
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Описание объекта исследования, приборов и оборудования
Для проведения лабораторной работы используются реальные объекты: детали машин и сборочные единицы (болты, гайки, шпон- ки, узлы).
Методика проведения эксперимента и обработка результатов Студенты, под руководством и при непосредственном участии преподавателя, знакомятся с деталями машин общего назначения согласно классификации, используя при этом натурные образцы, макеты, лабораторные установки и плакаты. Преподаватель выдает студенту какую-либо деталь (узел) для эскизирования, при необхо- димости – мерительный инструмент.
Содержание отчета 1. Титульный лист. 2. Цель работы. 3. Описание, составленное по данному методическому руковод- ству, в котором надо представить названия, характеристики, назна- чение, рисунки деталей. 4. Эскиз детали или сборочной единицы (по усмотрению препо- давателя), выполненный на листе формата А4 (А3) в соответствии с требованиями ЕСКД.
Контрольные вопросы 1. В чем отличие детали от сборочной единицы? 2. Какие типы соединений используют в машиностроении? 3. Какие соединения относят к разъемным (неразъемным)? 4. 5. Каковы достоинства резьбовых соединений? 6. Какие виды шпонок Вы знаете? 7. Каковы достоинства и недостатки шпоночных соединений? 8. Какой профиль могут иметь зубья шлицевого соединения? 9. Почему некоторые виды соединений называют неразъемными? 10. Какими достоинствами обладают заклепочные соединения? 11. Каковы преимущества и недостатки сварных соединений? 12. Каковы основные виды сварных соединений?
Лабораторная работа № 2 ИССЛЕДОВАНИЕ РЫЧАЖНЫХ МЕХАНИЗМОВ Цель работы: изучение принципов действия и видов рычажных механизмов; определение основных параметров рычажных механиз- мов; выполнение кинематической схемы рычажного механизма.
Оборудование и принадлежности 1. Рычажный механизм. 2. Набор ключей. 3. Линейка измерительная. 4. Штангенциркуль.
Теоретические положения Классификация рычажных механизмов. Общие требования Под термином «рычаг» обычно понимают деталь конструкции, которая под действием силы P поворачивается или вращается отно- сительно неподвижной опоры. Возникающий при этом крутящий момент M = Pr, где r – плечо рычага, т. е. расстояние от центра (оси) А вращения до линии действия силы P (рисунок 2.1).
Рычаг, имеющий возможность поворачиваться не менее чем на один полный оборот, называется кривошипом; рычаг с ограниченным углом поворота (менее 360°) обычно называется коромыслом. При помощи рычагов и кривошипов можно передавать вращательное дви- жение с одного вала на другой, а также преобразовывать вращатель- ное движение в прямолинейное и наоборот. Все передачи такого рода можно объединить в группу рычажных передач или, как их часто называют, рычажных механизмов. В отличие от общего машиностроения, где ведущее звено (кри- вошип или кулачок) обычно совершает полное круговое движение, в приборах используются главным образом рычажные механизмы с ограниченным углом поворота ведущего звена, т. е. ведущее звено совершает качательное движение. Классификация рычажных механизмов по виду преобразования представлена на рисунке 2.2. При проектировании рычажных передаточных механизмов необ- ходимо среди многообразия известных схем по возможности выбрать простую, наиболее отвечающую поставленной задаче и провести ее силовой и кинематический расчет. Следует отметить, что в приборах в основном применяются си- нусные, тангенсные, сдвоенные тангенсные и поводковые рычаж- ные механизмы, так как основной задачей этих механизмов являет- ся точность, а не передача крутящего момента.
Синусный и тангенсный механизмы Синусные и тангенсные механизмы применяются довольно широко в рычажных измерительных приборах, где они используются как при- ближенные механизмы для воспроизведения линейных зависимостей. Синусный механизм Синусные механизмы (рисунок 2.3) служат для преобразования поступательного движения во вращательное и состоят из толкателя 2, движущегося поступательно, и рычага 1 со сферическим наконеч- ником, находящегося в колебательном движении. Ведущим звеном может являться как толкатель, так и рычаг.
Определим характеристику и передаточное отношение синусно- го механизма, т. е. зависимость между перемещением толкателя s и углом порота рычага 1 на угол φ:
Как видно из этого уравнения, характеристика синусного меха- низма не зависит от радиуса сферического наконечника рычага.
Величина передаточного отношения остается постоянной. Его мгновенное значение определяется положением звеньев механизма (углом поворота φ). Синусные механизмы применяют в рычажных скобах (рису- нок 2.4, а), сильфонных манометрах (рисунок 2.4, б), центробежных тахометрах (рисунок 2.4, в) и других устройствах.
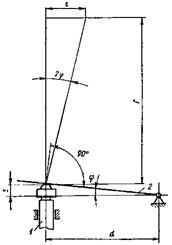
Тангенсные механизмы применяются для тех же целей, что и си- нусные. В отличие от последних, в которых точка контакта при работе механизма перемещается по плоской поверхности толкателя, в тан- генсных механизмах она скользит по рабочей поверхности рычага. На рисунке 2.5 показана схема тангенсного механизма, характе- ристика которого определяется следующей зависимостью:
Передаточное отношение тангенсного механизма для случая, ко- гда ведущим является толкатель:
Примером использования тангенсного механизма является кон- струкция оптиметра (рисунок 2.6).
а б Рисунок 2.6 – Оптиметр: а – общий вид; б – принцип действия
Двойной тангенсный механизм На рисунке 2.7 показана схема рычажного механизма, представ- ляющего собой комбинацию двух тангенсных механизмов. Он со- стоит из рычага 2, передающего движение от ведущего толкателя 1 к ведомому толкателю 3.
В реальной конструкции рычажного механизма стержни, сопри- касающиеся с рычагом, обычно имеют сферический наконечник. При повороте рычага на угол φ точка касания смещается. В резуль- тате передаточное отношение изменяется. Пусть вначале рычаг находится в горизонтальном положении и его передаточное отно- шение i 0 = l 2 / l 1. При повороте рычага на угол φ точки касания стержней и рычага сместятся, в результате чего возникнет погреш- ность перемещения. В рассматриваемом случае уменьшение ошибки передаточного отношения достигается уменьшением радиусов R 1 и R 2, поэтому применяют ножевые опоры, которые имеют малый ра- диус закругления порядка 0,5–5 мкм. Еще одним способом компенсации конструктивной погрешности передаточного отношения является использование сферических нако- нечников, радиусы которых пропорциональны длинам плеч рычагов.
Простейшим примером двойного механизма являются рычажные весы (рисунок 2.8).
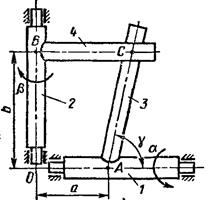
Поводковые механизмы Поводковые механизмы относятся к пространственным механиз- мам. Их применяют в различных измерительных приборах для пре- образования вращательного движения ведущего звена во вращатель- ное движение ведомого звена. Последнее находится под определен- ным углом к ведущему звену. В поводковом механизме (рисунок 2.9) движение с ведущего ва- ла 1 передается на ведомый вал 2 с помощью поводков 3 и 4, пред- ставляющих собой стержни любого диаметра, оси которых либо перпендикулярны к осям валов 1 и 2, либо одна из осей (чаще ось ведущего поводка) наклонена под углом γ ≠ 90°. Точки пересечения А и В осей поводков с осями соответствующих валов находятся на расстояниях a и b от точки пересечения валов O. При повороте ве- дущего вал 1 на угол α ведомый вал 2 поворачивается на угол β, в общем случае равный углу α.
Характеристика поводкового механизма имеет вид
b= arctg b ×tga. a + b ctgg cosa
(2.6)
Тогда передаточное отношение всего механизма определяется по формуле a +cosa×ctgg
æ 2 ö
(2.7)
 ç b 2 ÷ b ç b 2 ÷ b
è ø Передаточное отношение не является величиной постоянной и зависит от ряда параметров механизма. К их числу относятся: угол поворота ведущего поводка α, отношение длин поводков, угол наклона ведущего поводка γ. Поводковые механизмы благодаря простоте изготовления при- меняют в приборах, заменяя зубчатые механизмы с коническими колесами при ограниченных углах поворота. Несмотря на наличие трения скольжения в точке контакта поводков, КПД этих механиз- мов достаточно высок и составляет 92–96 %. Лабораторная установка
Наконечник индикатора 5 является сменным (плоский и сфери- ческий). При использовании плоского наконечника его необходимо устанавливать таким образом, чтобы он входил в контакт с цилин- дрической поверхностью подшипника. Сферический наконечник дол-жен опираться на плоскую поверхность рычага (площадка 7) как можно ближе к оси подшипника.
Порядок выполнения работы 1. Получить у преподавателя или инженера принадлежности к ра- боте и установку. 2. Ознакомиться с принципом работы лабораторной установки. 3. Начертить схему установки. 4. Измерить расстояния между осями подшипников и центром опоры. 5. Установить в индикатор плоский наконечник. Опереть нако- нечник индикатора на подшипник II. 6. Установить барабан микрометра в нулевое положение. 7. Установить ноль на шкале индикатора. 8. Сделать один оборот барабана микрометра. 9.
10. 11. Переместить наконечник на вал III. 12. Повторить пункты 6–9. 13. Заменить наконечник на сферический. Установить индикатор на плоскую площадку. 14. Повторить пункты 6–12. 15. Заполнить таблицу. 16. Построить график зависимости показаний индикатора от пе- ремещений микрометра. 17. Получить у преподавателя устройство с поводковым меха- низмом. 18. Начертить валы с поводковым механизмом, указав при этом способы крепления поводков. 19. Оформить отчет о лабораторной работе.
Содержание отчета 1. Титульный лист. 2. Цели и задачи выполнения работы. 3. Оборудование и принадлежности к работе. 4. Схема установки (плоская). 5. Результаты измерений (таблица 2.1). 6. График по результатам измерений. 7. Чертежи валов с поводковыми механизмами. 8. Выводы. Контрольные вопросы 1. Назначение рычажных механизмов. 2. Определения понятий «рычаг», «коромысло», «кривошип». 3. Классификация рычажных механизмов. 4. Требования к рычажным механизмам в приборах. 5. Передаточная функция синусного механизма. 6. Примеры применения синусного механизма. 7. Передаточная функция тангенсного механизма. 8. Примеры применения тангенсного механизма. 9. Передаточная функция двойного тангенсного механизма. 10. Примеры применения двойного тангенсного механизма. 11. Поясните результаты измерений.
1. Элементы приборных устройств: учебное пособие для студен- тов вузов: в 2 ч. / О. Ф. Тищенко [и др.]; под ред. О. Ф. Тищенко. – М.: Высшая школа, 1982. – Ч. 1: Детали, соединения и передачи. – 304 с. 2. Милосердин, Ю. В. Расчет и конструирование механизмов при- боров и установок: учебное пособие для приборостроительных ин- женерно-физических специальностей вузов / Ю. В. Милосердин, Ю. Г. Лакин. – М.: Машиностроение, 1978. – 320 с.
Лабораторная работа № 3
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-07-14; просмотров: 178; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.59.231.155 (0.08 с.) |








 Рисунок 2.2 – Классификация рычажных механизмов
Рисунок 2.2 – Классификация рычажных механизмов Передаточное отношение для случая, когда ведущим является толкатель, найдем из следующего уравнения:
Передаточное отношение для случая, когда ведущим является толкатель, найдем из следующего уравнения:




 где R – радиус наконечника толкателя.
где R – радиус наконечника толкателя.

 Погрешность передаточного отношения для механизмов этого типа не зависит от температурных изменений, так как при измене- нии плеч рычагов их отношение остается постоянным и будет опре- деляться изгибом рычагов и ошибками изготовления плеч l 1 и l 2.
Погрешность передаточного отношения для механизмов этого типа не зависит от температурных изменений, так как при измене- нии плеч рычагов их отношение остается постоянным и будет опре- деляться изгибом рычагов и ошибками изготовления плеч l 1 и l 2.
 cos2 aç -1÷ + 2 cosactgg + ctg2g +1
cos2 aç -1÷ + 2 cosactgg + ctg2g +1 Для проведения лабораторной работы используется лаборатор- ная установка, схема которой представлена на рисунке 2.10.
Для проведения лабораторной работы используется лаборатор- ная установка, схема которой представлена на рисунке 2.10.


