
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Моделирование синхронных машин.
3.5.1. ОБЩИЕ СВЕДЕНИЯ О ТЕОРИИ ЭЛЕКТРИЧЕСКИХ В лекции рассмотрены вопросы конструкции, режимов и принципа работы синхронной машины при различной нагрузке. Представлены схемы замещения и векторные диаграммы синхронной машины
Синхронной машиной вращательного действия называют машину переменного тока, в которой скорость вращения ротора равна скорости вращения магнитного поля в ее рабочем зазоре. Широкое использование синхронные машины получили в качестве генератора напряжения, благодаря стабильной скорости вращения их используют на электростанциях для выработки электроэнергии. Часто синхронную машину используют в различного рода приводах для вращения исполнительного механизма с заданной угловой скоростью. Кроме этого, синхронную машину используют как компенсатор для повышения коэффициента мощности питающей электрической сети, а также для регулирования ее реактивной составляющей. Конструкция синхронной машины вращательного действия во многом схожа с конструкцией асинхронного двигателя. Основное отличие заключается в конструкции ротора, который представляет собой по существу явнополюсный или неявнополюсный электромагнит (рис. 3.49), обмотка которого через контактные кольца и щетки питается от внешнего источника постоянного тока. В качестве индуктора в синхронной машине может использоваться постоянный магнит. Явнополюсный ротор обычно используется в машинах с большим числом пар полюсов. Обмотка возбуждения выполняется в этом случае в виде цилиндрических катушек прямоугольного сечения, которые размещаются на сердечниках полюсов и укрепляются при помощи полюсных наконечников.
Неявнополюсный ротор применяют, как правило, для двигателей большой мощности, работающие при скорости вращения ротора 1500 и 3000 об/мин. Применение в них явнополюсного ротора невозможно по условиям обеспечения необходимой механической прочности крепления полюсов и обмотки возбуждения. Синхронная машина является обратимой, т.е. она может работать как в режиме генератора, так и в режиме двигателя. Для этого ротор синхронной машины приводится во вращение отдельным двигателем, а статорная обмотка не нагружена. В этом случае синхронная машина работает в режиме генератора при холостом ходе. В этом режиме магнитный поток создается только обмоткой возбуждения. Этот поток направлен по оси полюсов ротора и индуктирует в фазах обмотки статора э.д.с.:
При небольших токах возбуждения магнитный поток мал и стальные участки магнитопровода машины не насыщены, вследствие чего их магнитное сопротивление мало. При этом магнитный поток определяется только магнитным сопротивлением воздушного зазора между ротором и статором и характеристика холостого хода
Номинальный режим работы синхронных генераторов приблизительно соответствует перегибу (колену) кривой характеристики холостого хода; при этом коэффициент насыщения Синхронная машина может работать как генератор при трех типичных условиях: · работа на пассивную нагрузку; · работа на жесткую сеть (сеть бесконечной мощности); · работа на мягкую сеть (сеть, мощность которой соизмерима с мощностью синхронной машины).
Схема замещения включает:
В явнополюсной машине ось, совпадающую с осью магнитного поля возбуждения (ротора) называют продольной и обозначают буковой d, а перпендикулярную ей ось называют поперечной и обозначают буковой q. Различают синхронные реактивные сопротивления по продольным и поперечным осям:
Активное сопротивление
Потокосцепление · для активной нагрузки · для индуктивной нагрузки · для емкостной нагрузки · для активно-индуктивной нагрузки · для активно емкостной нагрузки При работе синхронной машины на жесткую сеть необходимо соблюдать условия синхронизации: · величина э.д.с. · скорость вращения генератора должна быть равна · целесообразно подавать напряжение на обмотку возбуждения при достижении подсинхронной скорости вращения ротора синхронной машины. В режиме холостого хода машина не генерирует и не потребляет мощности. Любое изменение тока возбуждения и связанной с ним э.д.с. В двигательном режиме машина потребляет реактивную (емкостную) мощность до тех пор, пока Выходная активная мощность синхронного генератора определяется по выражению:
Электромагнитный момент, возникающий в результате взаимодействия тока статора с результирующим магнитным полем, определится выражением [6]:
Первая составляющая полученной суммы является основным (электромагнитным) моментом, а вторая – реактивным моментом, возникающим вследствие неравенства продольной и поперечной синхронных индуктивных сопротивлений в явнополюсной синхронной машине. Зависимость (3.70) называют угловой характеристикой синхронной машины, эта характеристика показана на рис. 3.53. Работа синхронной машины в диапазоне изменения угла
Для неявнополюсной машины форма угловой характеристики соответствует кривой 1, в случае явнополюсной машины – кривая 2 (кривая 3 соответствует реактивному моменту). При Аналогичные процессы протекают и у синхронного двигателя, когда Рабочие характеристики синхронного двигателя представляют собой зависимости тока
Вопросы для самопроверки. 1. Назначение, область применения, конструкция и принцип действия синхронной машины. 2.Укажите режимы работы синхронной машины. 3.Какой вид имеют механическая и рабочие характеристики машины. 4. Какая зависимость называется угловой характеристикой синхронной машины. 5. В какой режиме работы синхронный двигатель может генерировать реактивную мощность? 3.5.2. ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ СИНХРОННОЙ В данном разделе представлены имитационные модели синхронной машины в генераторном и двигательном режиме работы с использованием библиотеки SimPowerSystems. Выполнен расчет имитационных моделей в программе MatLab и приведены результаты моделирования.
Модель для исследования основных характеристик синхронного генератора, работающего на пассивную нагрузку, представлена на рис. 3.55. В качестве примера рассмотрена синхронная машина типа 150HP [6], имеющая следующие характеристики: · явнополюсный ротор; · полная мощность · действующее значение линейного напряжения · частота · ток возбуждения · активное сопротивление статорной обмотки · активное сопротивление обмотки возбуждения · активное сопротивление демпферной обмотки и ее индуктивности по оси d · момент инерции Значение начальных условий приняты не нулевыми для сокращения времени моделирования. Значение напряжения возбуждения необходимо задать таким же, как и на входе Для измерения переменных состояния машины используется блок
В качестве измеряемых величин выбраны: ток возбуждения, А; скорость вращения ротора, Осциллограммы действующего напряжения на выходе генератора и установившегося значения скорости приведены на рис. 3.56.
Регулировочная характеристика строится при постоянных выходном напряжении, коэффициенте мощности и частоте. Она показывает, как необходимо регулировать ток синхронного генератора, чтобы при изменении нагрузки выходное напряжение оставалось неизменным. Снятие характеристики производится следующим образом: изменяется ток нагрузки и для каждого из его значений величина Угловая характеристика синхронной машины представляет собой зависимость момента на валу машины от электрического угла между осью магнитного поля и осью d ротора. Для исследования угловой характеристики синхронная машина подключается к электрической сети бесконечной мощности. Изменение вращающего момента на валу можно осуществлять изменением механической мощности
Вопросы для самопроверки. 1. Укажите название и значения параметров блоков источника питания, синхронной машины. 2.Каким образом для синхронного генератора в имитационной модели задается нагрузка? 3. Каким образом для синхронного двигателя в имитационной модели задается нагрузка? 4. При каких условиях производится исследование угловой характеристики. 5. При каких условиях производится исследование характеристики холостого хода и регулировочных характеристик синхронного генератора?
|
|||||||||||||
|
|
Последнее изменение этой страницы: 2020-11-11; просмотров: 265; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.1.136 (0.062 с.) |

 . (3.67)
. (3.67) принимает вид прямой линии (рис. 3.50). При дальнейшем возрастании магнитного потока растет магнитное сопротивление стальных участков магнитопроводов. При индукции в стали более 1.7-1.8 Тл магнитное сопротивление стали резко возрастает, появляется эффект насыщения и характеристика холостого хода становится нелинейной. При рассмотрении работы синхронной машины для облегчения математического анализа не учитывают нелинейность кривой холостого хода, заменяя ее прямой линией.
принимает вид прямой линии (рис. 3.50). При дальнейшем возрастании магнитного потока растет магнитное сопротивление стальных участков магнитопроводов. При индукции в стали более 1.7-1.8 Тл магнитное сопротивление стали резко возрастает, появляется эффект насыщения и характеристика холостого хода становится нелинейной. При рассмотрении работы синхронной машины для облегчения математического анализа не учитывают нелинейность кривой холостого хода, заменяя ее прямой линией. Спрямленную характеристику проводят или как касательную к кривой холостого хода (прямая 1), или через точку b, соответствующую номинальному режиму работы (прямая 2).
Спрямленную характеристику проводят или как касательную к кривой холостого хода (прямая 1), или через точку b, соответствующую номинальному режиму работы (прямая 2). составляет
составляет  При работе синхронной машины на пассивную нагрузку по обмотке статора (якоря) протекает ток нагрузки. Этот ток создает поток якоря, который пронизывает ротор. Схема замещения синхронного генератора представлена на рис. 3.51.
При работе синхронной машины на пассивную нагрузку по обмотке статора (якоря) протекает ток нагрузки. Этот ток создает поток якоря, который пронизывает ротор. Схема замещения синхронного генератора представлена на рис. 3.51. - э.д.с. индуктированная магнитным потоком возбуждения в обмотке якоря;
- э.д.с. индуктированная магнитным потоком возбуждения в обмотке якоря; - синхронное реактивное сопротивление якоря, в котором
- синхронное реактивное сопротивление якоря, в котором  реактивное сопротивление якоря и
реактивное сопротивление якоря и  реактивное сопротивление рассеяния якоря;
реактивное сопротивление рассеяния якоря; - активное сопротивление обмотки якоря.
- активное сопротивление обмотки якоря. ,
,  . (3.68)
. (3.68) Векторная диаграмма строится во вращающейся системе координат d-q (рис. 3.52).
Векторная диаграмма строится во вращающейся системе координат d-q (рис. 3.52). имеет то же направление, что и ток
имеет то же направление, что и ток  в соответствии с законом Ома для магнитной цепи. Потокосцепление воздушного зазора по сути представляет собой сумму потокосцеплений
в соответствии с законом Ома для магнитной цепи. Потокосцепление воздушного зазора по сути представляет собой сумму потокосцеплений  . Угол момента
. Угол момента  отсчитывается от вектора потока воздушного зазора до продольной оси. В генераторном режиме работы напряжение на пассивной нагрузке
отсчитывается от вектора потока воздушного зазора до продольной оси. В генераторном режиме работы напряжение на пассивной нагрузке  зависит как от величины тока нагрузки, так и от сдвига по фазе
зависит как от величины тока нагрузки, так и от сдвига по фазе  между векторами
между векторами  ;
; ;
; ;
; ;
; .
. должна быть равна напряжению
должна быть равна напряжению  сети;
сети; , с тем чтобы частота э.д.с. в точности совпадала с частотой сети
, с тем чтобы частота э.д.с. в точности совпадала с частотой сети  ;
; и реактивную (индуктивную) мощность при
и реактивную (индуктивную) мощность при  . (3.69)
. (3.69) . (3.70)
. (3.70) устойчива, т.к. при любом увеличении или уменьшении нагрузки соответственно увеличивается или уменьшается момент на валу машины и устанавливается равновесие между моментом, развиваемым двигателем, и генератором. При
устойчива, т.к. при любом увеличении или уменьшении нагрузки соответственно увеличивается или уменьшается момент на валу машины и устанавливается равновесие между моментом, развиваемым двигателем, и генератором. При  наблюдается максимальное значение развиваемой мощности и момента на валу синхронной машины.
наблюдается максимальное значение развиваемой мощности и момента на валу синхронной машины.
 синхронная машина находится в неустойчивом состоянии. При работе в режиме генератора вращающий момент, развиваемый первичным двигателем, превышает максимальный тормозящий момент генератора, т.к. увеличение угла
синхронная машина находится в неустойчивом состоянии. При работе в режиме генератора вращающий момент, развиваемый первичным двигателем, превышает максимальный тормозящий момент генератора, т.к. увеличение угла  приведет не к увеличению момента, а к его уменьшению. В результате нарушается равновесие между моментами: тормозящим моментом генератора и вращающим первичного двигателя. Избыток вращающего момента приведет к еще большему увеличению
приведет не к увеличению момента, а к его уменьшению. В результате нарушается равновесие между моментами: тормозящим моментом генератора и вращающим первичного двигателя. Избыток вращающего момента приведет к еще большему увеличению  , потребляемой мощности
, потребляемой мощности  , КПД
, КПД  и коэффициента мощности
и коэффициента мощности  от отдаваемой полезной мощности
от отдаваемой полезной мощности  при
при  и неизменном токе возбуждения (рис. 13.6).
и неизменном токе возбуждения (рис. 13.6).
 ;
; ;
; ;
; ;
; , индуктивность рассеяния
, индуктивность рассеяния  и индуктивности статорной обмотки по осям d
и индуктивности статорной обмотки по осям d  и q
и q  .
. и индуктивность
и индуктивность  ;
; ,
,  и по оси q
и по оси q  ,
,  ;
; , коэффициент вязкого трения
, коэффициент вязкого трения  и число пар полюсов p=2.
и число пар полюсов p=2. машины.
машины. 
 ; электрическая мощность, Вт. Используя предложенную модель можно провести опыт холостого хода, построить внешние и регулировочную характеристики двигателя, провести исследование угловой характеристики машины.
; электрическая мощность, Вт. Используя предложенную модель можно провести опыт холостого хода, построить внешние и регулировочную характеристики двигателя, провести исследование угловой характеристики машины.
 При проведении опыта холостого хода мощность нагрузки устанавливается близкой к нулю, а затем снимается внешняя характеристика
При проведении опыта холостого хода мощность нагрузки устанавливается близкой к нулю, а затем снимается внешняя характеристика  качественно построенная на рис. 3.57а.
качественно построенная на рис. 3.57а. Внешние характеристики определяют зависимость выходного фазного напряжения синхронного генератора от тока нагрузки при неизменных токе возбуждения, коэффициента мощности
Внешние характеристики определяют зависимость выходного фазного напряжения синхронного генератора от тока нагрузки при неизменных токе возбуждения, коэффициента мощности  .Имитационная
.Имитационная 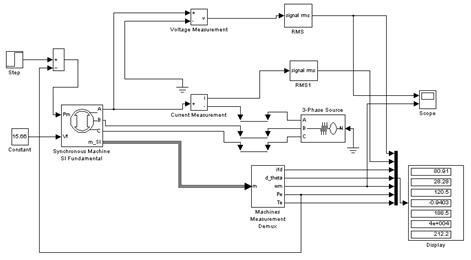
 Угловая характеристика синхронного генератора и синхронного двигателя представлена на рис. 3.60.
Угловая характеристика синхронного генератора и синхронного двигателя представлена на рис. 3.60.


