Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
CCA4 (2mHz 41in) CCP4 (2mHz 19in)Содержание книги Поиск на нашем сайте
Перед тем как программировать данные надо уточнить у геолога, какие данные в реальном времени он хотел бы видеть, если геолога нет, то согласовать с офисом.
Т.к. у нас модуль ориентирования 3-Bay, то он определяет, есть ли вращение колонной или нет. В связи с этим нам нужно составить две конфигурации данных (первая – во время вращения колонны, вторая – во время слайда, когда нет вращения колонны).
И еще, в самом начале фрейма надо поставить команду RotW:P с /21/ узла. Это команда опроса прибора есть ли вращение или нет.
Должно получиться примерно вот так
Используем 3 конфигурацию для роторного бурения, а 4 конфигурация для слайда.
В 4 конфигурации “3” перед скобками означает, что данные будут передаваться “3” раза, без опроса RotW. Затем будет следовать опрос RotW и опять три раза без опроса.
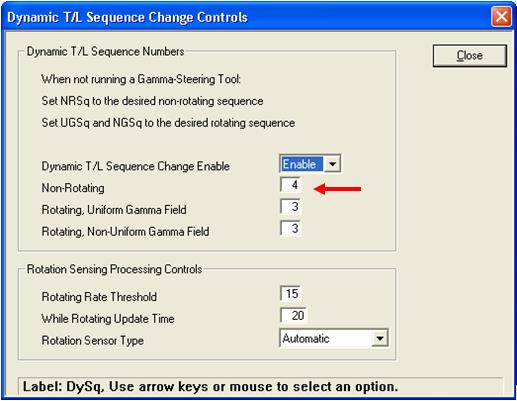
Открываем вкладку DYNAMIC T/L SEQUENCE CHANGE CONTROLS.
В строке Dynamic T/L Sequence Change Enable ставим ENABLE,
В строку Non-Rotating ставим номер конфигурации слайда (без вращения колоны) с вкладки TOOLFACE/LOGGIN SEQUENCE DENIFITION
В строку Rotating, Uniform Gamma Field и Rotating, Non-Uniform Gamma Field ставим номер конфигурации с вращением колоны, с вкладки TOOLFACE/LOGGIN SEQUENCE DENIFITION
Строка Rotating Rate Threshold означает, какое необходимо количество оборотов ротора, чтоб перейти со слайда на вращение. Строка While Rotating Update Time – задает число секунд между моментом обнаружения вращения и моментом, когда прибор запрашивается вновь, чтобы определить, вращается ли инструмент. Rotation Sensor Type всегда ставим Automatic.
Далее открываем окно PWR Processing Controls
Строка Recorder Delay означает, на какое время мы можем усыпить прибор во время спуска, чтобы батарей хватило на больше часов работы. Значение ставится в минутах.
Строка Dead Time For MWD Mode – интервал, через который будет писаться информация в память прибора. В данном случае, информация будет записаться каждые 20 сек.
Теперь можно программировать прибор, и незабываем, сделать процедуру TFO.
Также надо выставить прибор на ноль и маркером по всему прибору провести линию.
Теперь берем тестер и будем проверять мокрое соединение. На нем имеется шесть пружин. Самая нижняя от наконечника пульсатора, не используется (первая пружина). Вторую пружину соединяем с минусом на тестере, плюсом проверяем оставшиеся 4 пружины. У 3 пружины должно быть не меньше 24V У 4 пружины 1.8-2.2 V У 5 и 6 пружин 0V.
GND - Qbus ~ 1.9-2.0V; GND - Sense ~ 25V; GND - Float 0V - открытое соединение, эту пару надо прозвонить, сопротивление бесконечность; GND - Battery ~0V;
Больше ничего не меняем.
DD предупреждаем, что переходник Н З-102/З-102 (pin-pin) должен стоять под пони, после пони должен идти Centerfire.
Поднимаем аккуратно наш Centerfire на роторный стол, поднимаем гамма модуль (если он используется) и вкручиваем его (не затягивая) в Centerfire. Затем аккуратно опускаем Centerfire с гамма модулем в NMDC (пони). Оставляем небольшое расстояние, чтобы можно было теперь затянуть гамма модуль ключом. При этом надо взять второй ключ, и чтоб DD этим ключом держал Centerfire, а вы затянули гамму.
Теперь DD протягивает пони с Centerfire, и сносит метку угла перекоса двигателя на Centerfire. У Centerfire на верхнем конце есть несколько стоящих в ряд углублений, это и есть наш ноль (как показано на рисунке)
1. Глядя в направлении вниз в скважину, измерить расстояние по окружности между меткой ВЗД в направлении по часовой стрелке к ориентирующему болту на башмаке MWD. 2. Измерить длину окружности башмака при помощи рулетки. 3. Разделить число, полученное в пункте 1 (расстояние по окружности между меткой и болтом) на результат измерения длины окружности (пункт 2). 4. Умножить результат на 360° — произведение будет является значением сдвига, выраженным в градусах. 5. Это значение должно быть занесено в качестве значения DAO в процедуре TFO. Значение DAO появится в окне программы qMWDPC.
Теперь накручиваем NMDC на Centerfire. Надо также снести ноль на конец NMDC, куда мы будем сажать наш прибор.
После того как подняли телесистему на ротор, сносим метку NMDC к прибору и опускаем медленно его. После того, как его опустили, снимаем подъемный трос, берем кувалду и аккуратно забиваем телесистему, пока она полностью не сядет. Затем накручиваем вторую NMDC, подъемный патрубок и поднимаем все до порта программирования Centerfire.
Программирование зонда
Протягиваем кабель для программирования Centerfire и вставляем в порт. Подключаем кабель для программирования к SAI. Запускаем компьютер. Вставляем ключ HASP 1000, отрываем папку qMWD, затем Diagnostics и запускаем qW32 Server. Должны увидеть такие узлы:
Если видим все – то ОК. Если есть какие-то ошибки или нет одного из узлов, то может быть ошибка при подключении или плохой контакт мокрого соединения. Открываем qTalk и выставляем время во всех узлах.
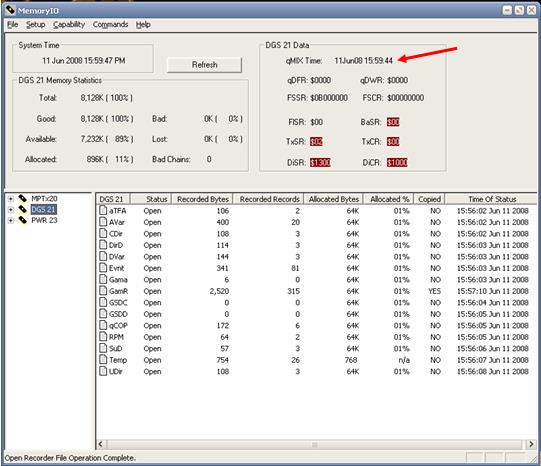
Следующем движением руки открываем программу Memory IO, должны определиться три узла:
Переходим на узел MPTx20, наводим курсор на любой файл, вызываем меню и выбираем EraseAll. И так делаем с каждым узлом. После очистки памяти в узле PWR 23 под вкладкой Status файл переходит на Close, его нужно перевести на Open. Для этого нажимаем на файл, затем в меню нажимаем на Open. Также надо проверить, чтобы во всех узлах файлы были открыты, и заодно проверяем время.
Закрываем окно.
Открываем qMWD Configuration Utility, и наш файл конфигурации, которым программировали телесистему. Этот файл надо залить только в PWR.
Открываем qTalk, забиваем в командную строку RCCD? Это команда опроса PWR & Gamma, должны прийти значения.
Если все у вас значения меняются, значит все гуд. Выключаем SAI, отключаем кабель от PWR и идем делать SHT.
Запускаем насосы, ждем сигнал, ждем замер и ждем данные по PWR. Если все имеется и работает, то можно спокойно вздохнуть и приступить к спуску инструмента.
Не доходя пару свечей до забоя нужно откалибровать датчик глубины и датчик веса на крюке.
|
||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 372; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.2.239 (0.008 с.) |