Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Пассивные (избыточные) связиСтр 1 из 19Следующая ⇒
Формулы Сомова - Малышева и Чебышева называют структурными формулами, так как связывают число степеней свободы механизма с числом его звеньев и числом и видом кинематических пар. При выводе этих формул предполагалось, что все наложенные связи независимы, т.е. ни одна из них не может быть получена как следствие других. В некоторых механизмах это условие не выполняется, т.е. в общее число наложенных связей может войти некоторое число q избыточных (повторных, пассивных) связей, которые дублируют другие связи, не изменяя подвижности механизма, а только обращая его в статически неопределимую систему. В этом случае при использовании формул Сомова-Малышева и Чебышева эти повторные связи надо вычитать из числа наложенных связей: W = 6n - (5p1 +4p2 + 3p3 + 2p4 + p5 -q) W = 3n - (2p1 + p2 - q), откуда q = W - 6n + 5p1 + 4p2 + 3p3 + 2p4 + p5 или q = W -3n +2p1 + p2 В общем случае в последних уравнениях два неизвестных (W и q) и их нахождение представляет собой трудную задачу. Однако в некоторых случаях W может быть найдено из геометрических соображений, что позволяет определить и q, воспользовавшись последними уравнениями. Наличие избыточных связей требует повышенной точности изготовления элементов кинематических пар во избежание дополнительных нагрузок на звенья механизма, увеличения сил и моментов трения в кинематических парах. Например, при неточности изготовления, оси шарниров кривошипно-ползунного механизма (рис. 1.19,а) могут оказаться непараллельными
q = 1 - 6 × 3 + 5 × 2 + 4 × 1 + 3 × 1 = 0, то есть избыточных связей нет и механизм статически определим. Иногда избыточные связи умышленно вводят в состав механизма, например, для повышения его жесткости, лучшего распределения нагрузок, создания определённости в направлении движения и т.д. Причем, работоспособность таких механизмов обеспечивается при выполнении определенных геометрических соотношений. В качестве примера рассмотрим механизм шарнирного параллелограмма (рис.1.20,а), у которого AB êêCD, BC êêAD; n = 3, p1 = 4, W = 1 и q = 0.

Для повышения жесткости механизма и получения определённости в движении звена 3, когда оно располагается на линии стойки, вводят дополнительное звено EF (рис.1.20,б). Причем при EF êêBC не вносится новых геометрических связей, движение механизма не изменяется и в реальности по-прежнему W = 1, хотя по формуле Чебышева имеем: W = 3 × 4 - 2 × 6 = 0, то есть формально механизм получается статически неопределимым. Однако, если EF не параллельно BC, движение станет невозможным, т.е. W действительно равно 0. Наиболее распространенными являются следующие виды механизмов: а) рычажные (стержневые) механизмы, б) зубчатые, в) фрикционные, г) кулачковые, д) механизмы с гибкой связью, е) механизмы прерывистого движения, Зубчатые и фрикционные механизмы, а также механизмы с гибкой связью, часто называют передачами (зубчатая передача, фрикционная передача, передача с гибкой связью). Рычажные механизмы Механизмы, в состав которых входят только низшие кинематические пары, называются рычажными или стержневыми. Для таких механизмов характерна относительно большая длина звеньев. Названия четырехзвенных рычажных механизмов образуются по названию входного и выходного звена: кривошипно-ползунный механизм (рис. 2.1,а), кривошипно-коромысловый механизм (рис. 2.1,б), кривошипно-кулисный механизм (рис. 2.1,в). Кривошип - звено рычажного механизма, образующее вращательную пару со стойкой и совершающее полный оборот вокруг своей оси (рис. 2.1). Ползун - звено рычажного механизма, образующее поступательную пару со стойкой. Коромысло - звено рычажного механизма, образующее вращательную пару со стойкой и совершающее неполный оборот вокруг своей оси.
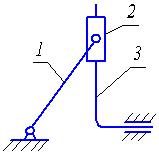
Кулиса - звено рычажного механизма, образующее вращательную пару со стойкой и поступательную пару с другим подвижным звеном. Шатун - звено рычажного механизма, образующее кинематические пары только с подвижными звеньями. К простейшим четырехзвенным рычажным механизмам относятся также синусный механизм (рис.2.2), у которого перемещение ведомого звена 3 пропорционально синусу угла поворота кривошипа 1 (x = r sin a), и тангенсный механизм (рис.2.3), у которого перемещение ведомого ползуна 3 пропорционально тангенсу угла поворота звена 1 (х = h tg a).

Рис. 2.2. Синусный механизм. Рис. 2.3. Тангенсный механизм.
|
||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 431; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.173.112 (0.006 с.) |