Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Особенности счетчика временной базыСодержание книги
Поиск на нашем сайте
Модуль таймера Цель работы: Изучение работы счётчика временных интервалов(таймер).
Приборы и принадлежности: 1. Плата CSMB12С128; 2. Платформа PBMCUSLK; 3. Персональный компьютер; 4. Проводы;
Прерывание Программно логическая модель центрального процессора содержит регистр признаков CCR, формат которого представлен на рис. 1.1 Особенностью всех семейств МК от компании FreescaleSemiconductor является наличие в регистре признаков не только флагов результатов операции, но и дополнительных битов управления подсистемой прерывания. В составе регистра признаков МК 68HC12/HCS12 — два таких бита. Бит I — глобальная маска прерываний — используется для управления маскируемыми прерываниями. Бит X — бит запрета немаскируемых прерываний — управляет немаскируемыми прерываниями. Оба этих бита устанавливаются в 1 в состоянии сброса МК. Обратите внимание, в МК 68HC12/HCS12 установка битов I и X запрещает соответствующие прерывания.
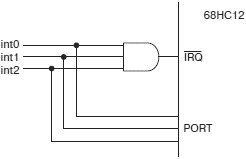
Рис. 1.1 Формат регистра состояния CCR Немаскируемые прерывания В соответствие со своим названием немаскируемые прерывания не могут быть отключены пользователем. Однако в предыдущем абзаце было упомянуто, что установка бита X в 1 запрещает немаскируемые прерывания. Значение бита X действительно равно 1 в состоянии сброса МК. Однако далее он может быть установлен в 0 под управлением программы инициализации, разрешая тем самым немаскируемые прерывания. Далее этот бит не может быть изменен под управлением программы, и в этом его отличие от бита глобальной маски прерываний I. Три типа немаскируемых прерываний реализуются в МК 68HC12/HCS12: • Прерывание по внешнему запросу • Прерывание по несуществующему коду команды. Каждая инструкция языка ассемблер МК имеет собственный код. В МК 68HC12/HCS12 коды операций могут быть однобайтовыми и двухбайтовыми. Но не все теоретически возможные коды использованы для кодирования реальных команд процессорного ядра CPU12. Если на этапе выборки кода команды из памяти произошло считывание несуществующего кода команды, то генерируется запрос на немаскируемое прерывание. • Программное прерывание — инструкция SWI. Система команд МК 68HC12/HCS12 имеет инструкцию программного прерывания, которая позволяет перейти к исполнению подпрограммы прерывания из прикладной программы. Маскируемые прерывания • Прерывание по внешнему запросу
Рис. 1.2 Внешняя цепь для подключения сигналов нескольких внешних запросов на прерывание
• Прерывание по таймеру меток реального времени RTI. Таймер меток реального времени генерирует последовательность равноотстоящих во времени запросов на прерывание. Период повторения запросов настраивается программистом. Эти прерывания могут быть использованы для регулярного выполнения микроконтроллером некоторой задачи. Например, для измерения напряжения аккумуляторной батареи каждые три мин, чтобы сигнализировать о необходимости ее замены. Мы рассмотрим особенности прерываний RTI в главе 7 на примере управления скоростью вращения электрическим двигателем. • Прерывание по событию канала захвата/сравнения (IC/OC) таймера. Восемь одинаковых блоков в составе модуля таймера, которые именуют «каналами», предназначены для контроля за уровнем сигнала на входе канала или для изменения в строго определенный момент времени логического уровня на выходе канала. Заданное программистом изменение входного или выходного сигнала канала рассматривается как событие, которое генерирует запрос на прерывание. Например, если канал настроен на слежение за перепадом входного сигнала из 1 в 0, то когда такое изменение произойдет, будет выставлен запрос на прерывание. • Прерывание по переполнению таймера. Основным блоком модуля таймера является 16 разрядный счетчик временной базы. Этот счетчик невозможно остановить. Также невозможно изменить его коэффициент счета, который составляет 216 = 65536. Поэтому регулярно счетчик временной базы изменяет свой код с $FFFF на $0000. Такое изменение кода называют переполнением счетчика. В момент переполнения по желанию программиста может генерироваться запрос на прерывание, в то время как счетчик продолжает считать дальше. Такие прерывания особенно удобны при необходимости измерения очень больших временных интервалов. Для этого в микроконтроллере производят подсчет, сколько переполнений счетчика произошло за этот временной интервал, и, зная период счета счетчика, определяют длительность исследуемого временного интервала. • Прерывание по переполнению счетчика внешних событий. Когда счетчик внешних событий переполняется, то может генерироваться запрос на прерывание точно так же, как и для счетчика временной базы. • Прерывание по событию на входе счетчика внешних событий. Этот запрос на прерывание формируется, если сигнал на входе счетчика внешних событий изменил свое значение. Характер изменения, т.е. перепад из 0 в 1, или из 1 в 0, или любое изменение логического уровня, определяется программистом. • Прерывание от модулей контроллеров последовательного ввода/вывода SCI и SPI. Каждый модуль последовательного ввода/вывода формирует целую группу запросов на прерывание: при завершении передачи слова, при приеме слова, при обнаружении различного рода нарушений в протоколе передачи информации. • Прерывание от модуля АЦП. Модуль аналого-цифрового преобразователя формирует запрос на прерывание, когда процесс оцифровки очередного сигнала завершен, и двоичный код сигнала может быть считан в память МК. • Прерывание при выходе МК из энергосберегающих режимов. Это прерывание позволяет вывести МК из состояния STOP или WAIT, в котором он находился с целью снижения потребляемой энергии. Такие прерывания очень полезны при объединении нескольких МК в информационную сеть. Мы рассмотрим этот тип прерывания более подробно в следующем параграфе.
Модуль таймера
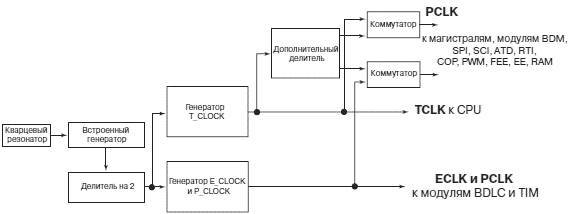
Микроконтроллеры семейства 68HC12/HCS12 имеют в своем составе модуль генератора CGM (ClockGenerationModule), который генерирует импульсные последовательности для тактирования центрального процессора, межмодульных магистралей, периферийных модулей в составе МК, а также внешние периферийные интегральные схемы. Структурная схема модуля CGM представлена на рис. 2.1.
Рис. 2.1 Структура модуля тактирования CGM
Микроконтроллеры семейства 68HC12/HCS12 используют три внутренних сигнала тактирования: TCLK, ECLK и PCLK. Эти сигналы образуются путем деления эталонной импульсной последовательности внутреннего генератора с внешним кварцевым резонатором. Сигнал TCLK предназначен для тактирования центрального процессора, импульсные последовательности ECLK и PCLK используются для тактирования межмодульных магистралей и различных периферийных модулей (рис. 2.1). Модуль тактирования CGM микроконтроллера B32 оснащен также дополнительным делителем, который позволяет существенно снизить частоту одной из импульсных последовательностей тактирования. Низкая частота тактирования таймерных модулей в некоторых применениях позволяет значительно упростить управляющую программу.
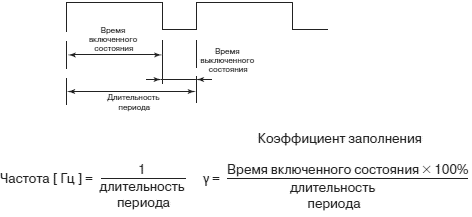
Подсистема реального времени МК семейства 68HC12/HCS12 включает основной таймерный модуль, который имеет две модификации — TIM и ECT, и отдельный таймер меток реального времени. Структура модуля таймера TIM (TimerInterfaceModule) ориентирована на реализацию трех основных функций: • Входного захвата (IC — InputCapture). Функция входного захвата позволяет производить измерения временных параметров сразу нескольких импульсных сигналов на входах МК. Подсистема входного захвата может быть настроена на измерение длительности единичного или нулевого состояния на входе порта (рис. 2.2, а), а также периода, коэффициента заполнения или частоты периодического импульсного сигнала (рис. 2.2, б).
(а)
(б) Рис. 2.2 Временные характеристики ШИМ сигнала
• Выходного сравнения (OC — OutputCompare). Функция выходного сравнения позволяет МК генерировать на нескольких выходах импульсные последовательности с заданными временными характеристиками, такими, как период и коэффициент заполнения для повторяющихся сигналов, длительность единичного или нулевого состояния для неповторяющихся сигналов. • Счетчика внешних событий (PA — PulseAccumulator). Основная функция этого счетчика — подсчет импульсов (внешних событий) на одном из входов МК. Он также может быть использован для измерения временных параметров внешнего импульсного сигнала большой длительности. Для реализации функций входного захвата/выходного сравнения (IC/OC) модуль таймера TIM использует восемь идентичных аппаратных блоков, которые принято называть каналами. Каждый из каналов посредством программных установок настраивается на реализацию режима входного захвата или выходного сравнения независимо от режима работы других каналов модуля таймера. Каждый из каналов использует общий счетчик временной базы для фиксации моментов наступления событий. Параллельная работа всех восьми каналов с одним счетчиком временной базы не вносит погрешностей в формируемые или измеряемые временные интервалы, поскольку фиксация этих интервалов реализуется на аппаратном уровне с последующим программным обслуживанием каналов по прерываниям. Каждый канал связан с одной из линий порта PORT Т. Счетчик событий PA в составе модуля TIM также связан с линией 7 порта PORT T. Поэтому линии 0…6 порта PORT T в подсистеме таймера могут использоваться или как входы IC, или как выходы OC, в то время как линия 7 порта PORT T кроме этих двух функций IC/OC может также использоваться как вход тактовых импульсов для счетчика внешних событий.
Счетчик временной базы Основным блоком модуля таймера TIM является 16 разрядный счетчик временной базы TCNT, структурная схема которого представлена на рис.5. Текущий код счетчика используется всеми каналами захвата/сравнения в качестве отсчета момента реального времени. Именно поэтому этот счетчик и называют счетчиком временной базы. Этот счетчик также называют свободно считающим счетчиком. Определение «свободно считающий» отражает следующую особенность работы счетчика. Если работа модуля таймера разрешена, то счетчик временной базы производит непрерывный счет, начиная с минимального кода $0000 до максимального кода $FFFF. При поступлении следующего тактового импульса код счетчика изменяется с $FFFF на $0000. Далее счет продолжается в порядке нарастания кода. Невозможно остановить счетчик под управлением программы, так же как и изменить коэффициент счета счетчика, равный 216. Текущее состояние счетчика отображается в двух 8-разрядных регистрах: TCNTH — старший байт счетчика, TCNTL — младший байт счетчика. В карте памяти МК эти регистры располагаются по следующим адресам: $0084 — TCNTH, $0085 — TCNTL. Вместе оба этих регистра составляют 16-разрядный регистр текущего состояния счетчика временной базы TCNT. Имя TCNT обычно объявляется в заголовочном файле.
Регистр масок таймера 2 Регистр масок таймера TMSK2 (TimerMaSKregister 2) располагается в памяти МК по адресу $008D. Формат регистра представлен на рис. 2.5. В данном параграфе мы рассмотрим лишь некоторые биты этого регистра. Бит TCRE разрешает сброс счетчика временной базы таймера. Биты PR2:PR1:PR0 устанавливают коэффициент деления программируемого делителя на входе счетчика временной базы в соответствие с таблицом 2.1. Обратите внимание, что минимальный коэффициент деления равен 1, т.е. максимальная частота тактирования счетчика равна fBUS. Максимальный коэффициент деления составляет 32. Биты PUPT и TDRB предназначены для управления схемотехникой входных и выходных буферов линий порта PORT T.
Рис. 2.5. Формат регистра TMSK2 Каналы захвата/сравнения Модуль таймера TIM содержит в себе восемь идентичных блоков захвата/сравнения, которые в микропроцессорной технике принято именовать каналами захвата/сравнения. Структурная схема аппаратных средств одного канала захвата/сравнения в составе модуля таймера МК семейства 68HC12/HCS12 представлена на рис. 2.6.
Рис. 2.6. Структура одного канала сравнения/захвата таймера и регистр выбора режима работы каналов TIOS
Каждый из восьми каналов захвата/сравнения подключен к выводу IOSn, где n — номер канала, n = 0, 1, 2…7. Если канал с номером n конфигурирован как канал захвата, то вывод IOSn автоматически подключается к одноименной линии PTn порта T. Работа в качестве входов подсистемы входного захвата или выходов подсистемы выходного сравнения является альтернативной функцией порта T. Регистр данных порта T расположен по адресу $00AE. Реализуемая каналом n модуля таймера функция (входной захват или выходное сравнение) определяется битом IOCn регистра TIOC. Регистр расположен по адресу $0080, формат регистра представлен на рис. 2.6. Если бит IOCn установлен в 1, то канал n работает в режиме выходного сравнения. Если же бит IOCn равен 0, то канал n работает в режиме входного захвата. Аппаратные средства каждого состоят из 16 разрядного регистра данных канала TCn, 16 разрядных регистра защелки и цифрового компаратора, детектора события, формирователя выходного уровня и триггера события канала (рис. 2.6). Каждый канал использует в качестве эталона реального времени общий для всех каналов счетчик временной базы. Режим входного захвата Структура аппаратных средств подсистемы входного захвата IC, которая образуется в результате конфигурирования универсального канала модуля таймера на режим захвата, представлена на рис. 10. Подсистема входного захвата запоминает код счетчика временной базы в момент изменения логического сигнала на входе IOSn (n — номер канала). Изменение логического сигнала распознается детектором события, который может быть программно настроен на один из четырех режимов работы: • Распознавание изменения сигнала с 0 на 1 — положительный фронт; • Распознавание изменения сигнала с 1 на 0 — отрицательный фронт; • Распознавание любого изменения уровня сигнала; • Соответствующий вывод МК не подключен к каналу входного захвата и является выводом порта T.
Рис. 2.7. Структура одного канала таймера в режиме входного захвата и регистры управления каналом TCTL3 и TCTL4
Если детектор определил заданное изменение входного сигнала, то говорят, что наступило событие входного захвата. В момент наступления события код счетчика временной базы запоминается в регистре защелке, одновременно устанавливается триггер события канал CnF (рис. 2.7). Триггер может быть считан программно, или генерируется запрос на прерывание, если прерывания от канала n модуля таймера разрешены. Для настройки детектора события каждого канала на один из трех перечисленных режимов используются биты EDGnB:EDGnA в регистрах TCTL3 ($008A) и TCTL4 ($008B). Формат этих регистров представлен на рис. 2.7. Таблица 2.2 устанавливает соответствие между режимом работы детектора события и кодом инициализации в разрядах EDGnB:EDGnA.
Таблица 2.2. Выбор режима работы детектора события
Подсистема входного захвата IC используемся в микропроцессорной технике для измерения различных временных характеристик импульсных сигналов, таких как период следования, коэффициент заполнения, длительность нулевого или единичного состояния. Так для того, чтобы измерить период импульсной последовательности, необходимо запомнить состояние счетчика временной базы в моменты двух соседних изменений сигнала с 0 на 1 (положительный фронт) или с 1 на 0 (отрицательный фронт). Разность этих значений и составит период повторения импульсного сигнала, выраженный в числе периодов частоты тактирования счетчика временной базы. Таким образом будет произведено измерение в относительных единицах конкретной микропроцессорной системы. Если измерение производится с целью управления, то представление временного параметра в относительных единицах обычно является достаточным. Однако, если измеренный параметр должен быть отображен на дисплее, то он должен быть представлен в универсальных единицах измерения, т.е. в микросекундах, миллисекундах и т.д. Для получения численного значения последнего необходимо полученное число относительных единиц умножить на длительность периода частоты тактирования счетчика временной базы. При программировании на Си операция умножения реализуется с использованием стандартной библиотеки. При программировании на ассемблере Вам потребуются дополнительные знания, поскольку операцию умножения необходимо будет исполнять над двухбайтовыми числами. Если детектор события распознал изменение входного сигнала, которое указано в его текущей конфигурации, то аппаратные средства канала входного захвата автоматически совершают следующие действия: 1. Текущее состояние 16-разрядного счетчика временной базы запоминается в регистре-защелке канала и сразу копируется в 16-разрядный регистр данных канала TCn (n — номер канала). Поскольку данные в регистре TCn не изменяются, то они могут быть считаны побайтно (TCnH — старший байт регистра данных канала, TCnL — младший байт регистра данных), или в двухбайтовом формате. При программировании на Си рекомендуется использовать двухбайтовый формат, используя для этого переменную в формате unsignedinteger. 2. Устанавливается флаг события канала CnF. Этот флаг «сообщает» основной программе о том, что событие произошло, и регистр данных канала TCn должен быть считан программой. 3. Если прерывания по флагу события CnF разрешены (бит CnI установлен), то генерируется запрос на прерывание. Подсистема входного захвата может быть настроена для реализации разнообразных функций. Рассмотрим пример измерения длительности единичного состояния входного сигнала, т.е. импульса положительной полярности. Предположим, что длительность импульса не превышает периода переполнения счетчика временной базы таймера, исследуемая импульсная последовательность поступает на вход канала 2 модуля таймера, который предварительно настроен в режим входного захвата. Тогда для измерения длительности импульса должна быть реализована следующая последовательность действий: 1. Управляющая программа устанавливает режим работы детектора событий канала 2. Должен быть выбран режим мониторинга нарастающего фронта входного сигнала. Для этого следует установить биты EDG2B:EDG2A в регистрах TCTL3:TCTL4 в состояние 01. 2. Управляющая программа контролирует состояние триггера события C2F. 3. Если триггер C2F установился в 1, то контролируемый сигнал на линии PT2 изменился с 0 на 1. В момент изменения код счетчика временной базы был автоматически переписан в регистр защелку канала 2. Теперь этот код доступен для чтения из регистра данных TC2. 4. Управляющая программа обнаруживает, что триггер C2F установился. Тогда программа считывает двухбайтовый код из регистра данных канала TC2 и записывает его в двухбайтовую беззнаковую переменную rising_edge. 5. Управляющая программа сбрасывает триггер события C2F посредством записи в бит C2F единицы. 6. Управляющая программа изменяет режим работы детектора событий канала 2. Должен быть выбран режим мониторинга отрицательного фронта входного сигнала. Для этого следует установить биты EDG2B:EDG2A в регистрах TCTL3:TCTL4 в состояние 10. 7. Управляющая программа контролирует состояние триггера события C2F. 8. Если триггер C2F установился в 1, то сигнал на линии PT2 изменился с 1 на 0. В момент изменения код счетчика временной базы был опять автоматически переписан в регистр защелку канала 2. 9. Управляющая программа обнаруживает установленный триггер C2F, считывает двухбайтовый код из регистра данных канала TC2 и записывает его в двухбайтовую беззнаковую переменную falling_edge. 10. Управляющая программа сбрасывает триггер события C2F посредством записи в бит C2F единицы. 11. Управляющая программа вычисляет число периодов частоты тактирования счетчика временной базы между положительным и отрицательным фронтами исследуемого сигнала: TIME = falling_edge – rising_edge. Это число и есть искомая длительность импульса положительной полярности сигнала на входе PT2, выраженная числом периодов частоты тактирования счетчика временной базы. 12. При необходимости длительность импульса может быть представлена в общепринятых единицах измерения времени. Для этого управляющая программа должна выполнить операцию умножения числа TIME на длительность единицы измерения времени таймера, т.е. на длительность периода частоты тактирования счетчика временной базы: tIZM = TIME×1/fBASE. Регистры специальных функций, связанные с подсистемой входного захвата, мы обсудим позже, после рассмотрения подсистемы выходного сравнения. Режим выходного сравнения Подсистема выходного сравнения OC используемся в микропроцессорной технике для генерации на выводах МК импульсных сигналов с заданными временными характеристиками. Например, средствами подсистемы выходного сравнения может быть сформирован одиночный импульс предварительно вычисленной длительности, или импульсная последовательность определенной частоты с регулируемым по результатам расчетов в МК коэффициентом заполнения. Структура аппаратных средств подсистемы выходного сравнения OC, которая образуется после конфигурирования универсального канала модуля таймера на режим сравнения, представлена на рис. 2.8.
Рис. 2.8. Структура одного канала таймера в режиме выходного сравнения и регистры управления каналом TCTL1 и TCTL2
Цифровой компаратор подсистемы выходного сравнения непрерывно сравнивает код счетчика временной базы с 16 разрядным кодом в регистре данных канала TCn (n — номер канала). Момент равенства кодов в микропроцессорной технике называют событием выходного сравнения. Если цифровой компаратор определил равенство кодов, то аппаратные средства канала выходного сравнения автоматически совершают следующие действия: 1. Устанавливается флаг события канала CnF. Обратите внимание, события входного захвата и выходного сравнения отмечаются одним и тем же флагом. Это флаг события канала CnF. Смысловое значение флага (IC или OC) определяется ранее выбранным в процессе инициализации режимом работы канала. Флаг CnF «сообщает» основной программе о том, что событие выходного сравнения произошло, и в регистр данных канала TCn следует записать новое значение кода для сравнения. 2. Если прерывания по флагу события CnF разрешены (бит CnI установлен), то генерируется запрос на прерывание. 3. Формирователь уровня генерирует на выводе канала IOSn предварительно заданный логический уровень. Формирователь уровня в процессе инициализации может быть программно настроен на один из четырех режимов работы: • Установка вывода в 1; • Установка вывода в 0; • Инвертирование уровня сигнала на выводе; • Соответствующий вывод МК не подключен к каналу выходного сравнения и является выводом порта T.
Таблица 2.3. Выбор режима работы формирователя уровня
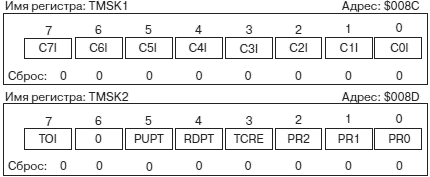
Для настройки формирователя уровня каждого канала на один из трех перечисленных режимов работы используются биты OMn:OLn в регистрах TCTL1 ($0088) и TCTL2 ($0089). Формат этих регистров представлен на рис. 2.8. Таблица 3.3 устанавливает соответствие между режимом работы формирователя уровня и кодом инициализации в разрядах OMn:OLn. Рассмотрим последовательность действий, которая должна быть реализована для генерации средствами подсистемы выходного сравнения «отрицательного» импульса заданной длительности. Под «отрицательным» импульсом мы будем понимать низкий логический уровень сигнала с последующим его изменением на высокий логический уровень. 1. Управляющая программа считывает текущее состояние счетчика временной базы из двухбайтового регистра TCNT. 2. Управляющая программа устанавливает выход используемого канала в 0. 3. Управляющая программа вычисляет длительность временного интервала, в течение которого на выходе должен удерживаться низкий логический уровень. Обратите внимание, полученная длительность временного интервала должна быть представлена в числе периодов тактирования счетчика временной базы. 4. Управляющая программа производит сложение ранее считанного кода счетчика и полученного кода длительности временного интервала. Полученное значение записывается в регистр данных канала выходного сравнения. 5. Управляющая программа задает режим работы формирователя уровня канала. Целесообразно выбрать режим установки выхода в 1, для чего необходимо записать в разряды OMn:OLn регистров TCTL1: TCTL2 комбинацию 11 (см. таблица 3.3). 6. Когда значение кода регистра данных совпадет с кодом счетчика временной базы, на выходе канала выходного сравнения автоматически, без участия программ установится 1. Регистр масок таймера 1 Регистр масок таймера TMSK1 (TimerMaskRegister 1) располагается в памяти МК по адресу $008C. Формат регистра приведен на рис. 2.11. Каждый бит этого регистра CnI разрешает или запрещает прерывания по событию в одноименном (с номером n) канале таймера. Если бит CnI равен 1, то прерывания разрешены. При CnI = 0 прерывания по событию в канале запрещены.
Рис. 2.11. Формат регистров масок таймера:TMSK1, TMSK2
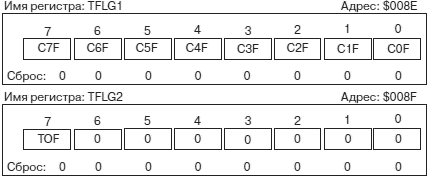
Регистр масок таймера 2 Регистр масок таймера TMSK2 (TimerMaskRegister 2) располагается в памяти МК по адресу $008D. Формат регистра приведен на рис. 2.11. Бит TOI разрешает прерывания по флагу переполнения счетчика временной базы TOF. Бит TCRE разрешает сброс счетчика временной базы. Биты PR2:PR1:PR0 устанавливают коэффициент деления программируемого делителя на входе счетчика временной базы в соответствие с таблицой1. Регистр флагов таймера 1 Регистр флагов таймера TFLG1 (TimerFlagRegister 1) располагается в памяти МК по адресу $008E. Формат регистра представлен на рис. 2.12. Каждому каналу таймера поставлен в соответствие флаг события CnF. Флаг CnF устанавливается в 1 автоматически, если в канале произошло событие входного захвата или выходного сравнения, в зависимости от текущего режима работы канала. Установленный бит события CnF вызовет прерывание, если в регистре TMSK1 установлен одноименный бит разрешения прерывания. Флаг события CnF должен быть сброшен под управлением программы, для чего в бит CnF должна быть записана 1. Существует альтернативный способ для сброса флагов события CnF. Если бит TFFCA в регистре TSCR установлен, то чтение или запись в регистр данных канала автоматически сбрасывает бит события этого канала.
Рис. 2.12. Формат регистров флагов таймера:TFLG1, TFLG2
Регистр флагов таймера 2 Регистр флагов таймера TFLG2 (TimerFlagRegister 2) располагается в памяти МК по адресу $008F. Формат регистра представлен на рис. 2.12. В регистре присутствует всего один флаг — флаг переполнения счетчика временной базы TOF. Этот флаг сбрасывается посредством записи 1 в уже установленный бит TOF. Порядок выполнения работы
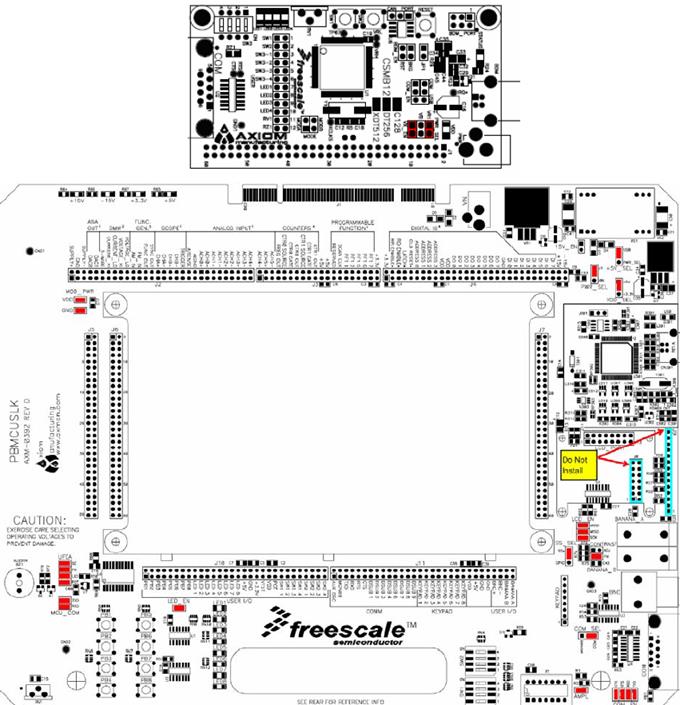
1. Осторожно вставьте отладочную плату APS12C128 на платформу PBMCUSLK. 2. Соотвтственно с рисунком 3.1 ставим перемычки рабочей платы CSMB12С128 и PBMCUSLK.
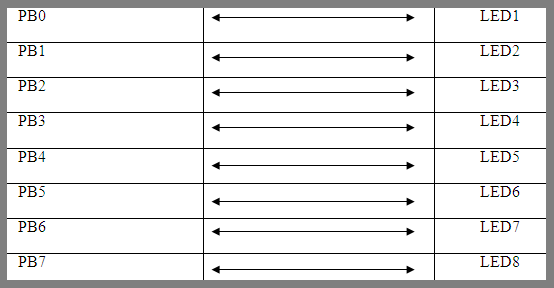
Рис. 3.1. Конфигурация расположения перемычек на платах CSMB12С128 и PBMCUSL при их совместном использовании с компьютером 3. Подсоединяем одладочную плату к компьютеру через порт USB 4. По ниже веденного схемы соедините порт В микроконтроллера к светодиодам платформы PBMCUSLK.
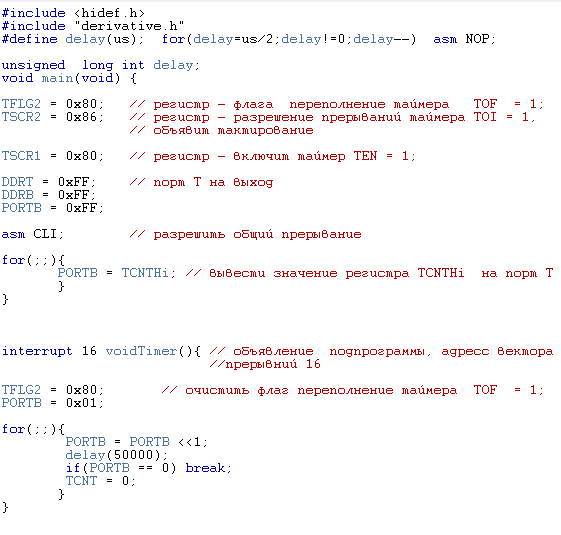
5. Проверте переключатели платы APS12C128 платы. Они дольжны быть в выключенном ввиде. 6. Включите компьютер и дайте ему загрузиться. 7. По этому ссылку запускаем CodeWarrior:. Пуск – Все программы – Freescaler CodeWarrior - CodeWarrior Development Studio for S12(X) – CodeWarrior IDE. 8. Создаем новый проект. В качестве языка программирования выбираем язык Си. 9. В окно текстового редактора рабочего среды CodeWarrior IDE, напишем ниже приведенный программный код.
10. С помощью команды “MAKE” проверяем написанный код программы. 11. Если проверка прошло успешно, нажимаем “DEBUG”. 12. В появившимся новом окне под названием True-Time Simulator & Real-Time Debugge, нажимаем “OK” и после прошивки программы нажимаем кнопку “Start/Continue (F5)”. 13. Закрываем окно True-Time Simulator & Real-Time Debugger, и анализируем полученный результат. Выполните следующие задания: 1. Тактирование счета Таймера поставьте на 32, и проверьте загорание светодиодов. Какие изменения прослеживаются? Объясните. 2. С помощью Таймера выведите прямоугольный сигнал с частотой 15Гц.
Вопросы для проверки: 1. Что такое прерывание? 2. Регистры конфигураций таймера. 3. В чем отличие 10 разрядного таймера от 8 разрядного? 4. Обесните алгоритм работы таймера?
Литература: 1. Иди Ф., Сетевой и межсетевой обмен данными с микроконтроллерами - Додэка-XXI,2007 Модуль таймера Цель работы: Изучение работы счётчика временных интервалов(таймер).
Приборы и принадлежности: 1. Плата CSMB12С128; 2. Платформа PBMCUSLK; 3. Персональный компьютер; 4. Проводы;
Прерывание Программно логическая модель центрального процессора содержит регистр признаков CCR, формат которого представлен на рис. 1.1 Особенностью всех семейств МК от компании FreescaleSemiconductor является наличие в регистре признаков не только флагов результатов операции, но и дополнительных битов управления подсистемой прерывания. В составе регистра признаков МК 68HC12/HCS12 — два таких бита. Бит I — глобальная маска прерываний — используется для управления маскируемыми прерываниями. Бит X — бит запрета немаскируемых прерываний — управляет немаскируемыми прерываниями. Оба этих бита устанавливаются в 1 в состоянии сброса МК. Обратите внимание, в МК 68HC12/HCS12 установка битов I и X запрещает соответствующие прерывания.
Рис. 1.1 Формат регистра состояния CCR Немаскируемые прерывания В соответствие со своим названием немаскируемые прерывания не могут быть отключены пользователем. Однако в предыдущем абзаце было упомянуто, что установка бита X в 1 запрещает немаскируемые прерывания. Значение бита X действительно равно 1 в состоянии сброса МК. Однако далее он может быть установлен в 0 под управлением программы инициализации, разрешая тем самым немаскируемые прерывания. Далее этот бит не может быть изменен под управлением программы, и в этом его отличие от бита глобальной маски прерываний I. Три типа немаскируемых прерываний реализуются в МК 68HC12/HCS12: • Прерывание по внешнему запросу • Прерывание по несуществующему коду команды. Каждая инструкция языка ассемблер МК имеет собственный код. В МК 68HC12/HCS12 коды операций могут быть однобайтовыми и двухбайтовыми. Но не все теоретически возможные коды использованы для кодирования реальных команд процессорного ядра CPU12. Если на этапе выборки кода команды из памяти произошло считывание несуществующего кода команды, то генерируется запрос на немаскируемое прерывание. • Программное прерывание — инструкция SWI. Система команд МК 68HC12/HCS12 имеет инструкцию программного прерывания, которая позволяет перейти к исполнению подпрограммы прерывания из прикладной программы. Маскируемые прерывания • Прерывание по внешнему запросу
Рис. 1.2 Внешняя цепь для подключения сигналов нескольких внешних запросов на прерывание
• Прерывание по таймеру меток реального времени RTI. Таймер меток реального времени генерирует последовательность равноотстоящих во времени запросов на прерывание. Период повторения запросов настраивается программистом. Эти прерывания могут быть использованы для регулярного выполнения микроконтроллером некоторой задачи. Например, для измерения напряжения аккумуляторной батареи каждые три мин, чтобы сигнализировать о необходимости ее замены. Мы рассмотрим особенности прерываний RTI в главе 7 на примере управления скоростью вращения электрическим двигателем. • Прерывание по событию канала зах |
|||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-26; просмотров: 268; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.245.172 (0.012 с.) |