Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Устройства сравнения значений параметров
Любая система автоматического контроля (САК) или управления (САУ), независимо от своего назначения, имеет устройство сравнения (различитель), без которого невозможно реализовать отрицательную обратную связь. Устройство сравнения (сумматор, различитель, вычитающее устройство) – это элемент, выдающий сигнал ошибки ε на основании сравнения сигналов по входам заданного состояния и текущего состояния ОК или ОУ (обратная связь). На функциональных схемах устройства сравнения принято изображать как показано на рис. 2.6.1. При выполнении операции сложения (+) секторы круга сохраняют светлыми, а при вычитании (–) сектор ввода вычитаемого зачерняют или ставят знак “–“ возле стрелки ввода вычитаемого. Одновременно с операцией вычитания различитель может и усиливать сигнал, тогда его схему можно представить, как показано на рис. 2.6.2, выходной сигнал (ошибка рассогласования) ε ε=k(x1–x2), где k – постоянный коэффициент преобразования.
Рис. 2.6.1 Рис. 2.6.2 В соответствии с функциями, которые выполняют устройства сравнения, их часто называют устройствами измерения. К схемам устройств сравнения предъявляют следующие требования: 1) высокая чувствительность, которая не должна зависеть от значения и закона изменения контролируемой (регулируемой, управляемой) величины; 2) высокая точность измерений; 3) малое потребление энергии (электроэнергии), в связи с чем схема устройства сравнения электрической системы обычно имеет высокое входное сопротивление, мощность выходного сигнала должна быть большой, т. е. устройство сравнения должно иметь высокий КПД; 4) быстродействие схемы должно обеспечивать хорошее слежение за изменением измеряемой величины; 5) зона чувствительности должна быть минимальной. В системах автоматики применяются механические, пневматические, гидравлические, электромеханические и электрические устройства сравнения. Последние по принципу построения делятся на три группы: - устройства, выполненные на линейных элементах (например, на транзисторах); - устройства, выполненные на нелинейных элементах (например на L -, C - и полупроводниковых элементах); - регенеративные схемы, являющиеся сочетанием измерительного устройства с преобразованием электрического сигнала одного вида в другой.
Для сравнения аналоговых электрических сигналов на постоянном и переменном токе в качестве устройства сравнения часто применяют четырехплечие мосты (рис. 2.6.3).
Рис. 2.6.3 В три плеча этого моста включают известные сопротивления Z1, Z2, Z3, а в четвертое – сопротивление датчика Z g= F(t ºC). Сопротивления плеч моста могут быть активными и реактивными. При условии Z g ×Z 3 =Z 1× Z 2, называемым условием равновесия (баланса) моста, U иых = 0. Если контролируемая или регулируемая величина не равна заданной, то условие Zg×Z 3 =Z 1× Z 2 не выполняется, а Uвых ≠0, Uвых используется для целей управления в САУ. Чувствительность мостовой схемы по току ŋ i = | dI н|/| dZ g|, где I H→0 – ток в нагрузке Z H. Чувствительность по напряжению – ŋ u =dU вых/ dZ g. Передаточная функция моста определяется характером сопротивлений моста. В случае активных сопротивлений – элемент сравнения считается безынерционным, т.е. его передаточная функция W (s)= k. В частности, при использовании в качестве датчика температуры терморезистора схема измерителя принимает вид, показанный на рис. 16.4, а при использовании в качестве датчика термопары она имеет вид, представленный на рис. 2.6.5.
Рис. 2.6.4 Рис. 2.6.5 В том случае, когда в системе автоматики информация передается путем изменения какого-либо из параметров электрического сигнала (уровня напряжения или тока, амплитуды, фазы или частоты гармонических колебаний), используется соответствующий тип различителя (различитель уровня, фазы или частоты). Различитель уровня предназначен для измерения разности между двумя входными сигналами (например, напряжениями). Такое измерение можно осуществлять с выводом результата в форме “не равно” и “равно” или “большее” – “меньше”, в форме “меньше” – “норма” (равно) – “больше”, т. е. при этом получается качественная оценка результата сравнения. И в форме “равно” и “не равно”, но с указанием и знака неравенства, и модуля этого неравенства, получается и качественная и количественная оценка результата сравнения. Сравнение непрерывных величин обеспечивают мостовые схемы сравнения и электромагнитные (например, трансформатор (рис. 2.6.6) или магнитный усилитель).
Для различителя, выполненного по схеме трансформатора, справедливо утверждение U вых =k тр(U вх1– U вх2), где k тр – коэффициент трансформации. Параллельно-балансный каскад с усилением (рис. 2.6.7), применяемый в качестве различителя, описывается уравнением U вых =k u(U вх1– U вх2), где k u – коэффициент усиления по напряжению. В нем делители напряжения на R 1 и R 2 задают начальные смещения на базах транзисторов T 1 и T 2, а для обеспечения U вых=0 при U вх1= U вх2=0 используют переменный резистор R п.
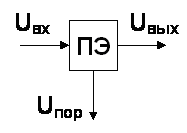
Рис. 2.6.6 Рис. 2.6.7 В этих каскадах практически отсутствует дрейф, а k u значительно выше, чем в однотактных усилителях. В аналоговых устройствах САК и САУ схемы сравнения часто называют нуль-органами, иногда компараторами. Одной из основных задач устройств измерения, предназначенных для контроля ТП, является сравнение контролируемой величины с ее верхними и нижними допустимыми значениями, заданными с помощью «уставок» X min и X max и представления качественных оценок хода ТП в форме “в норме”, “ниже нормы”, “выше нормы”. Иногда зону значений параметра ТП разделяют (рис. 2.6.8) на подобласти: оптимальную, допустимую и недопустимую. Рис. 2.6.8 Канал сравнения контролируемых величин с уставками может быть индивидуальным для каждого параметра или точки, в которой производится контроль, и общим для всех параметров или точек. В последнем случае сравнение во всех точках осуществляется последовательно во времени, т. е. циклично. Как правило, при задании двух и более числа уставок в энергетическом, аппаратурном и экономическом аспектах выгоднее использовать общее устройство сравнения, к которому с помощью коммутаторов подключаются сигналы, соответствующие контролируемым параметрам и уставкам. Устройства, задающие уставки – задатчики (формирователи уставок), могут их генерировать либо в аналоговой, либо в дискретной (цифровой) форме. В зависимости от характера сравниваемых величин выбирают и устройства сравнения. Контролируемые параметры, так же как и уставки, могут быть заданы в любом виде (например, в виде давления, перемещения и т. д.) Однако в САК и САУ унифицированными сигналами чаще всего являются напряжения, тогда в качестве устройства сравнения аналоговых величин целесообразно использовать пороговые элементы. Пороговый элемент (ПЭ, рис. 2.6.9) в автоматике – устройство (схема) с несколькими входами и одним выходом, предназначенное для сравнения значений входных величин (сигналов) с заданной величиной – порогом срабатывания. Выходной сигнал U вых может принимать только одно значение из двух возможных, “0” или “1”, и связан с входными сигналами соотношениями:
где k i – коэффициент усиления сигналов U вхi (i =1,2, …, n), U пор – порог срабатывания.
Рис. 2.6.9 Выходной сигнал Uвых может принимать только одно значение из двух возможных, “0” или “1”, и связан с входными сигналами соотношениями:
где k i – коэффициент усиления сигналов U вхi (i =1,2, …, n), U пор – порог срабатывания. Пороговый элемент (рис. 2.6.9) состоит из эмиттерного повторителя на T 1, суммирующего устройства на R 1 и R 2, усилителя на T 2 и ключа на T 3, R 6 и R 7. При R 1= R 2, если U вхi> U пор, транзистор T 2 входит в насыщение, а транзистор T 3 закрывается и напряжение через R 6 поступает на выход. Если U вхi< U пор, выходная цепь шунтирует T 3.
Эталонное напряжение e i с коллектора T 2 через суммирующий резистор R4 подается в цепь регулятора порога и через R 5 на базу T 3. Для порогового элемента справедливы соотношения:
Эталонное напряжение e i с коллектора T 2 через суммирующий резистор R4 подается в цепь регулятора порога и через R 5 на базу T 3. Для порогового элемента (рис. 2.6.10) справедливы соотношения:
При сравнении U вхс двумя уставками приемлема схема по рис. 2.6.11. Для неё справедливо: U вх – в поле между Uпн и Uпв при Uн=1 и U в=0; при U н= U в=0, U вх< U пн< U пв, т.е. – ниже U пн; и при U н= U в=1, U пн< U пв< U вх, т. е. – выше U пв.При задании допустимой и оптимальной зон пребывания параметра приемлемы устройства сравнения по схеме на рис. 2.6.11 и 2.6.12.
Рис. 2.6.10 Рис. 2.6.11
Рис. 2.6.12 Для этого устройства, при U п1< U п2< U п3< U п4, справедлива таблица истинности (табл. 2.6.1). Таблица 2.6.1
При параллельном контроле нескольких параметров по индивидуальным каналам используют схемы индикаторов наибольших (наименьших) напряжений (рис. 2.6.13 и схемы индикаторов по приоритетам. Так, для устройства по рис. 2.6.13 справедливы соотношения: при U вх1< U вх3< U вх2< U пн, U вых1= U вых2= U вых3=0; при U пн< U вх3< U вх1< U вх2, U вых1= U вых3=0, а U вых2=1; и т. д. Регулятор порога формирует пороговое напряжение Uпор в виде усиленной разности между напряжением задатчика U з и напряжением шины e max. Число сработавших ПЭ зависит от равенства U вх их экстремуму, т. е. только от U вхi max, для которого схема регулятора порога имеет вид, представленный на рис. 2.6.14.
Рис. 2.6.13 Рис. 2.6.14 Использование индикаторов наибольших (наименьших) сигналов позволяет управлять группой технологического оборудования в режиме оптимизации ТП за счет форсирующих воздействий на одни единицы оборудования и угнетающих (затормаживающих) воздействий на другие, а в целом обеспечивают синхронизацию режима их работы. Устройства сравнения цифровых систем автоматики сопоставляют коды, эквивалентные измеряемым величинам. Они применяются тогда, когда цифровое преобразование величины предшествует ее сравнению с уставкой.
Подобные устройства сравнения характеризуются высоким быстродействием, под которым понимают число сравнений в единицу времени (секунду) и числом разрядов. Достоинством цифровых схем сравнения, несмотря на некоторую сложность и более высокую стоимость, является то, что они осуществляют сравнение практически без погрешности, за исключением сбоев конечно. Наиболее распространенным способом сравнения является способ поразрядного сравнения. Для выполнения условия А=В необходимо и достаточно, чтобы содержимое одноименных разрядов как кода А, так и кода В являлось равнозначным, а условием А≠В должна быть неравнозначность хотя бы в одном (любом) разряде этих кодов. Для сравнения одноразрядных величин приемлемо устройство по схеме рис. 2.6.15. Это устройство, наряду с простотой аппаратурной реализации, обладает недостатками: отсутствие количественной оценки результата сравнения и указания знаков “<”, “=” или “>”. Вывод знака “<”, “=” или “>” обеспечивает устройство по схеме, приведенной на рис. 2.6.16. Однако одноразрядность этого устройства ограничивает его функциональные возможности. Для сравнения многоразрядных двоичных величин, с возможностью наращивания разрядности и без снижения быстродействия, но без вывода количественного результата сравнения, приемлемо устройство по схеме рис. 2.6.17, реализуемое на ИМС, например, типов К555СП1, К561ИП1, 74LS85, а с выводом количественного результата сравнения, устройство по рис. 2.6.18, реализуемое на ИМС, например, типов К500ИМ180, К502ИС1, 564ИП3, 74LS83 и др.
Рис. 2.6.15 Рис. 2.6.16
Рис. 2.6.17
Исполнительные устройства Исполнительные устройства служат для преобразования управляющего сигнала в перемещение органа регулирования. По характеру перемещения органа регулирования исполнительные устройства делятся на прямоходные и поворотные. По виду потребляемой энергии их классифицируют на гидравлические, пневматические, электрические и комбинированные (электрогидравлические и электропневматические). Наиболее надежными являются гидравлические устройства. Конструктивно гидравлические и пневматические устройства выполняются в виде мембранных, поршневых, сильфонных и лопастных устройств. Они позволяют получать наибольшее усилие для перемещения органа регулирования. К электрическим исполнительным устройствам относятся электромагнитные и электромашинные устройства. Электромагнитные исполнительные устройства – это реле, соленоиды и электромагнитные муфты. Реле – элемент, в котором изменение входной электрической величины преобразуется в механическое перемещение, замыкающее или размыкающее контакты. Электромагнитные реле применяются для переключения мощных цепей тока, и их называют контакторами. Соленоид (рис. 2.7.1)– это катушка с подвижным якорем. При подаче напряжения на соленоид (на катушку) якорь приходит в движение и перемещает орган регулирования.
Передаточная функция соленоида
где X вых(s) – перемещение якоря; T э= L 0/ R 0 – постоянная времени электромагнита; L 0 и R 0 – активное сопротивление и индуктивность катушки, соответствующее начальному положению якоря; T 1=√ m / k п (m – массаподвижных частей; k п – жесткость пружины); T 2= k д/ k п, здесь – k д – коэффициент демпфирования); k с=2 k 0 I у/ k п R 0 – коэффициент передачи соленоида (k 0 – коэффициент пропорциональности между силой электромагнита и током управления I у в катушке).
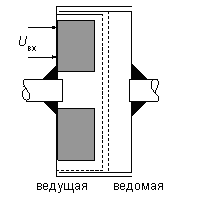
Рис. 2.7.1 В системах автоматики применяются электромагнитные муфты следующих типов: фрикционные (рис. 2.7.2), скольжения (рис. 2.7.3) и порошковые муфты (рис. 2.7.4).
Рис. 2.7.2 Рис. 2.7.3 Рис. 2.7.4 Фрикционная муфта состоит из двух полумуфт, насаженных на ведущий и ведомый валы. Ведущая полумуфта изготовлена из немагнитного материала, она механически жестко соединена с ведущим валом и содержит обмотку управления. Ведомая полумуфта изготовлена из ферромагнетика и механически, на шлицах по скользящей посадке, насажена на ведомый вал. Когда на обмотку ведущей полумуфты подается напряжение, то полумуфты притягиваются и благодаря трению между ними ведомая полумуфта приводится во вращение, перемещая орган регулирования. В муфтах скольжения полумуфты изготовлены как и в фрикционных муфтах, но ведомая полумуфта неподвижно насажена на ведомый вал, момент вращения на ведомый вал передается за счет магнитного поля, создаваемого обмоткой. При этом в результате двух магнитных полей в полумуфтах возникает момент вращения, приводящий в движение ведомый вал. Принцип действия порошковой муфты основан на изменении вязкости ферромагнитного порошка, заполняющего зазоры муфты. Когда на обмотку управления подается напряжение U у, то изменяется вязкость ферромагнитной массы и возникает сила сцепления между полумуфтами, при возрастании тока управления возрастает и момент, передаваемый на ведомый вал. При I у=0 момент М ≠0, а при М 0=0,01 М max, что объясняется наличием трения в порошке. Для обеспечения линейности зависимости M = f (I у) создают начальный ток подмагничивания. Передаточная функция порошковой муфты
где ω (s) – угловая скорость ведомого вала (рад/сек); k м – коэффициент передачи муфты, определяемый по характеристике М = f (I у); T у= L у/ R у – постоянная времени обмотки управления; T м= Jω ном/ М ном – механическая постоянная времени (здесь J – суммарный момент инерции, приведённый к ведомому валу). Если за выходную величину принять угол поворота Θ ведомого вала, то передаточная функция принимает вид
т. к. Θ=∫ωdt. Значение Т м≈0,03÷0,25 сек. К электромашинным исполнительным устройствам относятся двигатели различных типов. Двигатели постоянного тока обычно используются в системах совместно с электромашинными усилителями (ЭМУ). Для управления такими двигателями используют тиристорные преобразователи. Двигатели переменного тока применяют в системах автоматического управления (АУ) различных классов благодаря их простоте, надежности, малой инерционности и удобства управления. Из двигателей постоянного тока (рис. 2.7.5) используются двигатели с независимым возбуждением. В них управление может осуществляться или со стороны якоря (якорное управление), или со стороны обмотки возбуждения (ОВ) (полюсное управление). В первом случае U вх= U я, а U в= const, а во втором U вх= U в, а U я= const. Изменение направления и частоты вращения осуществляют путём изменения полярности и амплитуды U вх. Полюсное управление по сравнению с якорным позволяет уменьшить мощность усилительного устройства, но при этом ухудшается быстродействие. Поэтому управление со стороны якоря находит более широкое применение. Вращающий момент М вр двигателя
где Ф я – поток возбуждения, I я – ток якоря, а c 1 – коэффициент пропорциональности. При Ф я=const М вр= с' 1 I я. Если считать момент нагрузки М н=0, то М вр расходуется на преодоление инерции якоря и приводимого в движение органа регулирования, т. е.
где J – приведённый момент инерции (Н×м×с2), ω – угловая скорость вала двигателя (рад/с). Уравнение цепи якоря имеет вид
где L я и R я – индуктивность и активное сопротивление якоря, а е = с 2 ω – противо- э. д. с. Дифференциальное уравнение двигателя, связывающее скорость вращения вала с напряжением управления U я, имеет вид
где T я= L я/ R я – постоянная времени цепи якоря; T м= IR я/(c 1 c 2)= I (ω хх M п) – электромеханическая постоянная (здесь ω хх – угловая скорость якоря на холостом ходу; M п – пусковой момент двигателя), а k д=1/ с 2= ω хх/ U я ном – коэффициент передачи. Тогда передаточная функция двигателя имеет вид
Если за выходную величину двигателя считать угол поворота вала (якоря) Θ, то
Постоянная цепи якоря Т я=(2÷5)10-3 с., а Т м=(2÷15)10-2 с – постоянная электромеханическая. Т. к. Т я< Т м, то передаточная функция принимает вид
при этом двигатель эквивалентен апериодическому звену. Из двигателей переменного тока наиболее распространены индукционные двигатели (рис. 2.7.6). Эти двигатели имеют две обмотки статора – обмотку возбуждения (ОВ) и обмотку управления (ОУ), они расположены в пространстве под углом 90º.
Рис. 2.7.5 Рис. 2.7.6 ОВ питается от сети ~ I, а ОУ –от усилителя системы, причем U у сдвинуто относительно U в по фазе на 90º. Амплитуда U в= const, а U у= varia и пропорциональна изменениям управляемой величины. Ротор такого двигателя выполняется в виде полого тонкостенного алюминиевого или стального цилиндра или в виде беличьей клетки. При взаимодействии эллиптического поля, создаваемого обмотками статора, с полями вихревых токов, наводимых в роторе, возникает момент, приводящий в движение ротор, который перемещает регулирующий орган. В динамическом отношении асинхронный двухфазный двигатель рассматривается как апериодическое звено, если за выходную величину принята ω вала двигателя, т.е. передаточная функция представима зависимостью
Если же выходной величиной является Θ, то
Постоянные времени двухфазных двигателей представлены в табл. 2.7.1: Таблица 2.7.1
Шаговый электродвигатель (ШД), импульсный, синхронный, в котором импульсы тока подаются в обмотки возбуждения статора, преобразуются в дискретные угловые или линейные перемещения (шаги) ротора. Конструктивно ШД бывают с явно- и неявнополюсным статором, на котором расположены обмотки возбуждения (ОВ), и с ротором без обмотки, выполненным из магнитомягкого материала (реактивный ротор) или из магнитожесткого материала (активный ротор). Импульсы тока от источника энергии через коммутатор подаются на обмотки возбуждения статора, в результате чего ориентация магнитного потока в пространстве между полюсами изменяется дискретно, вызывая смещение ротора на некоторый угол (на некоторое расстояние), называемое шагом. Шаг ШД зависит от числа ОВ, а также от числа выступов на реактивном роторе, от числа активных полюсов при активном роторе. Для ШД с реактивным ротором шаг обычно составляет (1,5÷3,0) угловых градуса, а с активным достигает – 15º. ШД с активным ротором обладают более высоким вращающим моментом и обеспечивают фиксацию положения ротора при обесточенных обмотках. ШД входят в состав шаговых электроприводов, в частности они используются в механизмах станков с числовым программным управлением (ЧПУ). Развитие систем ЧПУ и телеметрических систем создало широкие возможности для применения ШД, преобразующих унитарный код (последовательность импульсов) в пропорциональное перемещение механизма. Системы АУ с ШД можно разделить на две группы: а) системы, в которых ШД выполняют функцию преобразования унитарного кода в фазомодулированный сигнал или другой вид информации. К этим системам относятся устройства, в которых ШД вращает сельсин, поворотный или дифференциальный трансформатор; б) системы, в которых ШД используется для привода исполнительного механизма непосредственно или через усилитель момента. К этим системам относятся приводы подач станков, старт-стопных лентопротяжных механизмов, индексирующие устройства счетчиков, управление затворами и задвижками, синхронизация вращения валов с регулируемым по программе передаточным отношением. В общем случае ШД совместно с управляющим электронным коммутатором можно рассматривать как систему частотного регулирования синхронного двигателя с возможностью фиксации углового положения ротора. Существуют разомкнутые системы ШД (рис. 2.7.7) и следящие (рис. 2.7.8).
Рис. 2.7.7
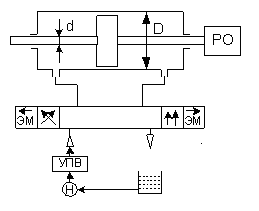
Рис. 2.7.8 Преимущества использования ШД: 1) повышение надежности за счет сокращения аппаратной избыточности; 2) сокращение стоимости по причине п. 1; 3) упрощение САУ за счет сокращения функциональных связей; 4) увеличение точности дискретного перемещения, обусловленное фиксацией ротора ШД при его остановке. Недостатки – незначительные вращающие моменты (0,008÷3,0) кгм. ШД бывают одно-, двух-, трех- и многофазные. Отечественные ШД – ШДЭ-0,1; ШД-4Б; ШД-5 и др. Пневмо- (гидро-) привод (рис. 2.7.9) включает прямоходный или поворотный статический пневмо- (гидро-) цилиндр, шток которого связан с регулирующим органом, распределитель воздуха (гидромассы), устройство подготовки воздуха (гидромассы) и нагнетающий насос, а в гидроприводе и емкость с гидромассой (обычно с маслом). Усилие на штоке
где p – давление. Время срабатывания
где d др – диаметр дросселирующего отверстия, а L – ход поршня. Скорость распространения сжатого воздуха
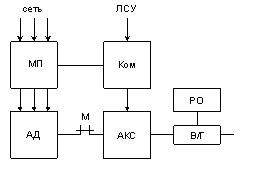
Рис. 2.7.9 Рис. 2.7.10 Электромеханический привод (см. рис. 2.7.10) содержит магнитный пускатель (МП), асинхронный электродвигатель (АД), коммутатор (К), автоматическую коробку скоростей (АКС), соединенную через К с МП, через муфту (М) с АД, а с выходным валом – через кинематическую пару «винт/гайка» (в/г) с РО.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-23; просмотров: 1298; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.219.208.117 (0.119 с.) |







 U вых = 1, если
U вых = 1, если  k i U вхi≥ U пор,и U вых=0, если
k i U вхi≥ U пор,и U вых=0, если 


 ,
,