Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Датчики электромашинного типа
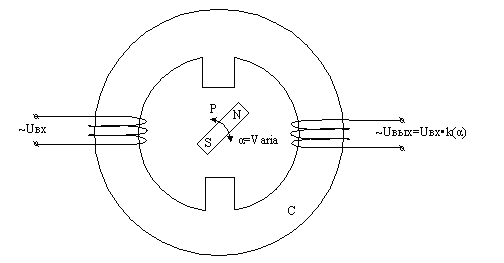
Среди электромеханических систем технологического оборудования значительное место занимают системы дистанционной передачи перемещений (как линейных, так и угловых). К датчикам электромашинного типа относятся: сельсины, магнесины, редуктосины, вращающиеся трансформаторы (в т. ч. синусно-косинусные вращающиеся трансформаторы), индуктосины, цифраторы. Сельсин представляет собой электрическую машину, статор и ротор которой набран из листовой электротехнической стали. На статоре (или роторе) размещают трехфазную (или однофазную обмотку), а на роторе (статоре) – однофазную (или трехфазную) обмотку. Трехфазная обмотка выполняется по схеме треугольника или звезды. Трехфазные обмотки сельсин-датчика и сельсин-приемника соединяются в параллель. В зависимости от соединения однофазных обмоток различают схемы включения «индикаторную» (рис. 2.4.1) и «трансформаторную» (рис. 2.4.2). Рис. 2.4.1 Недостатки сельсинов – питание от источника переменного тока частотой 100÷200 Гц, точность угловых измерений - ±10÷15о, возможно проскальзывание на n ∙120о, М кр ≈n (градусов) в «индикаторной» схеме, наличие искрящего токосъемника (в «индикаторной» схеме). Рис. 2.4.2 Сельсины применяются для грубой работы в системах позиционирования, например, антенн в радиолокации, радионавигации и т. д. Магнесин – бесконтактный датчик угловых перемещений. Применяется для дистанционного контроля угла поворота вала при ничтожно малой нагрузке на валу, например, в магнитных компасах. Статор выполняется из мягкой листовой технической стали, а ротор представляет собой постоянный магнит (жесткая электротехническая, предварительно намагниченная сталь). Ротор механически связан с контролируемым объектом. На статоре размещается две обмотки: обмотка питания и выходная обмотка. Магнесин питается переменным током частотой 400÷500 Гц и строится по схеме, показанной на рис. 2.4.3.
Рис. 2.4.3 В зависимости от материала ротора качество датчика изменяется (табл. 2.4.1). Погрешность магнесина, как элемента следящей системы, примерно 25о. Действие магнесина достигает максимума, если состояние магнита ротора соответствует точке кривой размагничивания, т. е. точке, где максимально значение Bh max, точнее максимальна магнитная энергия единицы объема материала. Максимальный эффект дают ферримагнитные интерметаллические соединения редкоземельных элементов Sm (самарий), Nd (неодим) и Со (кобальт).
Таблица 2.4.1
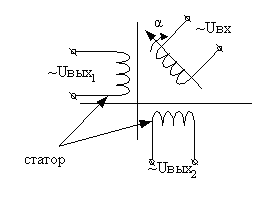
Вращающийся трансформатор (ВТ) имеет (рис. 2.4.4) обмотки в статоре и роторе, набираемых из листовой электротехнической (магнитомягкой) стали, в пазы укладывают по одной или по две обмотки так, чтобы они были взаимно перпендикулярны, а воздушный зазор между статором и ротором сохранялся постоянным.
Рис. 2.4.4 Для ВТ, имеющего по одной обмотке в статоре и роторе, на обмотку ω 1 подается переменное входное напряжение U вх, а во вторичной обмотке ω 2 наводится переменная ЭДС взаимоиндукции, значение которой определяется расположением обмоток ω1 и ω2 друг относительно друга. Если обмотки перпендикулярны, то ЭДС U 2=0, если направление осей магнитного поля обмоток ω 1 и ω 2 совпадает, то U 2= U вх= max,
При наличии нагрузки (при Z н≠∞) в косинусоиде U 2 появляется искажение, которое можно устранить первичным и вторичным симметрированием. Для этого на статоре и роторе укладывают по две взаимно перпендикулярные (в электрическом смысле) обмотки. Но такой трансформатор называют синусно-косинусным ВТ (СК ВТ) (рис. 2.4.5).
Рис. 2.4.5. Вторичное симметрирование достигается равенством параметров ω 2′= ω 2″ и Z н1= Z н2, а первичное симметрирование обеспечивается равенством параметров ω 1′= ω 2″ и введением Z с1. Если в одну из первичных обмоток СК ВТ подать переменное напряжение U 1, то в обмотках ω 2′ и ω 2″ наводятся ЭДС самоиндукции, изменяющиеся при повороте ротора по закону:
Точность измерения угловых перемещений СК ВТ составляет ±(2÷3)′, что достигается прецезионной технологией набора пакетов статора и ротора, а также использованием различных методов компенсации погрешности (например, схема с обратной связью по квадратурной обмотке датчика).
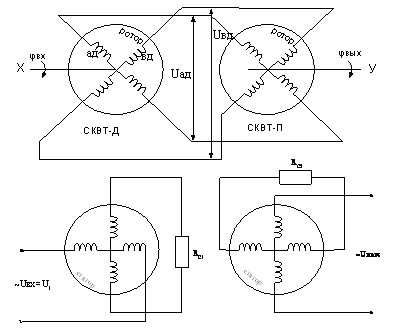
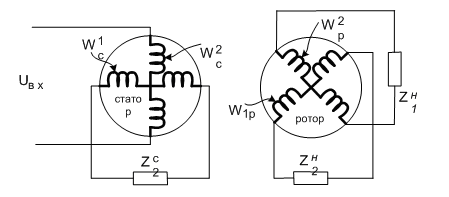
Отечественной промышленностью выпускаются ВТ типов ВТМ, ВТП, МВТ, СКТ, БСКТ, СКВТ и др. Основные характеристики некоторых СК ВТ приведены в табл. 2.4.2. В системах автоматизации ВТ используют не только как датчики, но и как элементы сравнения, измеряющие угол рассогласования. Для этого СК ВТ соединяют по схеме, показанной на рис. 2.4.6. Таблица 2.4.2
Рис. 2.4.6 Выходное напряжение U вых пропорционально сигналу рассогласования ∆φ= φ вх –φ вых. U вых.д. описывается системой:
Выходные напряжения датчика U ад и U вд – входные напряжения приемника. Постоянства k д и k п и их независимость от φ достигают двусторонним симметрированием, тогда U вых представляет собой
а при малых значениях ∆φ:
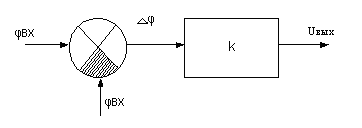
Структурно СК ВТ изображают так, как показано на рис. 2.4.7.
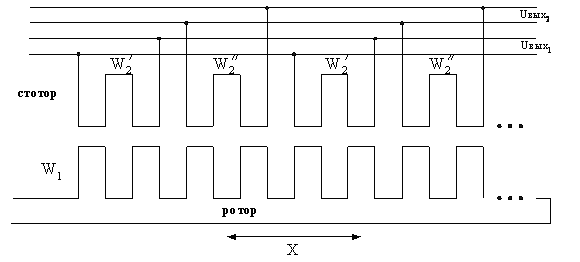
Рис. 2.4.7 Передаточная функция СК ВТ имеет вид W (s)= U вых(s)/ ∆φ (s)= k, где k = k n k д. В динамическом отношении ВТ и СК ВТ – инерционные звенья, но при малых значениях ∆ φ можно считать безынерционными. Индуктосин – датчик угловых (рис. 2.4.8) или линейных (рис. 2.4.9) перемещений, не имеет гальванических контактов, состоит из ротора и статора. На роторе размещают одну обмотку, на статоре – две, со смещением на 90о (электрических) друг относительно друга. В нем магнитопровод не имеет стали и его сопротивление магнитному потоку R м зависит от зазора между ротором и статором. Ротор питается переменным входным напряжением U вх частотой 10 кГц, со вторичных обмоток снимается U вых.
Рис. 2.4.8 Большое число неявно выраженных пар полюсов, точное выполнение рисунка обмоток (при изготовлении способом печатного монтажа или напыления), отсутствие стали и связанных с ней потерь позволяет получить точную синусоидальную зависимость взаимоиндукции между статором и ротором от угла поворота (α) или смещения (Х).
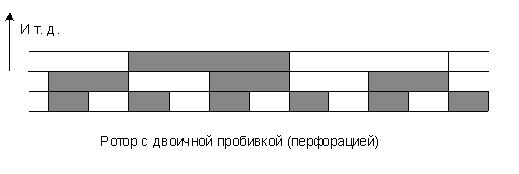
Рис. 2.4.9 Зазор между статором и ротором (примерно 0,1 мм) через износостойкий лак, допускающий скольжение. Погрешность углового индуктосина – несколько угловых минут, погрешность линейного индуктосина – 2÷3 мкм. Цифратор (кодовый датчик) угловых и линейных перемещений – электрическая машина, в которой в статоре размещается щелевой источник света (обычно ИК) и многоячеечный элемент, ротор выполняется перфорированным в двоичном, двоично-десятичном коде так, что дорожки перфорации располагаются против фотоэлементов, а содержимое перфорации (по числу пробивок) отражает двоичную или двоично-десятичную возрастающую на порядок информацию (рис. 2.4.10).
Рис. 2.4.10 Ротор располагают так, что, вращаясь (или перемещаясь), он последовательно затемняет или засвечивает фотоэлементы и по информации с их выходов в двоичном или двоично-десятичном, или в другом коде оценивается результат измерения. При лазерной перфорации ротора точность измерения угла – α ≈0,1 ″, а расстояния – 0,0001 мм. Цифраторы, выпускаемые отечественной промышленностью, представлены в табл. 2.4.3. Таблица 2.4.3
Область применения цифраторов – прецизионное технологическое оборудование (например, обрабатывающие центры), а в электронном приборостроении – коммутация в ИМС на кристалле.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-23; просмотров: 386; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.178.157 (0.018 с.) |

 ,
,
 .
.