Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет реальных погрешностей измерения ⇐ ПредыдущаяСтр 4 из 4
Реальная погрешность измерения дальности:
где γ4 = 1…15 - коэффициент ухудшения точности измерения дальности, γ4 = 4. Потенциальная погрешность σDп определяется как:
Погрешность индикации σDинд определяется как:
где σD1 ≈ 15 м - погрешность совмещения временного положения зондирующего импульса с началом развертки индикатора; σD2» (10-4.10-5) ×D - погрешность из-за нестабильности частоты эталонного кварцевого генератора, формирующего метки дальности; примем:
σD2 = 10-6·Dмакс = 10-6·450·103 = 0.45 м σD2 = 225+0.25 = 225.25 = 226 м
Прочие погрешности σDΣ:
σD3» (10-5.10-6) ×D - погрешность, связанная с условиями распространения радиоволн; примем σD3 = 10-5:
σD3 = 10-5·Dмакс = 10-5·450·103 = 4,5м
Реальная погрешность измерения азимута:
где Потенциальная погрешность:
Суммарная погрешность индикации σαинд и прочих погрешностей σαΣ:
σα1 - погрешность определения центра отметки цели на экране индикатора:
где Δαинд - разрешающая способность индикатора по угловой координате.
σα2 ≈ 0.15·Δαшк - погрешность интерполяции при использовании только неподвижных меток азимута или "механической" шкалы; Δαшк - цена интервала между метками азимута; Δαшк =1 0
σα2 ≈ 0.15·1 = 0.15 (град)
σα3 ≈ (0.02…0.03) 0 - погрешность неточности ориентирования станции на местности; σα3 = 0.020. σα5 ≈ 0.1 0 - погрешность, связанная с неточностью установки датчика отметки опорного направления и погрешности люфтов в устройствах согласования положения антенны и развертки по азимуту. Подставим все полученные погрешности в суммарную формулу определения погрешности измерения азимута σα:
Расчет характеристик обнаружения
Характеристикой обнаружения называется зависимость вероятности правильного обнаружения сигнала, отраженного от цели, от отношения сигнал/шум при фиксированном значении ложной тревоги. В рассчитываемом проекте происходит обнаружение некогерентной пачки импульсов с прямоугольной огибающей. Условная вероятность ложного обнаружения [8, с.13] в этом случае определяется по формуле:
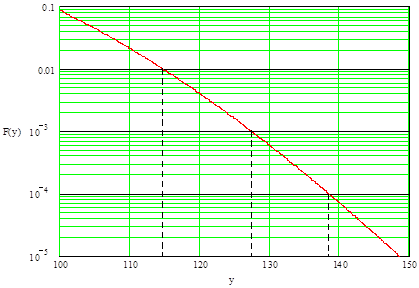
гдеy0 = u0/σ2 - относительный порог обнаружения на выходе накопителя; σ2 - дисперсия шума на входе квадратичного детектора; N - число импульсов в пачке (N = 20). Приведем график условной вероятности ложного обнаружения:
Рис. 1 График условной вероятности ложного обнаружения Моделью объекта является совокупность независимых отражателей, среди которых один отражатель значительно превышает другие по значению ЭПР, а ЭПР остальных независимых отражателей примерно равны между собой:
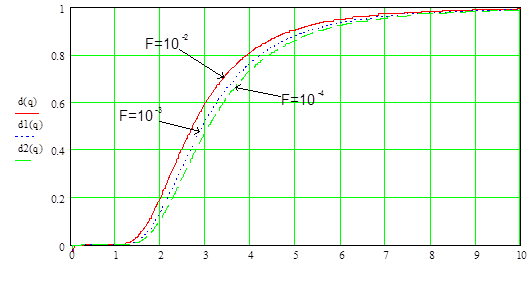
Где q - отношение сигнал-шум по напряжению по одиночному импульсу в пачке на входе квадратичного детектора; y0 = u0/σ2 - относительный порог обнаружения на выходе накопителя; σ2 - дисперсия шума на входе квадратичного детектора. Построим характеристики обнаружения для трех значений вероятности ложной тревоги, заданных в техническом задании:
FЛТ = 10-2, FЛТ = 10-3, FЛТ = 10-4
Соотношение сигнал/шум тем больше, чем больше вероятность ложной тревоги, а чем больше соотношение сигнал/шум, тем больше вероятность правильного обнаружения. На рисунке приведены характеристики обнаружения D (q).
Рис. 2 ХО для трёх вероятностей ложной тревоги
|
|||||
|
|
Последнее изменение этой страницы: 2021-04-20; просмотров: 150; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.71.142 (0.01 с.) |

 ,
, ;
;
 , σD2 =226
, σD2 =226

 ,
, - коэффициент ухудшения потенциальной точности.
- коэффициент ухудшения потенциальной точности. ;
;