Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основы работы в системе « T - Flex Динамика»
Совместно с T-FLEX CAD 3D может работать модуль динамического анализа. Модуль основан на алгоритмах разработчиков компании «Топ Системы» и позволяет производить исследование динамического поведения различных пространственных механических систем. В T-FLEX CAD 3D уже встроен модуль динамического экспресс – анализа. Он представляет собой бесплатную некоммерческую версию, предназначенную в основном для ознакомления с основным модулем. Модуль экспресс – динамики имеет некоторые ограничения по видам нагружений и по выводу результатов динамического анализа. В данном разделе описаны возможности программы и правила работы с основным модулем, а также приведён список ограничений и отличия в работе для модуля экспресс – динамики. Система динамического анализа может решать следующие задачи: · анализ траекторий движения, скоростей, ускорений любых точек компонентов механической системы под действием сил; · анализ временных характеристик механической системы (время прихода в целевую точку, время затухания колебаний и т.д.); · анализ сил, возникающих в компонентах механической системы в процессе движения (силы реакции в опорах, сочленениях и т.д.) Модель механизма описывается как система твёрдых тел, шарниров и нагрузок. Данные для анализа автоматически берутся непосредственно от созданной в системе T-FLEX CAD геометрической модели. При моделировании используются обычные инструменты T-FLEX CAD, для задания связей между трёхмерными телами используются сопряжения и степени свободы. В системе также имеются средства моделирования контактов между любыми твёрдыми телами, способные обрабатывать одновременное контактное взаимодействие сотен и тысяч твёрдых тел произвольной формы.
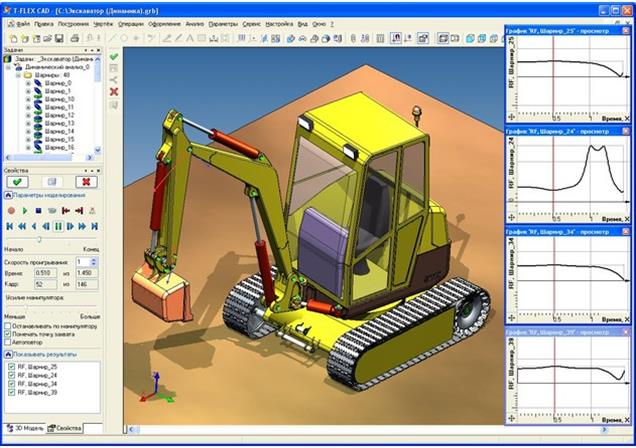
Рисунок 19 – Процесс расчёта созданной в системе T-FLEX CAD геометрической модели В качестве нагрузок для тел можно задать начальные линейные и угловые скорости, силы, моменты, пружины, гравитацию и т.д. Для считывания результатов используются специальные элементы-датчики. Работа с результатами расчёта ограничена для бесплатного модуля (отсутствуют инструменты для получения численных результатов расчёта). В коммерческом модуле результаты расчёта выдаются в виде графиков, динамических векторов-стрелок и в виде массива чисел (точки графика). Для анализа доступны многие величины: координаты, скорости, ускорения, силы реакций в шарнирах, усилия в пружинах и т.д. Непосредственно в процессе расчёта пользователь может наблюдать за поведением модели с любой точки (Рисунок 19). По готовым результатам динамического расчёта можно создавать анимационные ролики.
Структура задачи динамического расчёта Команды динамического анализа доступны в меню «Анализ». В этом меню также присутствуют команды для конечно-элементного анализа. Некоторые из них являются общими для обоих типов задач. Для выполнения динамического расчёта пользователь создаёт задачу динамического анализа. Она формируется из следующих компонентов: · свойства и настройки задачи; · тела задачи; · шарниры; · датчики; · нагружения; · результаты. Шарниры Шарниры определяют связи и взаимодействия между отдельными телами в задаче динамического анализа. Они создаются в задаче автоматически на основе заданных в модели степеней свободы и сопряжений. В основных типах шарниров система позволяет моделировать трение, а в односторонних контактах также задавать параметры удара. На данный момент в системе реализованы следующие типы шарниров приведенных ниже. Сферический шарнир. Разрешены повороты во всех направлениях и запрещены все перемещения. Вращательный шарнир. Разрешено только вращение вокруг определенной оси. Остальные перемещения и направления поворотов запрещены. Имитирует дверную петлю. Цилиндрический шарнир. Разрешено вращение вокруг определенной оси и перемещение вдоль неё. Поступательный шарнир. Разрешено только перемещение в определенном направлении. Винтовой шарнир. Имитирует винтовое соединение. Создается на основе передаточных связей. Разрешен поворот вокруг одной оси с одновременным перемещением вдоль нее. Контактный шарнир. Контактные шарниры задают отношение между парой элементов тел, связанных другими шарнирами. Контактные пары могут быть различными: точка-точка, точка-кривая, прямая-плоскость, плоскость-тело, плоскость-плоскость и т.д. Отношение может быть касанием, расстоянием, либо расстоянием с неравенством (в последнем случае контактный шарнир является односторонним).
Неопределенный шарнир. Все остальные сочетания связей, которые система не смогла определить как известные ей шарниры она все равно в задаче учитывает и превращает в неопределенный шарнир. Такие связи считаются идеальными, для них нельзя задавать параметры трения. Каждый тип шарнира имеет определенные свойства, которые пользователь может регулировать. Например, геометрические размеры, параметры трения и т.д. Контакты между телами Одной из особенностей системы является реалистичное моделирование контактов между телами сборки. Пользователь освобождён от необходимости задавать точки контакта самостоятельно. Имеется возможность задавать системе, контакты каких тел она должна посчитать, а каких – нет, а также параметры удара и трения отдельно для каждой пары тел. Все расчёты производятся самой системой на основе точной геометрии тел (используются геометрические данные ядра Parasolid). Таким образом, система позволяет реалистичное моделирование контакта между абсолютно любыми телами. Для шарниров на данный момент в системе реализованы следующие параметры, описывающие контакты между шарнирами, которые приведены ниже: · Коэффициенты трения покоя, трения движения и вязкого трения; · Натяг. Для некоторых типов шарниров можно учесть соединение деталей с натягом. Это означает, что соединение деталей производится с некоторым дополнительным усилием и упругими деформациями, вызванными несовпадением посадочных размеров. Параметр имеет размерность силы, он определяет дополнительную реакцию в шарнире, которая будет учитываться при расчёте сил трения; · Геометрические размеры шарнира учитываются при расчёте трения в шарнире. Для контактов в системе реализованы следующие параметры, описывающие контакты между телами, которые приведены ниже: · Коэффициенты трения покоя, движения, качения и верчения; · Коэффициент восстановления при ударе характеризует степень сохранения механической энергии тел после соударения; · Минимальная скорость, с которой начинает действовать упругое соударение (слабый удар считается неупругим). Нагружения Нагружения - это специальные объекты, которые создаются пользователем пред выполнением расчёта. В качестве нагружений можно задавать силы, моменты и вращения. Для отдельных тел можно задавать линейную и угловую скорости, которые они имеют в начальный момент. Особый вид нагружения – пружины. Благодаря возможности задания жесткости при помощи графика этот вид нагружения позволяет задавать в общем случае не только пружины, но и биполярные силы с произвольными законами. На данный момент в системе реализованы следующие типы нагружений приведенных ниже. Гравитация. Система позволяет учесть в расчёте любое значение ускорения свободного падения в произвольном направлении. Начальная скорость. Пользователь имеет возможность задать начальную скорость для любых тел задачи. По умолчанию скорости тел в начале моделирования равны нулю Точечная сила создаёт силу, действующую в заданном направлении. Сила может быть задана значением или графиком. В последнем случае можно задать переменное значение, зависящее от времени или датчика.
Биполярный силовой элемент (пружина) позволяет создавать пружины, демпферы или произвольные биполярные точечные силы, задаваемые графиком. Также при помощи данного нагружения можно моделировать линейный привод, толкающий два тела с заданной скоростью или ускорением. Это позволяет моделировать, например, работу гидроцилиндра Вращение позволяет создать привод, вращающий тело вокруг заданной оси с заданной угловой скоростью. Максимальный крутящий момент, развиваемый приводом, по желанию пользователя, может быть ограничен. Момент позволяет задать вектор внешнего момента, действующего на тело. Параметры трения и удара. Система может моделировать свойства взаимодействия между элементами системы.
Датчики Специальные объекты задачи динамического анализа, предназначенные для считывания и передачи результатов расчёта на средства отображения результатов. Датчики могут быть нескольких типов, в зависимости от объекта измерения: · датчик в точке; · датчик в шарнире; · датчик на теле; · датчик для измерения расстояний между двумя объектами; · датчик «Пара тел». Результаты Записываются на основе считанных датчиками показаний или отображаются в виде графических знаков (стрелок) непосредственно во время выполнения расчёта. Результаты обычно хранятся в виде графиков. Настройки задачи Расчёт выполняется методом вычисления состояния системы по кадрам. Для каждого кадра запоминается информация о состоянии системы. Для расчёта каждого кадра записи система совершает некоторое количество шагов моделирования, это может быть один шаг на каждый кадр, а может быть тысяча. Пользователь может задать штатное количество шагов, которое система будет использовать (Рисунок 20). В случае если штатного количества шагов в кадре не хватает для обеспечения точности, система будет их увеличивать вплоть до максимального значения, также указываемого пользователем.
Рисунок 20 – Параметры моделирования Практическое упражнение № 2
|
|||||||
|
|
Последнее изменение этой страницы: 2020-11-23; просмотров: 194; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.44.23 (0.017 с.) |