Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вывод формулы погрешности от несогласования реостатного датчика с усилителем
Питание реостатного датчика линейного перемещения l осуществляется от источника напряжения Е, как показано на рисунке 2.11. Выходное напряжение датчика передается на вход электронного усилителя, входное сопротивление которого R у ³100 кОм.
Рисунок 2.11 – Схема подключения датчика к усилителю
Функция преобразования датчика линейная, т. е. Rx = Sl, где Rx – сопротивление между перемещающимся контактом и нижним выводом датчика, S = 50 Ом/мм – номинальная чувствительность датчика. Максимальное сопротивление датчика R max = 103 Ом. Вывести формулу для определения погрешности от несогласования датчика с усилителем. Оценить характер зависимости от измеряемой величины абсолютной погрешности от несогласования e(l) и представить ее график. Решение По определению относительная погрешность от несогласования
Для данной схемы, принимая внутреннее сопротивление источника Е близким к нулю, получим эквивалентную схему для расчета выходного сопротивления (рисунок 2.12) Выходное сопротивление есть эквивалентное сопротивление относительно выхода датчика и определяется сопротивлением параллельной цепи, состоящей из двух частей Rx и (R max – Rx). Формула для выходного сопротивления имеет вид
Тогда относительное значение погрешности в функции измеряемой величины
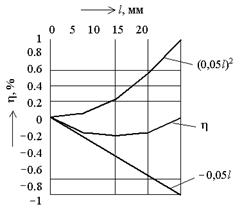
Выразим погрешность в процентах В полученных формулах перемещение l выражается в мм. Исходя из заданных условий, максимальное перемещение равно l mах = Rx max/ S = 20 мм. Для графического представления погрешности от нелинейности диапазон разобьем на четыре участка (пять точек). Очевидно, что при l = 0 погрешность равна нулю. Расчетные значения в остальных точках для построения графика h(l) приведены в таблице 2.1. Таблица 2.1
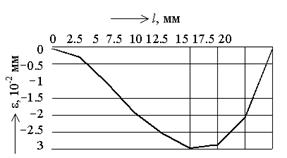
Абсолютная погрешность от несогласования, приведенная ко входу определяется выражением
Расчетные значения в отдельных точках для построения графика e(l) приведены в таблице 2.2.
Таблица 2.2
По приведенным в таблицах данным строят графики, изображенные на рисунке 2.13.
Рисунок 2.13 – Графики погрешности от несогласования:
Рис. 2.13 – Окончание
Задача 2.8
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 53; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.16.1.82 (0.006 с.) |

 , где R вых – выходное сопротивление датчика; R y – входное сопротивление усилителя. Полагаем, что R y >> R вых.
, где R вых – выходное сопротивление датчика; R y – входное сопротивление усилителя. Полагаем, что R y >> R вых.
 .
. .
.
 .
.