
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система стабилизации температуры рабочей жидкости привода манипулятора транспортной машиныНижний Новгород 2013г. Оглавление 1) Задание к работе. 3 2) Принципиальная схема. 4 3) Передаточные функции звеньев системы. 5 4) Преобразование схемы в одноконтурную. 6 5) Передаточные функции разомкнутой и замкнутой систем. 6 6) Построение АФЧХ, АЧХ, ФЧХ. 7 7) Определение устойчивости разомкнутой САУ. 11 8) Построение ЛАЧХ, ЛФЧХ. 11 9) Определение устойчивости системы используя критерий Найквиста. 12 10) Определение передаточной функции корректирующего звена. 12 11) Передаточные функции данной и скорректированной САУ. 13
Задание к работе Система стабилизации температуры рабочей жидкости привода манипулятора транспортной машины
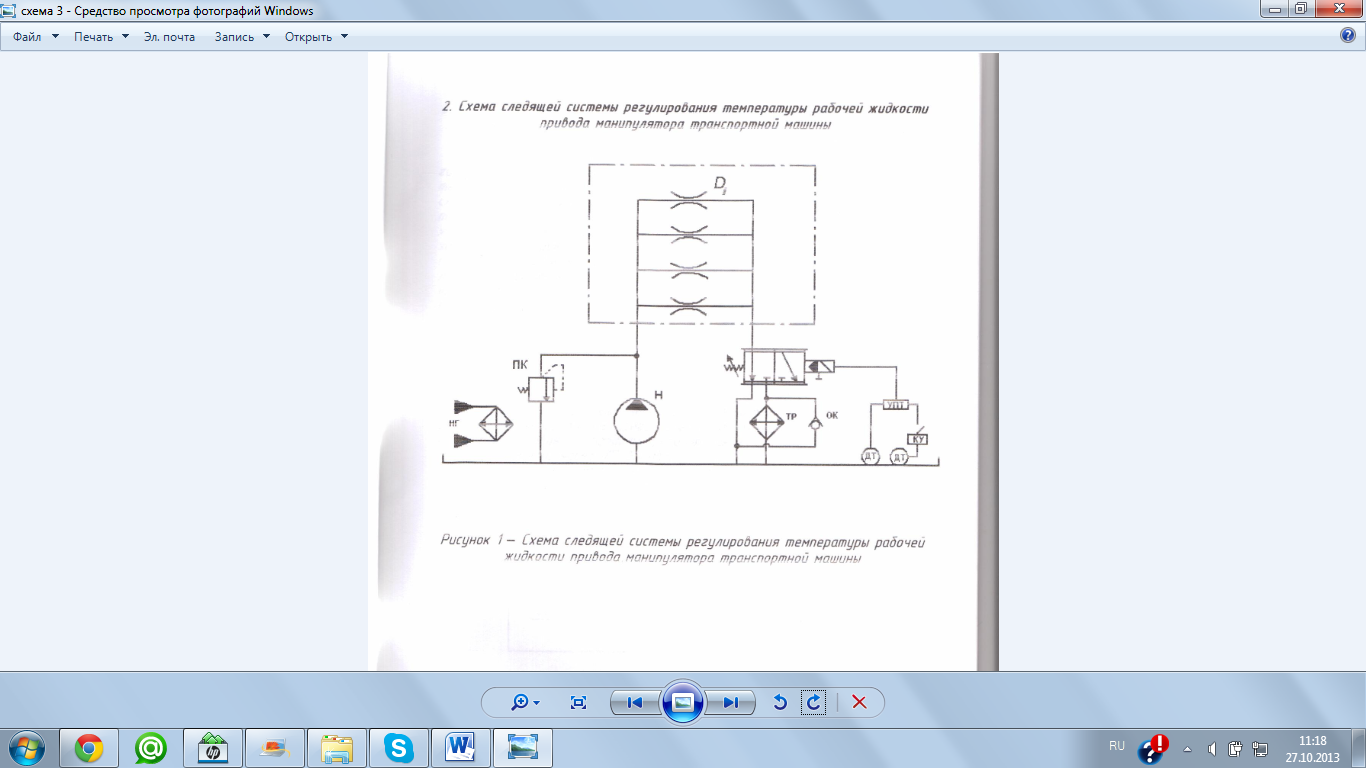
Объектом ре гулирования является система в виде параллельных гидролиний Di (системы смазки, охлаждения). Регулируемый параметр – температура жидкости Ω. Принцип работы системы: перед включением привода в условиях низких температур с помощью нагревателя НГ (в данном случае – жидкостного) происходит подогрев рабочей жидкости в емкости (баке) до заданной температуры. При запуске привода рабочая жидкости от насоса поступает в систему и далее через электрогидравлический усилитель (ГУ) на слив в бак. В процессе работы манипулятора увеличивается возмущение (например нагрузка на рабочий орган) и, соответственно, повышается температура рабочей жидкости в гидросистеме, которая может превысить допустимое значение. Дистанционный электрический датчик температуры (ДТ) измеряет величину регулируемого параметра Ω и в виде изменения напряжения U передает сигнал на вход усилителя постоянного тока УПТ. Из усилителя ток J поступает на электромагнит гидравлического усилителя, который осуществляет пропорциональное перемещение золотника. Последний направляет поток жидкости через терморегулятор (охладитель ТР) в бак. Задающее устройство ГУ – регулируемая пружина – позволяет установить начальные условия и пределы регулирования температуры. Прохождение рабочей жидкости через ТР вызывает снижение ее температуры. Выходной сигнал датчика ДТ уменьшается и, соответственно, уменьшается сигнал управления ГУ. Регулируемая пружина перемещает золотник в обратном направлении, и рабочая жидкость поступает в бак, минуя ТР. Цикл повторяется.
Математическое описание системы 1. Дистанционный электрический датчик температуры (ДТ) – измеряет регулируемый параметр – температуру Ω и преобразует в более удобный сигнал – падение напряжения U
2. Усилитель постоянного тока УПТ Сигнал U от датчика ДТ поступает на УПТ, который преобразует входной сигнал в пропорциональный выходной сигнал по току J
3. Электромеханический преобразователь (ЭМП) – предназначен для преобразования электрического сигнала поступающего от усилителя в механическое перемещение регулирующего органа – золотника ГУ
h – перемещение золотника
С – жесткость возвратной пружины 4. Объект регулирования
Данные для анализа и синтеза системы
2) Принципиальная схема.
Передаточные функции звеньев системы.
4) Преобразование схемы в одноконтурную с подстановкой данных.
Передаточные функции разомкнутой и замкнутой систем.
Построение АФЧХ, АЧХ, ФЧХ
Построение ЛАЧХ, ЛФЧХ.
Вывод: Система не устойчива и, как следствие, нуждается в коррекции.
ЛАЧХ и ЛФЧХ скорректированной системы построим по алгоритму построения ЖЛАЧХ. Выбираем тип характеристики – 3. Тогда:
Нижний Новгород 2013г. Оглавление 1) Задание к работе. 3 2) Принципиальная схема. 4 3) Передаточные функции звеньев системы. 5 4) Преобразование схемы в одноконтурную. 6 5) Передаточные функции разомкнутой и замкнутой систем. 6 6) Построение АФЧХ, АЧХ, ФЧХ. 7 7) Определение устойчивости разомкнутой САУ. 11 8) Построение ЛАЧХ, ЛФЧХ. 11 9) Определение устойчивости системы используя критерий Найквиста. 12 10) Определение передаточной функции корректирующего звена. 12 11) Передаточные функции данной и скорректированной САУ. 13
Задание к работе Система стабилизации температуры рабочей жидкости привода манипулятора транспортной машины
Объектом ре гулирования является система в виде параллельных гидролиний Di (системы смазки, охлаждения). Регулируемый параметр – температура жидкости Ω. Принцип работы системы: перед включением привода в условиях низких температур с помощью нагревателя НГ (в данном случае – жидкостного) происходит подогрев рабочей жидкости в емкости (баке) до заданной температуры. При запуске привода рабочая жидкости от насоса поступает в систему и далее через электрогидравлический усилитель (ГУ) на слив в бак. В процессе работы манипулятора увеличивается возмущение (например нагрузка на рабочий орган) и, соответственно, повышается температура рабочей жидкости в гидросистеме, которая может превысить допустимое значение. Дистанционный электрический датчик температуры (ДТ) измеряет величину регулируемого параметра Ω и в виде изменения напряжения U передает сигнал на вход усилителя постоянного тока УПТ. Из усилителя ток J поступает на электромагнит гидравлического усилителя, который осуществляет пропорциональное перемещение золотника. Последний направляет поток жидкости через терморегулятор (охладитель ТР) в бак. Задающее устройство ГУ – регулируемая пружина – позволяет установить начальные условия и пределы регулирования температуры. Прохождение рабочей жидкости через ТР вызывает снижение ее температуры. Выходной сигнал датчика ДТ уменьшается и, соответственно, уменьшается сигнал управления ГУ. Регулируемая пружина перемещает золотник в обратном направлении, и рабочая жидкость поступает в бак, минуя ТР. Цикл повторяется.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 233; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.102 (0.009 с.) |

 – коэффициент передачи
– коэффициент передачи – постоянная времени интегрирования
– постоянная времени интегрирования
 – коэффициент усиления УПТ
– коэффициент усиления УПТ
 - коэффициент передачи ЭМП
- коэффициент передачи ЭМП и
и  – индуктивность и сопротивление обмотки электромагнитной катушки ЭМП
– индуктивность и сопротивление обмотки электромагнитной катушки ЭМП
 – постоянная времени, характеризует тепловую инерционность системы. Зависит от температуры рабочей жидкости и теплопередачи
– постоянная времени, характеризует тепловую инерционность системы. Зависит от температуры рабочей жидкости и теплопередачи – температура рабочей жидкости
– температура рабочей жидкости – коэффициент передачи объекта регулирования по перемещению золотника
– коэффициент передачи объекта регулирования по перемещению золотника – функция возмущения объекта регулирования (изменение нагрузки системы привода, температуры окружающей среды и т.д. Эта функция может быть детерминированной или иметь случайный характер
– функция возмущения объекта регулирования (изменение нагрузки системы привода, температуры окружающей среды и т.д. Эта функция может быть детерминированной или иметь случайный характер
























