Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принцип работы магнитного компаса.Содержание книги
Поиск на нашем сайте
Компасом называют навигационный прибор, предназначенный для определения курса судна и направлений на различные береговые или плавучие предметы, находящиеся в поле зрения судоводителя. Компас используется также для определения направления ветра и дрейфа судна. По показанию магнитного компаса производится управление судном, с его помощью определяют пеленги на береговые предметы. Обычно магнитный компас устанавливается на высоком открытом месте в диаметральной плоскости судна. В магнитном компасе использовано свойство магнитной стрелки устанавливаться своими концами в направлении действующего на нее магнитного поля. На стрелку судового компаса, кроме магнитного поля земли, действует также магнитное поле, создаваемое на судне железным корпусом и железными предметами оборудования. Под действием этих двух сил магнитная стрелка устанавливается в плоскости компасного меридиана. Магнитный компас подвержен влиянию и других внешних сил, возникающих при качке, поворотах судна, которые выводят стрелку из устойчивого положения. На стрелку компаса влияет также вибрация корпуса от работы двигателя. У морских магнитных компасов роль стрелки выполняет система из четырех, шести и более тонких магнитов, помещенных в котелок с жидкостью, обеспечивающей быстрое гашение колебаний магнитной системы. У компасов, которыми пользуются на суше, в том числе и туристских, шкала с градусным делением нанесена на корпусе компаса. Такой компас, установленный на судне, будет вращаться вместе с судном и шкалой отсчета. - ЗАЧЕМ ВСЕ ЭТО?????????????????????????? Воздушный поплавок поддерживает магнитную систему на плаву, что обеспечивает минимальное трение в точке подвеса. Морской магнитный компас снабжен специальным устройством –девиацион-ным прибором, уменьшающим воздействие на магнитную систему компаса магнитного поля железного корпуса судна. С помощью карданового подвеса обеспечивается горизонтальное положение котелка во время качки, крена и дифферента. НЕТ ОСНОВНОЙ ФОРМУЛЫ
3.2.Способы определения поправки компаса.ИМЕЕТСЯ В ВИДУ ГИРОКОМПАС
Поправкой компаса называется величина параметра (курса или пеленга), компенсирующая систематическую ошибку его измерения. Для определения поправки любого компаса необходимо сравнить истинное и компасное направления на один и тот же ориентир, т.е: ∆МК = ИП – КП. Определение поправки компаса по створу. ИП створа снимают с карты. КП берут в момент пересечения створной линии. Определение поправки компаса по береговым естественным створам (например, срезам двух мысов). В момент пересечения линии естественных створов снимают компасный пеленг и сравнивают его с направлением линии, снятой с карты, проходящей через срезы двух мысов. Определение поправки компаса по пеленгу отдаленного ориентира. Этот способ применяют при стоянке судна на якоре, когда место ориентира и стоянки точно известно. Определение поправки компаса по сличению с другим компасом, поправка которого известна. Способ применяют для определения поправки главного и путевого магнитных компасов путем сличения показаний с гирокомпасом, поправка которого известна. По команде два наблюдателя одновременно замечают курс по обоим компасам. Определяют: ∆МК = (ГКК + ∆ГК) – КК. Определение поправки компаса при определении места судна по трем пеленгам. При определении места судна по трем пеленгам возможно появление так называемого треугольника погрешностей, т. е. проложенные линии положения не пересекаются в одной точке. Когда имеется уверенность в правильном опознании ориентиров и в отсутствии грубых погрешностей в пеленгах, а треугольник получается большим, то это свидетельствует о погрешности в принятой поправки компаса. Чтобы исключить такую погрешность, а заодно и определить действующую поправку компаса, поступают следующим образом: – все пеленги изменяют на 3-5 0 в ту или иную сторону, и после прокладки получают новый треугольник погрешностей; – через сходственные вершины старого и нового треугольников погрешностей проводят линии, а точку М их пересечения принимают за обсервованное место судна, свободное от влияния систематической погрешности в поправке компаса ∆К; – точку М соединяют с ориентирами на карте и измеряют транспортиром полученные истинные пеленги. Сравнив их с компасными пеленгами тех же ориентиров, находят три значения поправки компаса ∆К = ИП – КП. Среднее арифметическое из полученных результатов принимают за действительную поправку на данном курсе. При определении поправки компаса астрономическим способом в качестве компасного направления используется пеленг на светило, измеренный с помощью пеленгатора, а в качестве истинного направления – счислимый азимут данного светила, вычисленный на момент измерения табличным или машинным способом. Необходимо соблюдать следующие условия: 1. Использовать для уточнения ∆К светила, находящиеся на небольшой высоте (h< 30°) и вблизи диаметральной плоскости судна (КУ< 30°); 2. Измерения следует производить сериями из 3-5 пеленгов с перефиксацией пеленгатора; 3. Пеленга измеряют с точностью до 0,1°, моменты замеров фиксируют с точностью не хуже 2-3 с; 4. Счислимый азимут нужно перевести в круговой счет, т.е. ИП = А к. Существует несколько способов определения АК по светилам: 1.Определение ∆К по светилу, находящемуся на произвольном азимуте; 2.Определение ∆К по Солнцу в момент его истинного восхода и захода; 3.Определение ∆К по наблюдениям Полярной звезды. Первый способ – основной и наиболее распространенный, два других являются его частными случаями. Он выполняется в следующей последовательности: Пример: 24 августа 2006года, Средиземное море. В Т с = 20:46′; N=1E; Измерили серию компасных пеленгов: α Скорпиона – КП ср = 219,5°; Т гр.ср. = 19:45′ 07″, ϕ с = 33°19,0′ N; λ c = 21°43,0′ E; КК = 196,0°, определить ∆К. Решение: 1. Вычисляют по МАЕ δ и t м звезды α Скорпиона на Т гр.ср. =19: 45′ 07″ 2. Вычисляют истинный пеленг светила одним из способов:– по таблицам ТВА: - с помощью калькулятора по формулам ПТ: ОБОЗНАЧЕНИЯ СУДОВДЫ НЕ ПОЙМУТ Ctg A = cosϕ · tgδ · cosec tм - sinϕ · ctg tм Сtg A = 0,8356∗ - 0,4975 ∗ 1,4525 – 0,5493 · 1,0547 = -1,1825 А = arcctg – 1,1825 = 40,22°; А к = 220,2° на компьютере с использованием программы "Электронный альманах” А к = 220,2° 3. Рассчитывают поправку компаса: ∆К = ИП – КП = 220,2° - 219,5° = + 0,7°. – обозначения в формулах НЕПОНЯТНЫ Определение ∆К по Солнцу в момент его восхода и захода: Если в момент восхода, либо захода Солнца (в момент касания горизонта его нижним краем) измерить его компасный пеленг, то можно быстро и достаточно точно определить поправку компаса. Специфика данного способа состоит в том, что в момент восхода (захода) Солнца высота его центра равна совершенно конкретной величине (- 24,4′ см. МТ-2000), поэтому искомый Азимут является функцией двух параметров – широты и склонения. Поэтому А с легче вычисляется и проще табули-руется. Для расчета азимута Солнца используется таблица 3.37 МТ-2000. Входными аргументами в табл.3.37 являются счислимая широта - ϕ с, снятая с прокладки на момент замера компасного пеленга, и склонение Солнца - δ о, которое выбирают из МАЕ на гринвичский момент восхода (захода). Табличный азимут дан в полукруговом счете; первая буква наименования при этом одноименна со счислимой широтой, а вторая при восходе Солнца – Е, а при заходе – W. Следует помнить, что полученная таким образом мгновенная поправка компаса, менее точна и надежна, чем полученная основным способом, поэтому её чаще используют только для контроля. Пример:12 апреля 2006г; Черное море. ϕ с = 44°25,0′ N; λ c = 34°12,0′ E; КК = 92,0°; Т с = 06:08′; N=3E; Измерили компасный пеленг Солнца в момент его восхода: КПо = 77,2°; определить ∆К. Решение: 1. Определяют гринвичское время восхода и на полученный момент выбирают из МАЕ склонение Солнца: Т гр = Т с ± N W/E = 06:08′ – 3 = 03: 08′ На Т гр = 03:08′ 12.04.02 из МАЕ - δ о = 08°36,0′ N 2. Входят в табл. 3.37 МТ-2000 с ϕ с = 44°25,0′ N и δ о = 08°36,0′ N и получают на 12 апреля А т = N 77,7° Е, с учетом интерполяции по ϕ и δ о получают А к = ИП = 77,5°. 3. Вычисляют ∆К = ИП – КП = 77,5° - 77,2° = + 0,3°. ТОЖЕ САМОЕ – НЕПОНЯТНО ЧТО К ЧЕМУ
3.3. Практические способы определения девиации магнитного компаса.
Обычно остаточную девиацию определяют после ее уничтожения, но иногда определение девиации может выполняться как самостоятельная работа. Такая необходимость появляется, если обнаружено заметное расхождение наблюдаемой девиации на отдельных курсах с ее табличными значениями, а также при перевозке металлических грузов, после плавания во льдах, при существенном изменении судном широты. Различают полное определение девиации для составления таблицы девиации и частичное, на отдельных курсах, с целью контроля работы магнитного компаса. Для составления таблицы девиацию чаще всего определяют на восьми главных и четвертных компасных курсах, затем по наблюдаемым величинам девиации вычисляют коэффициенты девиации А, В, С, D и Е. Далее по известным коэффициентам рассчитывают таблицу девиации на любое количество курсов, используя формулу (1). В зависимости от величины коэффициентов таблицу девиации вычисляют на 24 или 36 курсов. Если какой-либо коэффициент превышает 3°, таблицу составляют через 10°, а при меньших коэффициентах — через 15°. Аргументом входа в таблицу является компасный курс. Таблица девиации подписывается лицом, производившим ее определение. В таблицу также заносятся рассчитанные значения коэффициентов девиации. Определение девиации выполняют на пале или на малом ходу судна, причем прежде, чем приступить к определению девиации на новом курсе, необходимо выждать 3 — 5 мин, необходимых для перемагничивания судна. На каждом курсе следует по возможности определить девиацию из 3 — 5 наблюдений, а результат осреднить. Точность снятия отсчета пеленга или курса должна быть не ниже 0,2°. Все основные способы определения девиации сводятся к сравнению магнитных направлений (пеленгов, курсов) с направлениями, измеренными по компасу. Для вычисления девиации применяют следующие формулы: δ = МП — КП, δ = ОМП — ОКП, (1) δ = МК — КК Все способы определения девиации различаются только методом получения величины магнитного пеленга или курса. Основные способы определения девиации являются: - Определение девиации по створу или по вееру створов - является наиболее точным способом. Сущность способа заключается в том, что в момент пересечения створа замечают пеленг по компасу. Магнитное направление створа рассчитывают по истинному направлению и величине Веер створов (рис. 24) позволяет определить девиацию несколько раз на одном курсе. Магнитные направления веера створов даются в лоциях или в описаниях девиационных полигонов. Если в районе определения девиации не имеется створов, нанесенных на карту, то можно использовать створ любых предметов (приметных башен, зданий, мачт, мысов и т.п.). Магнитное направление такого створа приближенно рассчитывают как среднее из восьми направлений, измеренных по компасу на главных и четвертных курсах,
- Определение девиации по пеленгу отдаленного предмета производят, когда отсутствуют створы в районе работ. Чаще этот способ выполняют, когда место судна не меняется или меняется незначительно, т.е. при стоянке судна на девиационном пале, бочках и т.п. Величина магнитного пеленга может быть получена с карты, если место судна известно с высокой точностью. Если же такой возможности нет, опять рассчитывают магнитный пеленг как средний из восьми измеренных компасных на главных и четвертных румбах по формуле (2). При развороте судна на новый курс место его на местности не остается постоянным, и при этом изменяется величина МП. Очевидно, что способ можно применять только тогда, когда изменение пеленга Δ от среднего значения не превысит определенной допустимой величины. Из рис. 25 видно, что между расстоянием до ориентира D, радиусом окружности, внутри которой изменяется положение судна (компаса), r и углом Δ существует соотношение:
если задать Δ = 0,2°, то D = 300r. (3) Таким образом, например, при r = 100 м расстояние до ориентира должно быть не менее 16,2 мили.
Способ может применяться и на ходу судна, но при этом пеленг на отдаленный предмет берут в тот момент, когда судно проходит в непосредственной близости от заранее установленного буйка или вешки. Примерная схема маневрирования при определении девиации указанным способом приведена на рис. 26.
Определение девиации по сличению с главным магнитным компасом обычно производят у путевого компаса, так как возможности измерения пеленга с него не имеется. На восемь главных и четвертных курсов ложатся по путевому компасу, а магнитный курс рассчитывают по КК главного компаса. Девиацию путевого компаса δп получают по следующим формулам: МК=ККгл+δгл. δп=МК — ККп (4) или по рабочей формуле, полученной после подстановки первого уравнения во второе, δп=ККгл — ККп+δгл. (5) Сличение показаний компасов, т. е. одновременное фиксирование курса производят 3 — 5 раз и выводят среднее значение. Определение девиации по взаимным пеленгам можно выполнять, когда на видимости не имеется створов и отдаленных предметов, а представляется возможность свезти на берег компас и установить его на треноге. Место установки компаса должно обеспечивать взаимную видимость компаса и судна. При определении девиации по какому-нибудь сигналу (спуск обусловленного сигнального флага, команда по радио и т.п.) измеряют одновременно пеленг с берега и судна. Пеленг с берегового компаса представляет собой МП + 180°, поэтому легко рассчитать и величину девиации. Определение девиации по сличению с гирокомпасом — распространенный способ на судах, имеющих гирокомпас. Сущность способа заключается в том, что магнитный курс получают, определив истинный из показаний гирокомпаса, а склонение выбирают с карты. В процессе определения девиации судно последовательно ложится на восемь главных и четвертных курсов по магнитному компасу. На каждом курсе одновременно замечают (сличают) курсы по гирокомпасу и магнитному компасу. Расчет девиации производят последовательно по следующим формулам: ик=гкк+Δгк, МК = ИК — d, δ=МК — КК или по рабочей формуле, полученной из них, (6) δ = ГКК-КК+(ΔГК — d), где ГКК н ΔГК — курс по гирокомпасу и поправка компаса соответственно. Сличение выполняют 3 — 5 раз, а полученные девиации осредняют. Способ следует выполнять на самом малом ходу, избегая поворотов на большой угол, так как при этом сводятся к минимуму погрешности в поправке гирокомпаса от влияния ускорений. Кроме рассмотренных способов, применяют способ определения девиации по пеленгам небесных светил, если имеется возможность измерить пеленг на светило (Солнце, Луну, звезду) и рассчитать его азимут. Во время плавания необходимо использовать любую возможность для регулярного определения девиации на отдельных курсах с целью контроля достоверности таблицы девиации. Для этого чаще всего используют определения поправки компаса по створам, по пеленгам небесных светил и по сличению с гирокомпасом.
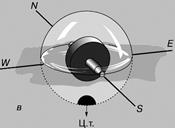
3.4. Принцип работы гирокомпаса, учет погрешностей в его показаниях. Способы определения поправки гирокомпаса. Основными приборами курсоуказания является гирокомпас. Основой всех гироскопических курсоуказателей является гироскоп (быстро вращающееся твердое тело), а работа этих курсоуказа-телей основана на свойстве гироскопа сохранять неизменным направление оси вращения в пространстве без действия моментов внешних сил. Принцип действия гирокомпаса можно описать с помощью упрощенной схемы, приведенной на рисунке 27. Простейший гирокомпас состоит из гироскопа, подвешенного внутри полого шара, который плавает в жидкости; вес шара с гироскопом таков, что его центр тяжести располагается на оси шара в его нижней части, когда ось вращения гироскопа горизонтальна. Предположим, что гирокомпас находится на экваторе, а ось вращения его гироскопа совпадает с направлением запад - восток (позиция a); она сохраняет свою ориентацию в пространстве в отсутствие воздействия внешних сил. Но Земля вращается, совершая один оборот в сутки. Так как наблюдатель, находящийся рядом, вращается вместе с планетой, он видит, как восточный конец (E) оси гироскопа поднимается, а западный (W) опускается; при этом центр тяжести шара смещается к востоку и вверх (позиция б). Однако сила земного притяжения препятствует такому смещению центра тяжести, и в результате ее воздействия ось гироскопа поворачивается так, чтобы совпасть с осью суточного вращения Земли, т. е. с направлением север - юг (это вращательное движение оси гироскопа под действием внешней силы называется прецессией). Когда ось гироскопа совпадет с направлением север - юг (N - S, позиция в), центр тяжести окажется в нижнем положении на вертикали и причина прецессии исчезнет. Поставив метку "Север" (N) на то место шара, в которое упирается соответствующий конец оси гироскопа, и соотнеся ей шкалу с нужными делениями, получают надежный компас. В реальном гирокомпасе предусмотрены компенсация девиации компаса и поправка на широту места. Действие гирокомпаса зависит от вращения Земли и особенностей взаимодействия ротора гироскопа с его подвесом. а) б) в)
Рис.27 Принцип работы гирокомпаса Для сокращения времени прихода в меридиан гирокомпасы имеют устройство для ускорен-ного приведения в меридиан. Если с помощью такого устройства установить и удерживать ЧЭ ГК в меридиане с точностью до 2÷3°, то время прихода в положение равновесия сокращается до 1÷1,5 часов (min 45 мин.) Главная ось ЧЭ работающего ГК на движущемся судне вследствие наличия динамических и статических погрешностей располагается по направлению гироскопического меридиана, не совпадающего с истинным меридианом. Динамические погрешности: скоростная погрешность, которая возникает вследствие угловой скорости вращения плоскости истинного горизонта из-за движения судна по поверхности Земли. Эта погрешность устраняется в ГК с помощью специального счетно-решающего механизма-корректора ГК (вводом в него ИК, V, φ); инерционные погрешности I и II рода, которые возникают при изменении курса и скорости судна. ГК по окончании маневра приходит в новое положение равновесия через 25-30 мин. Эти погрешности устраняются в ГК регулировкой периода незатухающих колебаний ЧЭ ГК (84,3 мин.) и применением масляного успокоителя в ЧЭ; погрешность от качки, которая обусловлена раскачиванием ЧЭ ГК относительно его главной оси. Исключается стабилизацией ЧЭ в плоскости горизонта. Статические погрешности: наличие трения в подвесах гиромоторов; непостоянство скорости вращения роторов гиромоторов; неточная установка основного прибора в ДП судна; действие магнитных полей. Эти погрешности, характеризующие устойчивость работы ГК на неподвижном основании, определяются опытным путем. Если удастся исключить все указанные погрешности, то главная ось ЧЭ ГК устанавливается в направлении истинного меридиана (NИ), а следящая система позволяет непосредственно снимать это направление и передавать на репитеры ГК. Направляющий момент ГК во много раз больше, чем у МК, и не зависит от магнитного поля Земли. Однако с увеличением широты (φ) он уменьшается пропорционально cos φ, и в высоких широтах (> 75°) ГК работает менее надежно.
|
||||||||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 2043; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.11 (0.014 с.) |

 (2)
(2)