Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Практическое занятие №9. Методика анализа и формализованного описания динамики процесса машиностроительного производства.
На современном этапе развития общества и его производительных сил происходит постепенный переход от массового производства и потребления к дальнейшему экономическому росту за счет разработки новых боле эффективных технологий изготовления продукции. Постепенное вытеснение неквалифицированной рабочей силы из товарного производства посредством усовершенствования и автоматизации/роботизации технологических процессов обусловливает главенствующее значение процесса накопления знаний персоналом предприятий, а также генерируемых на его основе новаций как источника материального существования и развития общества. Решающее значение в деле совершенствования деятельности организаций отводится нематериальным факторам, в том числе новым методам и технологиям управления, основанным на системной/групповой динамике и гармонизации функционирования различных элементов сложного процесса производственной деятельности. В этой связи предприятия должны рассматриваться как сложные самоорганизующиеся социотехнические системы, которые должны быть способны изменять свое поведение и организационную структуру в процессе функционирования для достижения заданной цели в постоянно меняющихся условиях экономической среды. Взаимодействие технической и социальной составляющих в таких системах носит сложный неравновесный (квазистационарный) характер, который обусловлен сложностью настройки социальной подсистемы, обладающей большими степенями свободы по сравнению с технической компонентой. Рост степеней свободы усиливает гибкость (эффективность) социотехнической системы, но в тоже время увеличивает неопределенность достижения результата ее функционирования (неустойчивость). Неустойчивость социотехнической системы эффективно преодолевается внутренним процессом самоорганизации в отличие от нормативного подхода, основанного на организации и директивном управлении. В реальных условиях это осуществляется посредством целенаправленного процесса согласования (гармонизации) целей, параметров и ритмов функционирования активных элементов системы между собой и с внешней средой, который в практическом плане реализуется на основе непрерывной циркуляции информационных потоков (управляемого информационного взаимодействия) на всех иерархических уровнях управления производством. Главной отличительной особенностью концепции социотехнических систем будущего, в отличие от существующих организационно-технических систем, является наличие (в дополнение к управленческой функции) и преобладание целенаправленного процесса самоорганизации, характер и скорость которого обусловлены состоянием среды. Данный методологический подход к классификации производственноэкономических систем открывает новые возможности перед организационным проектированием предприятий (организационной системотехникой), поскольку позволяет в будущем перейти от директивного проектирования организаций к самоорганизации производственно-экономических систем посредством управляемого информационного взаимодействия в процессе ауто- и мультидиалога субъектов, решающих задачи управления в группе. Этим достигается синхронизированная выработка управляющих (проектных) решений в режиме реального времени, в основе которой лежит опережающее видение результата (по П.К. Анохину). Различия между социотехническими и организационно-техническими системами будут отчетливо проявляться в условиях перехода от массового товарного производства к постиндустриальной экономике, в которой преобладающую роль играют интеллектуальные способности и знания персонала организаций, принадлежащие ему «на правах собственности», т.е. являющиеся неотделимыми от людей нематериальными факторами (средствами) производства. При этом важность материальных факторов производства в успехе организаций будет неуклонно снижаться, сводя к минимуму значение функции (директивного) управления как таковой. С другой стороны, значение процесса самоорганизации субъектов как носителей интеллектуальных способностей и знаний будет неуклонно возрастать [93].
В случае представления производственного процесса и/или предприятия в виде адаптивной самоорганизующейся (живой) системы задачи организации и управления настолько усложняются, что для их постановки и решения не может быть сразу определен подходящий аппарат анализа/формализации и возникает необходимость в разработке методики содержащей специальные подходы, приемы и методы. Обусловлено это тем, что в адаптивных производственных системах с активными элементами цели, способы и средства их достижения формируются внутри уровней иерархии управления, самостоятельно (автоматически) исходя из состояния факторов внутренней и внешней среды. Это позволяет самоорганизующимся системам быстро адаптировать свою структуру к меняющимся условиям внешнего окружения без прекращения функционирования и потери целостности, формировать возможные варианты поведения и выбирать из них оптимальный, что делает их поведение целенаправленным, но плохо предсказуемым. Этим объясняются известные трудности описания поведения адаптивных систем, которое может быть выполнено с помощью представленных выше ассоциативных математических моделей нелинейной динамики (синергетики) в виде прогноза эволюции их поведения [72, 87]. Такой прогноз представляет собой математический объект, адекватно отражающий множество состояний реальной системы (объекта/процесса), образующих фазовое пространство ее динамики, эволюция которой однозначно определяется начальным состоянием/историей поведения активных элементов системы.
Исследовательская задача состоит в нахождении базовых математических моделей (генетических кодов-программ развития системы), которые исходят из наиболее типичных предположений о свойствах отдельных элементов, составляющих систему, и законах взаимодействия между ними. Как правило, законы, позволяющие связать перманентно формирующуюся цель функционирования сложной адаптивной производственной системы с располагаемыми ею средствами, неизвестны; их невозможно определить на основе статистических исследований или исходя из наиболее часто встречающихся на практике организационно-экономических/функциональных зависимостей, на основе которых можно сформулировать прикладную теорию исследуемого вопроса и применить ситуационный поход к управлению. В этих случаях выдвигается научно-техническая гипотеза, позволяющая разработать концепцию системы, и на ее основе создать в распределенной вычислительной среде ЭВМ многоуровневую/многослойную динамическую имитационную модель, с помощью которой исследуются закономерности функционирования изучаемой системы и возможные варианты решения задач автоматизации управления. При этом могут периодически варьироваться не только элементы системы (из множества располагаемых компонентов), как средства достижения цели, но и критерии, отражающие требования и ограничения, а также сами цели, если их первоначальная формулировка не привела к желаемому результату или принципиально невозможна на начальном этапе исследовательских работ. Такая методика анализа применяется в тех случаях, когда у разработчиков системы на начальном этапе работ нет достаточных сведений о системе или возникшей в ней проблемной ситуации, позволяющих выбрать качественные и количественные методы анализа и формализованного представления системы и процесса ее функционирования, сформировать их адекватные (математические, алгоритмические, аналоговые и др.) модели. Процесс исследования/проектирования системы осуществляется в несколько последовательно осуществляемых этапов: выявление проблем и постановки задач/целей исследования, разработки вариантов и моделей принятия решений, оценка альтернатив и поиск решений, их реализация, оценка эффективности решений и последствий их реализации, проектирование организационных систем для достижения поставленных целей. Более полная реализация данного подхода требует создания средств/систем автоматизации проектирования решений (САПР) в виде специализированных диалоговых процедур, и/или прикладных программ, реализующих разработанные решения/алгоритмы.
Следует иметь в виду важную особенность моделирования адаптивных организационных систем с активными элементами: пытаясь понять принципиальные особенности моделирования таких систем, уже первые исследователи отмечали, что, начиная с некоторого уровня сложности, систему легче изготовить и ввести в действие (например, в виде физической или цифровой аналоговой модели), преобразовать и изменить, чем отобразить формальной математической моделью (Ф.Е. Темников, 1971; В.Н. Волкова, 1999). По мере накопления опыта исследования, разработки или преобразования (реконструкции, реструктуризации) таких систем это наблюдение подтверждалось, и была осознана его основная особенность принципиальная ограниченность формализованного описания развивающихся, самоорганизующихся систем. Учет этой особенности при моделировании систем заключается в необходимости сочетания формальных количественных методов и интеллектуальных методов качественного анализа, которая положена в основу большинства моделей и методик анализа и формализованного представления сложных многофакторных систем. При формировании таких моделей меняется привычное о них представление, характерное для математического моделирования и прикладной математики; изменяется представление и о доказательстве адекватности таких моделей. При возникновении реальных ситуаций, в которых полностью формализованная постановка задачи затруднена, а состав элементов, основные/структурные связи и характер/законы взаимодействия между ними не могут быть количественно измерены, осуществляется постепенная формализация модели, сущность которой заключается в попеременном использовании интуиции и опыта специалистов и методов формализованного представления систем в режиме машинного эксперимента. Данный подход к машинному моделированию сложных многофакторных систем используется в условиях большой начальной неопределенности при исследовании, разработке и функционировании систем управления сложными техническими комплексами и социальноэкономическими объектами. Первоначально он был Волковой В.Н. (1999) на базе концепции структурно-лингвистического моделирования Ф.Е. Темникова, но в последующем стал развиваться как самостоятельное направление [20, 21, 22, 23, 126]. Данные представления начинают использоваться когнитивных моделях зарубежных авторов, в виде понятия «повторного ввода» (англ. reentry), близкое понятию «обратная связь», но подчеркивающее значение самоорганизации нейронных систем живого, частично осознающего себя организма (например, Edelman, 1985).
Постепенная формализации представляет собой своего рода методику системного анализа, которая сочетает неформальные методы, удобные для восприятия информации сознанием человека, и формальные, знаковые представления, позволяющие привлекать достижения математических теорий и применять ЭВМ. Принципиальной особенностью методики постепенной формализации является то, что она ориентирована на развитие представлений исследователя об объекте или процессе принятия решения, на постепенное «выращивание» решения задачи управления. Поэтому предусматривается не одноразовый выбор методов моделирования, а смена методов по мере развития у лиц, принимающих решения (разработчиков системы), представлений об объекте и проблемной ситуации в направлении все большей формализации модели принятия решений. В целом при выборе методов моделирования для постановки и решения принципиально новых задач с большой начальной неопределенностью рекомендуется учитывать разработанную в теории систем и системном анализе классификацию систем по степени организованности и методов их формализованного представления. В частности, если предварительный анализ исследуемого объекта (процесса или проблемной ситуации) показывает, что он может быть представлен в виде хорошо организованной системы, то можно применять методы моделирования из класса аналитических и графических; если системный аналитик приходит к выводу о том, что изучаемый объект относится к плохо организованным (диффузным) системам, то следует обратиться к методам статистического моделирования и специальных методам прикладных областей знания (экономики, социологии и т.д.); в случае представления объекта классом самоорганизующихся систем следует применять методы дискретной математики (в основном графические и теоретико-множественные представления с элементами математической логики), разрабатывая на их основе языки моделирования и средства автоматизации проектирования. Ошибки в выборе методов моделирования на начальных этапах постановки задачи исследования могут существенно повлиять на ход работы или привести в тупик, когда решение вообще не будет получено. Поскольку методы современной математики не может достаточно глубоко знать ни один специалист, в процесс исследования и проектирования объекта необходимо вовлекать, помимо проектировщиков и управленческих работников предприятий, — системных аналитиков (системотехников) и математиков, которые помогут классифицировать изучаемый объект/проблемную ситуацию и пояснить принципиальные теоретические возможности выбираемого для его исследования математического аппарата.
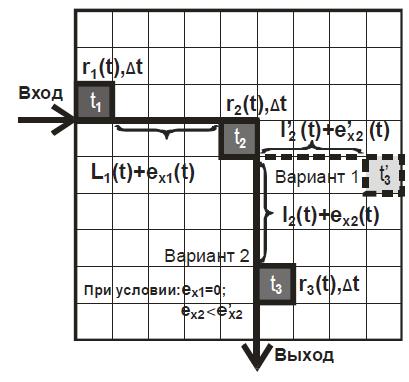
В качестве первого шага процедуры анализа и формализованного представления системы принимается «отграничение» системы от среды путем перечисления ее предполагаемых компонентов (в виде некоторого теоретикомножественного представления) при исследовании пространства состояний системы; исследование их «меры близости» для придания смыслового содержания (семантики) их связям и объединения в группы/подсистемы (подмножества) при отображении структуры и процесса функционирования системы. При этом не ставится задача полного «перечисления» элементов и связей системы; известные на данный момент компоненты и связи между ними фиксируются с помощью выбранного языка (знаковой системы) и методов моделирования. На этом этапе возможности теоретико-множественных исчерпываются, что требует применения функционально-графических (логикосмысловых) способов отображения проектируемой системы, с помощью которых в творческий/когнитивный процесс принятия инженерных решений включаются интуиция и опыт разработчиков. На втором шаге моделирования системы, в поисках приемлемых вариантов решения исследовательской задачи (в нашем случае, при организации управления комплексом автоматических систем машин, — оптимальных маршрутов прохождения предметов труда между условно-автономными обрабатывающими центрами/ячейками, объединенными в однородную технологическую матрицу), выполняется комбинирование элементов системы и их связей, отображаемых в виде элементарных аналитических зависимостей. Путем преобразования полученного отображения, с помощью установленных (принятых) правил структуризации — декомпозиции, композиции, поиска мер близости на пространстве состояний и т.п., — получают/фиксируют новые, не известные ранее компоненты, взаимоотношения, зависимости, которые могут либо послужить основой для принятия решений, либо подсказать последующие шаги по корректировке описания системы. В этом случае графоаналитическая визуализация (развертка) наблюдаемых переменных изучаемого объекта отображает их функционально-структурную/системную взаимосвязь, реализуемую во времени — Fs(t), на основе которой выявляются фундаментальные принципы построения, закономерности поведения/управления и развития исследуемого динамического объекта/процесса. Попеременное использование методов качественного (наглядно-образного, логико-смыслового) и количественного (формального) анализа и отображения исследуемого объекта, позволяет преодолеть недостатки аналитического подхода на основе пространственно-временного сопоставления основных элементов и связей проектируемого объекта в активной машинной среде с последующим вводом шкал измерений для получения формальной динамической имитационной модели проектируемой системы и количественной оценки оптимальности ее функционирования. Имитационные модели применяют в этом случае ввиду сложности объекта моделирования и, соответственно, трудности или невозможности описания его поведения аналитическим способом (математическими уравнениями), так как при описании частей сложного объекта требуется применение различных математических методов с различными нестыкующимися критериями или направлениями оптимизации с точки зрения математической теории. Имитационные модели позволяют использовать многокритериальные (непротиворечивые) подходы в условиях заданного компромисса. Благодаря этим свойствам имитационное моделирование успешно применяется при решении многокритериальных задач управления для проверки различных альтернатив развития проблемной ситуации. Задавая различные альтернативы поведения динамической модели, меняя ее структуру и связи, можно получить область возможных состояний моделируемой системы, характеризующих ее поведение и последствия тех или иных управленческих решений. Применение машинной имитации в качестве основы информационных систем управления (ИСУ) позволяет при определенных условиях создать автоматизированную систему поддержки решений для оперативного управления производством, которая по запросу оператора способна автоматически формировать управленческие решения по ситуациям и отбирать наиболее оптимальные из них [133]. Имитационная модель реализуется в виде специального программного комплекса, имитирующего деятельность реального объекта. Он запускает в ЭВМ параллельно взаимодействующие вычислительные процессы, которые по своим пространственно-временным параметрам являются аналогами реальных процессов, протекающих в моделируемом объекте. Имитация может выполняться и с помощью совокупности обычных расчетных программ, простейшим примером которой является табличный процессор [91]. Процедура машинной формализации итеративно повторяется до тех пор, по не будет найдено удовлетворительное решение, путем оценки правильности отражения в каждой последующей модели компонентов и связей, необходимых для достижения поставленных целей. Машинная среда эксперимента позволяет накапливать информацию об исследуемом объекте и получать отображения последовательных состояний развивающейся динамической системы, постепенно создавая все более адекватную модель реального, изучаемого или создаваемого объекта, процесса или явления. В результате можно получить набор логически связанных алгоритмов, формально отражающих взаимосвязь между компонентами (ресурсами) и целями проектируемой системы, которые можно реализовать в электронной среде/памяти ЭВМ, а затем на их основе простым кибернетическим способом сформировать многоуровневую пространственно-временную динамическую (цифровую аналоговую) модель системы. В этом случае имеет место формальное аналитическое отображение исследуемой/проектируемой системы, но не в виде традиционных (привычных для технической кибернетики) формул и/или уравнений, а в форме многомерной виртуальной цепочки алгоритмов, связанных памятью ЭВМ в единую цифровую аналоговую модель; исследователь получает инструмент, обеспечивающий возможность автоматизации и, соответственно, повторяемость, и наглядность процессов формирования структуры и функционирования системы при перманентном изменении первичных целей, состава и связей компонентов системы в ответ на постоянно меняющиеся условия окружающей среды. Исследовательская задача построения данной системы алгоритмов (например, автоматического определения/выбора системой машин оптимальных маршрутов движения материальных потоков по распределенной технологической матрице) заключается в постепенном ограничении области допустимых решений: в начале требуется исключить все варианты, не удовлетворяющие граничным значениям принятых критериев эффективности/оптимальности, затем необходимо рассмотреть оставшиеся варианты, которые позволяют предметно исследовать область допустимых решений и выбрать из них наиболее предпочтительное (альтернативу). Критериями оценки качества и эффективности организации и управления в этом случае служат гармоничность пространственно-временных отношений элементов системы и синхронность их функционирования, соответственно. На завершающем этапе процедуры формализации решается задача построения информационной среды моделирования исследуемого объекта/процесса, которая в практическом плане реализуется с использованием представленного выше инструментария распределенных вычислений и когнитивной компьютерной графики, адекватно отражающей знания экспертов об исследуемом (проектируемом) объекте в естественной форме, то есть, так как они сформированы в сознании мыслящего субъекта (специалистапредметника) в виде концептуальной семантической схемы-образа. Когнитивная графика формируется в виде произвольного графа или аналоговой функционально-графической пространственно-временной развертки реального объекта или процесса [4, 30, 31, 114], и должна вызывать резонансную активацию когерентных семантических образов-схем (нейронных ансамблей) в памяти операторов человеко-машинной системы (САПР). Необходимость создания такой информационной технологии интеллектуальной поддержки обусловлена, прежде всего, тем, что принятие решений в системах управления предприятиями промышленности часто связано с дефицитом времени: лучше принять не самое хорошее решение, но в требуемый срок, так как в противном случае лучшее решение может уже и не понадобиться. Поэтому решение часто приходится принимать в условиях неполной информации (ее неопределенности или даже дефицита), и нужно обеспечить возможность в максимально сжатые сроки определить наиболее значимые для принятия решений сведения и наиболее объективные предпочтения, лежащие в основе этой операции. Для того чтобы помочь в более сжатые сроки поставить задачу, проанализировать цели, определить возможные средства, отобрать требуемую информацию (характеризующую условия принятия решения и влияющую на выбор критериев и ограничений), а в идеале получить выражение, связывающее цель со средствами, применяют системные представления, машинную имитацию и когнитивное моделирование. В дополнение к этому с помощью этих средств можно обеспечить взаимодействие и взаимопонимание между специалистами различных областей знания, участвующими в постановке и решении задач организации и управления современным высокотехнологичным производством, в котором требуется учитывать все большее число факторов разнообразной природы, являющихся предметом исследования различных областей знаний. В этих условиях один человек не может принять решение о выборе факторов, влияющих на достижение цели, не может определить существенные взаимосвязи между целями и средствами. Поэтому в этом должен участвовать весь коллектив исследователей, а также персонал предприятия, состоящий из специалистов различных областей знаний, между которыми нужно организовать взаимодействие и взаимопонимание, а проблема принятия решений становится проблемой коллективного выбора целей, критериев, средств и вариантов достижения цели, т.е. проблемой коллективного принятия решения (В.Н. Волкова, 2006). Предложенная методика анализа и формализованного описания динамических систем с использованием разработанных методов и инструментов наглядного графоаналитического отображения сложных объектов и процессов позволяет проникать в глубинную сущность сложных экономических явлений, как правило, скрытых и неявно выраженных, и переводить субъективные подсознательные (интуитивные) суждения на строгий формализованный язык объективных методов исследования и количественных измерений [40]. В частности, данная методика и представленный выше аппарат клеточных автоматов могут успешно применяться для имитационного моделирования структурно-компоновочных преобразований, самоорганизации и эффективного функционирования комплекса автоматических систем машин путем генерирования вариантов пространственно-временной организации их активных элементов, и отбора на этой основе оптимальных технических и организационно-технологических решений с учетом принятых ограничений. Постановка математической задачи организации управления комплексом автоматических систем машин в условиях модельного эксперимента на ЭВМ заключается в непрерывном выделении некоторого подмножества на ограниченном множестве элементов комплекса систем машин и их пространственно-временном объединении в производственно-технологический процесс обработки различных изделий с наименьшими затратами времени. Пространственно-временная декомпозиция производственно-технологического процесса обработки изделия с применением комплекса систем машин (Process) — Р(t) описывается на фазовом пространстве его состояний набором элементных процессов/операций обработки изделия — R(t) = {ri(t)}, элементных процессов функционирования автоматических систем машин — А(t) = {аi(t)} и необходимых для их реализации элементных функций — F(t) = {fi(t)}. Точки, отображенные цветными фишками в фазовом пространстве как дискреты времени Δt являются элементарными технологическими операциями обработки изделия — tn, которые в процессе поиска оптимального варианта компоновки систем машин объединяются в элементные технологические процессы посредством вариантного моделирования структурно-функциональных/параметрических связей, количественной оценки их оптимальности и ранжирования по критерию наименьшей длительности технологического процесса — Тц → min (рис.3.5).
Выбор варианта композиции элементных технологических процессов/операций обработки изделия в составе производственнотехнологического процесса осуществляется исходя из следующих условий: 1. Общая ресурсоемкость/продолжительность технологического процесса обработки изделия с применением комплекса систем машин — P(t) или RAF(t)={riаifi(t), Δt}, включающая суммарную длительность множества элементных процессов, связанных с обработкой изделия агрегатами R(t)={ri(t), Δt}, множества элементных процессов транспортировки изделий между агрегатами по выбранным маршрутам транспортирования изделий определенной протяженности (Length of a route) — L(t)={li(t), Δt} и множества межоперационных ожиданий (Interoperational Expectations) — Ex(t) = {exi(t), Δt} должна стремится к минимальному значению, а именно:
2. Ресурсоемкость/длительность элементного процесса обработки изделия агрегатом — R(t), включающая длительность выполнения набора элементарных технологических операций обработки изделия — {ri(t), Δt} с учетом времени установки/снятия изделия (Installation time and product removals — tis/trm) и переналадки/реконфигурации агрегата (tr), — должна стремится к минимальному значению, а именно:
3. Ресурсоемкость/длительность элементного процесса перемещения/транспортировки изделия между агрегатами, обусловленная протяженностью выбранных маршрутов транспортирования изделий — L(t)={li(t), Δt} и включающая длительность выполнения/транспортное плечо набора элементарных операций транспортировки — {li(t), Δt} с учетом времени погрузки/выгрузки изделия на транспортер/робокар (Product loading/unloading tl/tul), — должна стремится к минимальному значению, а именно:
4. Совокупные потери ресурсов и эффективного рабочего времени (снижение производительности) RMS из-за межоперационных ожиданий Ex(t) = {exi(t), Δt} должны стремиться к минимальному значению, а именно:
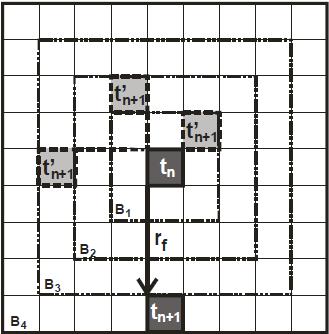
Реализация данной процедуры осуществляется элементным процессом функционирования системы машин/агрегата до окончания выполнения набора элементарных операций обработки изделия посредством режима кругового сканирования модулей/блоков (Block) информационной модели технологической матрицы — Bn и образования обособленного информационного канала межэлементной связи — rf в межмодульном пространстве (информационной модели маршрута движения детали — a movement route), посредством которой задается парное (бинарное) отношение между первоначальным/текущим (tn) и последующим (tn+1) набором операций, который может быть выполнен этим же агрегатом после его перекомпоновки/переналадки или другим агрегатом, компоновка которого соответствует набору операций (tn+1) и не требует изменения (рис. 3.6).
В процессе информационного обмена и обработки параметрических данных каждым элементным процессом функционирования системы машин/агрегатом, а также отображающим его модулем информационной модели технологической матрицы, — соответствующий ему единичный вектор связи — rf принимает ориентированное положение и замыкает бинарное звено многомерной цепочки структурных образований. Завершение шага композиции сопровождается получением, преобразованием и передачей информации об элементных технологических процессах и агрегатах для выполнения последующих шагов композиции. С целью временного упорядочения параллельных и параллельнопоследовательных операций обработки при одновременном изготовлении нескольких изделий (например, А, В, С и т.д.), осуществляется квантование процесса преобразования (декомпозиции и синтеза) совокупности непрерывно изменяющейся во времени и пространстве многомерной цепочке элементных технологических процессов и их последующая синхронизация в дискретной форме. В качестве параметра синхронизации элементных процессов принимается общесистемная дискрета времени — Atn, которая именуется системоквантом или тактом работы комплекса автоматических систем машин, в соответствии с которым совокупный объем работ по обработке изделий/материала расчленяется на множество элементарных операций с одинаковой или кратной длительностью/трудоемкостью (рис. 3.7).
Соблюдая условия пространственно-временного упорядочения множества элементных процессов обработки различных изделий, получаем информационную модель динамики (ИМД) синхронного функционирования агрегатов, адекватно отображающей в наглядной графической форме межэлементные связи, в том числе бинарные отношения между смежными процессами/операциями обработки изделий. Формирование ИМД, непрерывно отражающих последовательность выполнения множества элементных технологических процессов подразумевает многовариантное задание их пространственных сочетаний, и выполнения во времени, с автоматизированным выбором оптимального варианта пространственно-временной организации сложного дискретного процесса многопредметного производства. Композиционное моделирование работы комплекса автоматических систем машин является процессом многошагового формирования ИМД на уровне элементов и межэлементных связей элементных технологических процессов и генерирования на их основе многомерных компоновочных образований ассоциативного/сетевого типа в распределенной информационной среде ЭВМ. Двумерная форма компонования подразумевает использование матричной координатной плоскости с горизонтальным расположением технологических и транспортных путей движения материальных потоков переменной конфигурации. Наивысший уровень развития компьютерно интегрированного производства предполагает многоуровневое расположение систем машин, которое покрывает/заполняет все 3-х мерное производственное пространство и выполнено в виде многоэтажных секций с вертикальными ветвями компонования, обеспечивающих межуровневое перемещение (перераспределение) материальных потоков для оптимизации динамики процесса производства продукции. В процессе создания многомерной распределенной машинной среды композиционного моделирования, элементные процессы обработки изделия и функционирования системы машин/агрегатов должны быть сформированы как условно-автономные самоуправляемые динамические/математические объекты или интеллектуальные информационные агенты с реактивной/проактивной моделью поведения (в терминологии мультиагентных систем) [133], которые представляют собой элементарные локальные динамические звенья распределенной системы управления, самостоятельно определяющие/выбирающие алгоритм управления смежными элементными процессами/агрегатами путем задания бинарных структурных образований, описанных выше (рис.3.8).
В результате объединения/синтеза в процессе композиции двух элементных процессов i-1=1, i=2 путем формирования межэлементных прямых и обратных связей посредством специально разработанной системы информационных коммуникаций образуется подсистема (многополюсник) управления бинарным структурным образованием, функциональная схема которого показана на рис.3.9.
В представленной на рис.3.9 схеме Wi является передаточной функцией или алгоритмом управления i-го элементного процесса — riaifi(t); Wпi(i-1) алгоритм прямой связи или воздействия на i-й элементный процесс; Wоi(i-1) алгоритм обратной связи или воздействия на i-й элементный процесс; xi — входные параметры (входное воздействие) i-го процесса; yi — выходные параметры i-го процесса. Процедура формализованного описания непрерывного процесса синтеза элементных процессов в многомерные ассоциативные бинарные образования требует разработки агентно-ориентированного языка программирования (структурно-логической композиции/СЛК), который должен обеспечить полноту и точность описания многоуровневого состава элементов, межэлементных связей и общих закономерности функционирования системы машин, а также циклов обработки изделий. В конечном итоге, множеству процессов функционирования системы машин и выполнения технологических процессов должно соответствовать множество неориентированных активных информационных модулей матричного пространства моделирования, реализованного в распределенной информационной среде ЭВМ (САПР), на котором непрерывно, в автоматизированном режиме, формируется подмножество ориентированных модулей, генерирующих варианты инженерно-технических решений (Царев А.М., 1997). Качество и эффективность полученных результатов/решений может оцениваться на каждом шаге оптимизационного синтеза, вплоть до уровня бинарных межэлементных отношений, исходя из принципов/критериев целостности и гармонизации процесса функционирования интегрированной производственной системы.
|
|||||||||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 109; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.5.68 (0.027 с.) |