніших і дорожчих. У цифрових регуляторах частоти обертання вихідний сигнал, дійсна частота і її відхилення діють безпосередньо в них і представляються чисельно в коді, прийнятому в мікроконтролері. Це спрощує використовування цих сигналів у всіх каналах керування, контролю і діагностики двигуна. Адаптивна оптимізація по витраті палива в режимах, що визначаються досягнутою частотою обертання і прикладеним навантаженням, виробляється в схемі, показаній на рис. 4.2, адаптивним керуючим пристроєм, для якого об'єкт керування – сукупність локальних систем керування параметрами. Адаптивний пристрій є другим рівнем в структyрі керуючої системи. Він виконує узгоджене адаптивне керування всіма керованими параметрами двигуна. Реалізується він так само, як і регулятори локальних систем в мікроконтролері. Адаптивний пристрій складається з програматорів і пошукових систем. У програматорах виконується необхідний об'єм аналітичної адаптації. Програматори виробляють завдання регуляторам параметрів двигуна і здійснюють програмну адаптацію. Завдання кожному з регуляторів формуються за індивідуальними програмами у функції дійсної частоти обертання, прикладеного до двигуна навантаження, інших контрольованих параметрів двигуна і середовища, а також вихідних сигналів регуляторів інших локальних систем. На схемі рис. 4.2 програматори включені в канали керування тиском (ПРТ) і випередженням (ПРВ). Пошукові системи представлені в каналах керування тиском (ПСТ) і випередженням (ПСВ). Ці системи діють переважно в усталених режимах. Принципово пошукові процедури можливі і в перехідних процесах, проте це пов'язано з необхідністю підвищення точності і швидкодії апаратних і програмних засобів. Тому доцільність їх реалізації вимагає у кожному випадку спеціального аналізу. Пошукові системи визначають зміни завдань регуляторам параметрів двигуна, необхідні для точнішої, ніж при програмній адаптації, оптимізації режиму. Пошук здійснюється шляхом пробних змін завдань відповідним регуляторам і оцінкою, викликаних цими, змінами витрат палива. Для оцінки впливу параметрів, що не змінюють циклову подачу, досить змін вихідного сигналу регулятора частоти, вироблених ним при усуненні відхилень частоти обертання, викликаних пробним сигналом. Прикладом такого регульованого параметра служить випередження уприскування палива. Для вибору параметрів, що змінюють циклову подачу палива, пошуковій системі в загальному випадку потрібно контролювати безпосередньо витрату палива. До числа таких параметрів відноситься форма характеристики уприскування. Приклад такого параметра – тиск палива (тиск повітря явно не відноситься до таких параметрів). Як критерій оптимальності по тиску палива на схемі використана загальна (часова) витрата палива двигуном. У ряді випадків в пошуковому пристрої можна використати однозначність залежності циклової подачі від тиску палива в акумуляторі і обмежитися оцінкою якості по вихідному сигналу регулятора частоти з урахуванням впливу тиску палива. При жорсткому програмному керуванні основними параметрами двигуна, вихідний сигнал регулятора частоти достатньо чітко пов'язаний зі всіма цими параметрами. Тому, в першому наближенні, він також може бути використаний для пошукової адаптації по будь-яких параметрах. Після закінчення пошуку і виводу двигуна в точку мінімуму витрати адаптивна система за одержаними нею даними уточнює алгоритми програмної і аналітичної адаптації (зміст таблиць або коефіцієнтів аналітичних залежностей). Це дозволяє підвищувати точність оптимізації при програмній адаптації залежно від реальних характеристик конкретного зразка двигуна і умов його роботи. Сукупність програматорів і пошукових систем керування параметрами двигуна утворює основний (перший) рівень адаптивного керування. Разом з оптимізацією сукупності параметрів двигуна в кожному режимі існує задача вибору оптимального режиму роботи двигуна. Така задача розв'язується на другому рівні адаптивного керування. Для адаптивного керуючого пристрою, що оптимізує режим роботи двигуна, об'єктом керування є адаптивна система керування параметрами двигуна. Простим прикладом адаптивного керуючого пристрою першого рівня може служити програматор в системі керування частотою обертання двигуна (ПРЧ), який встановлює оптимальну тимчасову програму зміни завдання частоти обертання, яка враховує при пуску двигуна його початковий стан і запас енергії в пусковому джерелі. На рис. 4.2 також показана система регулювання електричної передачі (П) автомобіля, яка встановлює навантаження двигуна Р н. Вона містить регулятор навантаження (PH) з вихідним сигналом u н. Адаптивний пристрій першого рівня включає окрім програматора частоти ПРЧ програматор навантаження (ПРН) і пошукову систему керування частотою обертання (ПСЧ). Задача цього рівня адаптації - вибір поєднання швидкісного і потужністного режимів, при якому досягається мінімальна питома витрата палива двигуном. Для визначення питомої витрати адаптивному пошуковому пристрою окрім інформації про витрату палива потрібна інформація і про навантаження двигуна. У такій системі керування інформація від педалі водія у вигляді сигналу u 3 поступає паралельно на входи програматорів навантаження і частоти. Внаслідок чого, за оптимальними тимчасовими програмами двигун виводиться в околиці режиму, оптимального по питомій витраті палива. Потім пошуковий адаптивний пристрій керування частотою обертання незмінної потужності, що передається для руху автомобіля, встановлює частоту обертання двигуна, при якій забезпечується мінімальна питома витрата палива. Одержані дані також можуть бути використані для уточнення програми програматора частоти. Для досягнення високої якості перехідних процесів в комплексній МПСК доцільне застосування дії по швидкостях і прискореннях (першим і другим похідним) сигналів, в першу чергу тих, які поступають від регулятора частоти. Наприклад, алгоритми програмної адаптації усталених і перехідних процесів істотно відрізняються. Для оптимізації перехідних процесів ефективні коректуючі дії по похідних. Обчислення похідних сигналів, органічно присутніх в мікроконтролері найрацінальніше. Виділення як ведучої оптимізованої по швидкодії і точності системи регулювання частоти обертання двигуна і максимальне використовування вихідного сигналу регулятора частоти обертання і його складових на всіх рівнях і у всіх видах адаптації забезпечують найбільшу ефективність адаптивного керування. Алгоритми робастно-адаптивного регулювання частоти обертання двигуна, кількості працюючих циліндрів двигуна, програмно-пошукового регулювання випередження вприскування палива, адаптивного сумісного регулювання частоти обертання і потужності двигуна адаптивного регулювання розподілу навантаження між працюючими циліндрами, обмеження подачі палива оптимізовані по числу необхідних для їх реалізації давачів. Вони забезпечують також активну діагностику і підвищення надійності двигуна.
|
||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 357; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.011 с.) |