Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Функции эвм в контуре управления ТП
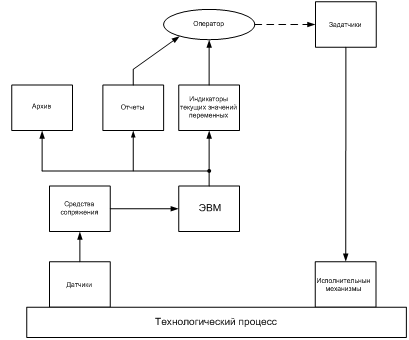
Из всего набора переменных технологического процесса (ТП) контролируемые и управляемые переменные составляют незначительную, но весьма важную для нужд управления часть. Если системы контроля, локальные и централизованные, включают датчики текущих значений параметров (контролируемые и управляемые переменные) и устройства отображения, то автоматизированные системы управления технологическими процессами (АСУ ТП) отличаются от систем централизованного контроля значительно более широким диапазоном автоматизируемых функций управления. Кроме централизованного контроля АСУ ТП выполняют следующие основные функции: 1) определяют оптимальные технологические режимы, удовлетворяющие выбранным критериям; 2) формируют и реализуют управляющие воздействия; 3) корректируют математическую модель объекта управления при изменениях на последнем; 4) рассчитывают и регистрируют текущие и обобщенные технологические и экономические показатели; 5) оперативно распределяют материальные потоки и энергию между технологическими агрегатами и участками; 6) оперативно распределяют вспомогательные механизмы и ремонтные средства; 7) оперативно корректируют суточные и сменные плановые задания по выпуску продукции. Перечисленные функции могут быть реализованы, как правило, при использовании ЭВМ. Поэтому наличие ЭВМ в контуре управления ТП считается одной из составных отличительных черт АСУ ТП. В зависимости от способа включения ЭВМ в контур управления можно выделить пять типов структур АСУ ТП, различающихся характером функций управления. Структура АСУ ТП с ЭВМ в режиме сбора и обработки данных содержит ЭВМ, включенную в контур управления, как показано на рис. 3.5.1. В этой структуре параметры ТП, измеренные датчиками, преобразуются в цифровую форму средствами сопряжения и вводятся в ЭВМ. После обработки в ЭВМ оперативная информация о ходе ТП поступает на средства отображения технологических параметров; статистическая информация, предназначенная для регистрации, а также вычисленные экономические и технологические показатели печатаются в виде отчетов (документа), а данные, которые в дальнейшем могут использоваться в вычислениях, обычно фиксируются на машинных носителях (в памяти машины).
Рис. 3.5.1 Системы сбора и обработки данных (рис. 3.5.2) выполняют в основном те же функции, что и системы централизованного контроля, и являются более высокой ступенью их организации. Поэтому отличия между этими системами носят преимущественно качественный характер. ЭВМ предоставляет широкие возможности для математической обработки данных.
Рис. 3.5.2 В частности, сравнение текущих значений параметров с их максимально и минимально допустимыми значениями, принятое при централизованном контроле, можно дополнить более сложными с математической точки зрения процедурами прогнозирования характера изменения параметров. На основе прогноза оператор имеет возможность так воздействовать на процесс, чтобы не допустить существенного изменения параметров, которое снижает качество выпускаемого продукта. Для выбора рационального технологического режима часто требуются такие показатели, которые не измеряются непосредственно на объекте, а рассчитываются с привлечением справочных данных. К таким показателям относятся себестоимость выпускаемого продукта, обобщенные характеристики качества и др. ЭВМ позволяет рассчитывать эти показатели в реальном времени и представлять их оператору и технологу, что значительно повышает оперативность формирования управляющих команд. Система сбора и обработки информации функционирует следующим образом. Математическое обеспечение ЭВМ состоит из библиотеки рабочих программ, каждая из которых выполняет одну или несколько функций централизованного контроля, и программы-диспетчера. Программа-диспетчер по заранее определенному порядку или в зависимости от текущих значений технологических параметров выбирает для выполнения ту или иную рабочую программу. Порядок выполнения рабочих программ может быть нарушен сигналом прерывания, который воспринимается и обрабатывается специальной подпрограммой программы-диспетчера. Сигнал прерывания может поступать от датчиков, установленных на технологическом оборудовании, если появляется информация, требующая внеочередной обработки и передачи оператору (аварийные остановки оборудования, резкое изменение состояния объекта управления), а также от оператора, которому требуются дополнительные сведения о процессе. Общение между оператором и ЭВМ ведется в режиме «запрос – ответ». Поэтому в составе математического обеспечения имеются программы-трансляторы для перевода с языка, на котором формируется запрос, на машинный язык. Есть также трансляторы для перевода с машинного языка на язык представления информации оператору, который необязательно совпадает с языком запроса.
Наиболее современным средством связи оператора с ЭВМ, а также средством представления информации оператору является дисплей. Через клавиатуру дисплея оператор может передать запрос, а на экране монитора получить ответ в любой удобной для оператора форме. Такими формами могут быть сообщения, сформулированные на естественном человеческом языке, сообщения в табличной форме или в форме графика, мнемосхемы, на которых, например, мигающими символами обозначены места, требующие повышенного внимания, или в цифровом виде указаны значения технологических параметров в определенных узлах схемы. В таких случаях, когда требуется придать большую информативность мнемосхеме, используют дисплеи с цветным изображением. Системы сбора и обработки информации используются при управлении ТП в тех случаях, когда отсутствуют причины, по которым определение технологического режима и формирование управляющих воздействий должны выполнять люди. Наиболее частой причиной является сложность процесса, не позволяющая удовлетворительно описать его математической моделью, формально поставить и решить задачу управления. Структуры АСУ ТП с ЭВМ в режиме советчика (схема на рис. 3.4.2) кроме сбора и обработки информации выполняют следующие функции: - определение рационального технологического режима по отдельным технологическим параметрам или по всему процессу в целом; - определение управляющих воздействий по всем или отдельным управляемым переменным процесса; - определение значений уставок локальных регуляторов. В системах-советчиках данные о технологических режимах и управляющих воздействиях поступают через средства отображения в форме рекомендаций оператору, который может принять или отвергнуть их. Решение оператора основывается на собственном понимании хода ТП и опыте управления им. Существуют разные способы организации функционирования системы-советчика. В одних случаях вычисления управляющих воздействий производятся всякий раз, когда фиксируется отклонение параметров процесса от заданного технологического режима. При этом процесс вычисления инициируется программой-диспетчером, которая содержит подпрограмму анализа состояния ТП. В других случаях вычисления управляющих воздействий инициируются оператором в форме запроса. При этом оператор имеет возможность ввести необходимые для расчета дополнительные данные – информацию, которую невозможно получить путем измерения параметров ТП или содержать в системе как справочную или нормативную, так как она носит качественный характер. Например, в ходе процесса может возникнуть необходимость либо пожертвовать качеством выходного продукта и при этом выполнить задание по количеству, либо уменьшить количество, но при этом сохранить заданное качество. Делая выбор критерия, оператор может руководствоваться огромным числом различных факторов, часть из которых невозможно выразить формально.
В тех случаях, когда дополнительные данные разнообразны, а объем их достаточно велик, общение оператора с ЭВМ строится в форме диалога, который может быть организован, например, следующим образом. В алгоритм вычисления технологического режима или воздействия включаются альтернативные узлы, т. е. точки, после которых процесс вычисления может продолжаться по одному из нескольких различных вариантов. Если логика алгоритма приводит процесс вычисления к альтернативному узлу, расчет прерывается и оператору посылается просьба о сообщении определенной дополнительной информации, на основе которой выбирается один из альтернативных путей продолжения расчета. Системы-советчики применяются в тех случаях, когда требуется осторожный подход к решениям, выработанным формальными методами, что связано с неопределенностью в математическом описании управляемого процесса. Неопределенность выражается в различных формах. Наиболее часты следующие формы неопределенности: - математическая модель недостаточно полно описывает процесс, так как связывает лишь часть управляемых и управляющих переменных процесса; - математическая модель адекватна процессу лишь в узком интервале изменения технологических параметров (например, в случае замены существенно нелинейных функциональных зависимостей их линейными приближениями); - критерии управления носят качественный характер и существенно изменяются в зависимости от большого числа внешних факторов. Неопределенность описания может быть как вынужденной, отражающей плохую изученность сложного процесса, так и преднамеренной, вызванной тем, что реализация полной и адекватной модели требует применения мощной, дорогостоящей ЭВМ, что в конкретном случае не оправдывается экономически. Структура АСУ ТП с ЭВМ в режиме супервизорного управления представляет собой двухуровневую иерархическую систему, представленную схематично на рис. 3.5.3.
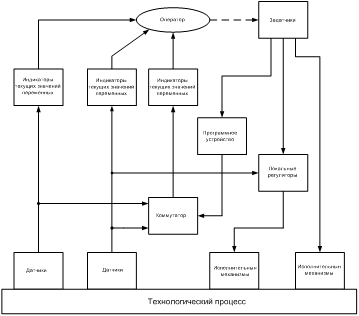
Рис. 3.5.3 Нижний уровень, непосредственно связанный с ТП, образуют локальные регуляторы (Р) отдельных технологических параметров. На верхнем уровне управления установлена ЭВМ, основной функцией которой является определение оптимального технологического режима и вычисление на его основе значений настроек (уставок) локальных регуляторов. Входной информацией для вычисления уставок являются:
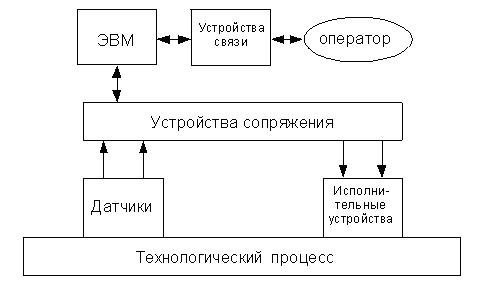
- значения некоторых управляемых переменных (параметров), измеряемые датчиками (управляемых параметров) регуляторов; - контролируемые параметры состояния процесса, измеряемые датчиками (контролируемых параметров) системы. Оператор с пульта управления имеет возможность вводить дополнительную информацию, в частности изменять ограничения на управляемые и управляющие переменные, уточнять критерии управления в зависимости от внешних факторов. При этом возможны два варианта реализации супервизорного управления: с математической моделью и без неё. Если имеется достаточно адекватная модель процесса и критерий управления (целевая функция), то вычисление уставок регуляторов может быть организовано как решение задачи оптимального управления. В тех случаях, когда из-за сложности процесса или из-за экономической нецелесообразности модель процесса не строится, управление можно организовать как процесс экспериментального поиска экстремума целевой функции управления, когда оптимальный технологический режим ищется методом проб. Супервизорный режим позволяет осуществлять автоматическое управление ТП. Роль оператора здесь сводится к наблюдению за процессом и, в случае необходимости, к корректировке цели управления и ограничений на переменные. В структурах АСУ ТП с ЭВМ в режиме непосредственного цифрового управления (рис. 3.5.4), в отличие от супервизорного управления, управляющие воздействия рассчитываются ЭВМ и передаются непосредственно на исполнительные органы. Режим непосредственного цифрового управления позволяет исключить локальные регуляторы с задаваемыми уставками. Как и при супервизорном управлении, функции оператора заключаются в наблюдении за процессом и в его корректировке, в случае необходимости. Если одноуровневая структура АСУ ТП не обеспечивает требуемого режима функционирования сложного технологического объекта, то систему управления можно построить как многоуровневую систему – в виде отдельных подсистем, между которыми установлены отношения соподчинения. Каждая подсистема имеет ЭВМ, работающую в одном из описанных выше режимов. Функции управления могут быть распределены между уровнями, например, следующим образом. Первый (нижний) уровень управления состоит из n подсистем, непосредственно управляющих технологическими операциями, второй – образует m (m << n) подсистем, функциями которых являются расчет и оперативная корректировка режимов ТП. Третий – центральная управляющая подсистема, решающая задачи расчета и оперативной корректировки технологического режима всего процесса в целом.
Рис. 3.5.4 Из рассмотренных структур АСУ ТП три последних типа структур полностью исключают оператора из основного контура управления, поэтому системы, построенные на их основе, можно отнести к классу автоматических.
В настоящее время автоматическое управление удается осуществить на сравнительно простых технологических объектах. Средства АСУ ТП, кроме ЭВМ, включают: - устройства сбора и обработки информации (потенциометры и переключатели, клавиатура, дисплеи, синтезаторы и анализаторы речи, мнемосхемы, коммутаторы); - датчики (положения и перемещения, давления, температуры, расхода газов и жидкостей, параметров полупроводников и среды, электрических параметров, соотношения); - нормирующие преобразователи (измерители и преобразователи); - устройства управления (автоматические регуляторы, жесткие локальные контроллеры, модули технологических систем, контроллеры регулирующие, логические и смешанного типа); - специальные преобразователи (широтно-импульсной модуляции, частотные, ввода-вывода, низко- и высочастотные); - усилители мощности (транзисторные, тиристорные, транзисторные и тиристорные ключи, пневмо-, гидро- и электромашинные усилители - исполнительные механизмы (электроды, источники ионов, испарители, нагреватели, электромагнитные клапаны, гидро- и пневмоприводы, электродвигатели). СБОР И ОБРАБОТКА ИНФОРМАЦИИ
|
|||||||||
|
|
Последнее изменение этой страницы: 2017-01-23; просмотров: 313; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.118.99 (0.03 с.) |