
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вывод: уравновешивающая сила определена верно.
Пример 2. Кинематический и силовой анализ кривошипно-ползунного механизма Для кривошипно-ползунного механизма, положение звеньев которого задано углом поворота кривошипа φ 1 = 240° (рис.2.21), выполнить структурное, кинематическое и силовое исследование.
Рис.2.21.Структурная схема кривошипно-ползунного механизма Дано: частота вращения кривошипа n 1 = 290 об/мин; линейные размеры звеньев: lAB = 0,36 м, lB С = 1,5 м, Кинематическое исследование выполнить графоаналитическим методом. Силовой анализ начального механизма выполнить двумя способами: 1.С помощью плана сил. 2.С помощью теоремы о «жёстком» рычаге Н.Е. Жуковского. Решение: Структурный анализ механизма Заданный механизм состоит из неподвижного звена – стойки и трёх подвижных звеньев – кривошипа АВ, шатуна ВС, ползуна D. Стойка представлена шарнирно-неподвижной опорой А и направляющей ползуна. На структурной схеме механизма (см. рис.2.21) элементы стойки обозначе-ны цифрой 0, а подвижные звенья – цифрами 1, 2, 3 соответственно. Кривошип 1 (АВ) со стойкой 0 образуют вращательную кинематичес-кую пару А. Шатун 2 (ВС) образует вращательную кинематическую пару В с кривошипом 1. Ползун 3 образует вращательную кинематическую пару С с шатуном 2 и поступательную кинематическую пару D со стойкой 0. Результаты структурного анализа кривошипно-ползунного механиз-ма оформим в виде схемы (рис.2.22) и таблицы кинематических пар (табл.2.3):
а б
Рис. 2.22. Структурные группы механизма: а – кривошипно-ползунная; б – начальный механизм
Таблица 2.3. Кинематические пары механизма
Число степеней свободы механизма определим с помощью формулы Чебышева: W = 3· n – 2· Р5 – Р4 Согласно структурной схеме число подвижных звеньев n = 3. Согласно таблице структурного анализа число кинематических пар 5-го класса Р5 = 4, кинематические пары 4-го класса отсутствуют.
Тогда число степеней свободы: W = 3·3 – 2·4 – 0 = 1. Число 1 указывает, что данный механизм имеет одно ведущее звено, входящее в начальный механизм. Начальный механизм образован кривошипом 1 и стойкой 0 (см. рис. 2.22 б). В структуру заданного механизма также входит кривошипно-ползунная структурная группа, состоящая из шатуна 2 и ползуна 3 (см. рис. 2.22 а). Кинематический анализ механизма 1. Построение плана положений звеньев механизма (плана механизма) Перед построением плана механизма (рис.2.23) выполним необходимые расчёты. Пусть кривошип 1 на плане механизма будет представлен отрезком АВ = 36 мм. Тогда масштабный коэффициент плана механизма: μl = lAB / AB = 0,36/ 36 = 0,01 м/мм Используя полученный масштабный коэффициент, переводим остальные линейные размеры механизма в отрезки: ВС = lB С / μl = 1,5 / 0,01 = 150 мм; В S 2 = BE = lBE / μl = 0,36 / 0,01 = 36 мм; EF = lEF / μl = 0,34 / 0,01 = 34 мм; H = h / μl = 0,34 / 0,01 = 34 мм. План механизма (рис.2.23) строим в следующем порядке: 1).Изображаем точку А и прорисовываем шарнирно-неподвижную опору А.
Рис. 2.23. План механизма (μl = 0,01 м/мм)
2).Через точку А проводим горизонтальную ось Х и вертикальную ось Y. 3).Строим отрезок АВ, составляющий угол 240° с осью Х, отсчитанный против часовой стрелки. 4).На оси Y вниз от точки А откладываем расстояние АА′ = H и через точку А′ проводим горизонтальную прямую yD. 5).Строим дугу окружности радиусом R 1 = BC с центром в точке B, её пересечение с прямой yD даёт точки C, D (точка D – проекция точки C на стойку). 6).На отрезке ВС откладываем расстояние В S 2 и обозначаем центр масс шатуна 2 – точку S 2. 7).Строим отрезок BE как продолжение отрезка ВС и обозначаем точку E. 8).Строим отрезок EF, перпендикулярный отрезку В E. 2. Построение плана скоростей точек механизма План скоростей желательно строить рядом с планом механизма. Перед построением плана скоростей точек механизма (рис.2.24) выполним необходимые расчёты. Точка В совершает вращательное движение относительно точки А, следовательно, её полная скорость определяется с помощью векторного выражения:
где Точка А принадлежит опоре и является неподвижной, то есть Угловая скорость кривошипа 1: ω 1 = π · n 1 /30 = 3,14·290 / 30 = 30,35 с-1, тогда Таким образом, вектор скорости Примем масштабный коэффициент плана скоростей тогда длина отрезка, изображающего на плане вектор скорости Точка С на плане положений механизма одновременно принадле-жит шатуну 2 и ползуну 3. Значит, её полная скорость
где Точка D принадлежит горизонтальной опоре и является неподвиж-ной, то есть
Вектор скорости Величины и направления векторов скоростей 1).Обозначаем полюс плана скоростей 2).Через полюс 3).Через
Рис. 2.24. План скоростей механизма В результате выполненных построений получился треугольник Δ Длины и направления векторов скоростей точек S 2, E, F определим с помощью теоремы подобия. Используя эту теорему, определим положения точек s 2 , Для определения положения точки s 2 на плане скоростей составим пропорцию:
отсюда Полученный отрезок Полюс Рассуждая аналогично, определим скорость точки E.
отсюда Полученный отрезок Полюс
Положение точки f на плане скоростей и длину вектора скорости 1).Соединив на плане механизма соответствующие точки, получаем отрезок CF (см. рис.2.23). 2).На плане скоростей через точку 3).Полюс Отметим, что треугольник Δ Полученные при построении плана скоростей векторы Вычисляем неизвестные линейные скорости и угловую скорость шатуна 2:
3. Построение плана ускорений точек механизма План ускорений желательно строить рядом с планом механизма. Перед построением плана ускорений точек механизма (рис.2.25) выполним необходимые расчёты. Точка В совершает вращательное движение относительно точки А, следовательно, её полное ускорение определяется с помощью векторного выражения:
При вращательном движении полное ускорение точки определяется как векторная сумма нормального и тангенциального ускорений. Значит, ускорение
где
Точка А принадлежит опоре и является неподвижной, то есть её полное ускорение Кривошип 1 вращается относительно точки А с постоянной угловой скоростью При этом величина полного ускорения точки В:
Таким образом, вектор полного ускорения Точка С на плане механизма (см. рис.2.23) одновременно принад-лежит шатуну 2 и ползуну 3. Значит, её полное ускорение может быть определено с помощью векторных выражений:
где
Точка С совершает вращательное движение относительно точки В, следовательно, полное ускорение
где Точка D принадлежит горизонтальной опоре и является неподвиж- ной, то есть относительно точки D. Следовательно, векторное выражение для определения полного ускорения точки С будет выглядеть так:
Значение ускорения
Примем масштабный коэффициент плана ускорений
Вектор нормальной составляющей ускорения Величины и направления векторов ускорений 1).Обозначаем полюс плана ускорений 2).Через полюс 3).Через точку 4).Через точку 5).Соединив на плане ускорений соответствующие точки, получим отрезок Длины и направления векторов ускорений точек S 2, E, F определим с помощью теоремы подобия. Используя эту теорему, определим положения точек Для определения положения точки s 2 на плане ускорений составим пропорцию:
отсюда Полученное значение Полюс плана ускорений
Рис. 2.25. План ускорений механизма Рассуждая аналогично, определим ускорение точки E:
отсюда рис.2.23), тогда Полученное значение Полюс Положение точки f на плане ускорений (см. рис.2.25) и значение ускорения 1).Соединив на плане механизма соответствующие точки, получаем отрезок CF. 2).На плане ускорений через точку 3).Полюс Отметим, что треугольник Δ Полученные при построении плана ускорений векторы Определяем неизвестные линейные ускорения и угловое ускорение шатуна 2:
ε 2 = Направление вектора углового ускорения Точку B делаем условно неподвижной, а к точке C прикладываем вектор тангенциальной составляющей ускорения Силовой анализ механизма 1. Определение действующих на механизм силовых факторов К действующим на механизм силовым факторам относятся силы веса G 2 = 95 Н, G 3 = 50 Н и сила полезных сопротивлений Кроме того на механизм действуют «даламберовы» силы инерции и моменты от сил инерции. Определим их численные значения и направления. Кривошип 1 совершает вращательное движение с постоянной угловой скоростью
Шатун 2 совершает плоское движение, следовательно:
Ползун 3 совершает поступательное движение, следовательно:
Массы звеньев m 2, m 3 определяются как соотношение сил веса m 2 = тогда силы инерции звеньев Момент инерции шатуна 2 выразим через его массу и линейные размеры IS 2 = тогда момент от сил инерции Вектор силы инерции 2. Силовой анализ структурной группы 2–3 Кривошипно-ползунную группу 2–3 выделяем из механизма. Действие шатуна 2 на кривошип 1 в кинематической паре В заменя-ем силой реакции На данном этапе исследования направление и численное значение силы реакции
Направление и численное значение силы реакции Значит, условие равновесия структурной группы 2–3 будет определяться векторным уравнением:
Линия действия нормальной составляющей силы реакции Вычерчиваем план положений структурной группы 2–3 (рис.2.26) с использованием масштабного коэффициента μl = 0,01 м/мм, на котором круговыми стрелочками обозначим направления углового ускорения Тангенциальную составляющую силы реакции Для этого отдельно от структурной группы 2-3 вычертим план положений шатуна 2 (рис.2.27) с использованием масштабного коэффици-ента μl = 0,01 м/мм, на который нанесём векторы сил
Рис. 2.26. План структурной группы 2–3 (μl = 0,01 м/мм) Тангенциальную составляющую силы реакции
Рис. 2.27. План положений шатуна 2 (μl = 0,01 м/мм) Силу инерции 1).Момент от силы инерции 2).Силу инерции
|
||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 74; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.189.170.206 (0.146 с.) |

 = 0,85 м, lBE = 0,36 м,
= 0,85 м, lBE = 0,36 м,  l Е F = 0,34 м, h = 0,34 м; силы веса звеньев: G 2 = 95 Н, G 3 = 60 Н; сила полезного сопротив-ления
l Е F = 0,34 м, h = 0,34 м; силы веса звеньев: G 2 = 95 Н, G 3 = 60 Н; сила полезного сопротив-ления  = 160 Н, приложенная в точке С ползуна 3, противоположно
= 160 Н, приложенная в точке С ползуна 3, противоположно  .
. 


 ,
, – полная скорость точки А;
– полная скорость точки А;  – скорость вращательного движения точки В относительно точки А.
– скорость вращательного движения точки В относительно точки А. =
=  = ω 1 · lAB.
= ω 1 · lAB. будет перпендикулярен отрезку АВ и сонаправлен с вектором угловой скорости
будет перпендикулярен отрезку АВ и сонаправлен с вектором угловой скорости  .
. = 0,1
= 0,1  ,
, =
= 
 ,
,  – соответственно скорости вращательного движения точки С относительно точек В и D;
– соответственно скорости вращательного движения точки С относительно точек В и D;  – полная скорость точки D.
– полная скорость точки D. = 0, значит:
= 0, значит:  .
. направлен перпендикулярно отрезку BC плана механизма. Вектор скорости
направлен перпендикулярно отрезку BC плана механизма. Вектор скорости  , в нём располагаются скорости неподвижных точек механизма
, в нём располагаются скорости неподвижных точек механизма  – прямую перпендикулярную отрезку ВС плана механизма (см.рис.2.23), пересечение этих прямых даёт нам точку с и отрезки
– прямую перпендикулярную отрезку ВС плана механизма (см.рис.2.23), пересечение этих прямых даёт нам точку с и отрезки  и
и  , которые являются векторами скоростей
, которые являются векторами скоростей 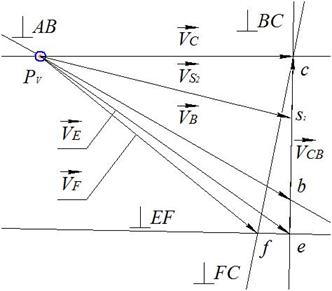

 , в котором отрезки
, в котором отрезки  соответственно. Векторы скоростей
соответственно. Векторы скоростей  ,
,  направлены к точке с плана скоростей, в соответствие с правилами суммы векторов.
направлены к точке с плана скоростей, в соответствие с правилами суммы векторов. , f на плане скоростей. Затем соединив эти точки с полюсом
, f на плане скоростей. Затем соединив эти точки с полюсом  ,
,  ,
,  .
.  =
=  или
или  =
=  ,
, =
=  , где ВС = 150 мм, В S 2 = 85 мм плана механизма (см. рис.2.23), тогда
, где ВС = 150 мм, В S 2 = 85 мм плана механизма (см. рис.2.23), тогда  ≈ 31 мм.
≈ 31 мм. =97 мм, который на плане скоростей изображает вектор скорости
=97 мм, который на плане скоростей изображает вектор скорости  =
=  =
=  ,
, =
=  , где ВС = 150 мм, BE = 36 мм плана механизма (см. рис.2.23), тогда
, где ВС = 150 мм, BE = 36 мм плана механизма (см. рис.2.23), тогда  =
=  = 13 мм.
= 13 мм. = 116 мм, который на плане скоростей изображает вектор скорости
= 116 мм, который на плане скоростей изображает вектор скорости  – прямую, перпендикулярную отрезку CF, пересечение этих прямых даёт точку f (см.рис.2.24).
– прямую, перпендикулярную отрезку CF, пересечение этих прямых даёт точку f (см.рис.2.24). , в результате получаем отрезок
, в результате получаем отрезок  = 106 мм, который на плане скоростей изображает вектор скорости
= 106 мм, который на плане скоростей изображает вектор скорости  .
. , полученный на плане скоростей, подобен треугольникуΔ FEC на плане механизма.
, полученный на плане скоростей, подобен треугольникуΔ FEC на плане механизма. ,
,  ),
),  ,
,  (
( направлены от полюса
направлены от полюса  =
=  = 0,1·54 = 5,4 м/с;
= 0,1·54 = 5,4 м/с;  =
=  = 0,1·96 = 9,6 м/с;
= 0,1·96 = 9,6 м/с; =
=  = 0,1·97 = 9,7 м/с;
= 0,1·97 = 9,7 м/с;  =
=  = 0,1·116 = 11,6 м/с;
= 0,1·116 = 11,6 м/с; =
=  = 0,1·106 = 11,6 м/с; ω 2 =
= 0,1·106 = 11,6 м/с; ω 2 =  .
.  можно определить с помощью векторного выражения:
можно определить с помощью векторного выражения: ,
, ,
,  – соответственно нормальное и тангенциальное ускорение вращательного движения точки В относительно точки А. Тогда можно записать:
– соответственно нормальное и тангенциальное ускорение вращательного движения точки В относительно точки А. Тогда можно записать:
 = 0.
= 0. = 0, т.е.
= 0, т.е.  = ε 1 · lAB = 0.
= ε 1 · lAB = 0. =
=  =
=  · lAB =30,352·0,36 = 332 м/с2.
· lAB =30,352·0,36 = 332 м/с2. будет параллелен отрезку АВ и направлен к точке А, центру вращения кривошипа 1.
будет параллелен отрезку АВ и направлен к точке А, центру вращения кривошипа 1.
 – соответственно ускорения относительного движения точки С относительно точек В и D;
– соответственно ускорения относительного движения точки С относительно точек В и D; 
 ,
, ,
,  – соответственно нормальная и тангенциальная составляю-щая ускорения вращательного движения точки C относительно точки B.
– соответственно нормальная и тангенциальная составляю-щая ускорения вращательного движения точки C относительно точки B. .
. вычислим с помощью выражения:
вычислим с помощью выражения: · lBC = 3,62·1,5 = 19,4 м/с2.
· lBC = 3,62·1,5 = 19,4 м/с2. = 2
= 2  . Тогда длины отрезков, изображающих на плане векторы ускорений
. Тогда длины отрезков, изображающих на плане векторы ускорений 
 , будут равны:
, будут равны: =
=  =
=  /
/  будет параллелен траектории движения точки С.
будет параллелен траектории движения точки С.
 , это начало построения, в нём располагаются ускорения неподвижных точек механизма
, это начало построения, в нём располагаются ускорения неподвижных точек механизма  = 10 мм, который изображает на плане вектор нормальной составляющей ускорения
= 10 мм, который изображает на плане вектор нормальной составляющей ускорения  проводим прямую, перпендикулярную отрезку BC (см. рис.2.23), а через полюс
проводим прямую, перпендикулярную отрезку BC (см. рис.2.23), а через полюс  = 144 мм и
= 144 мм и  = 70 мм, которые на плане являются векторами ускорений
= 70 мм, которые на плане являются векторами ускорений  ,
,  ,
,  ,
,  .
.  =
=  =
=  ,
, =
=  =
=  ≈ 82 мм.
≈ 82 мм. =105 мм, который на плане изображает вектор полного ускорения
=105 мм, который на плане изображает вектор полного ускорения 

 , где ВС = 150 мм, BE = 36 мм плана механизма (см.
, где ВС = 150 мм, BE = 36 мм плана механизма (см. ≈ 35 мм.
≈ 35 мм. = 198 мм, который на плане изображает вектор полного ускорения
= 198 мм, который на плане изображает вектор полного ускорения  = 208 мм, который на плане изображает вектор полного ускорения
= 208 мм, который на плане изображает вектор полного ускорения  (
( =
=  = 2·144 = 288 м/с2;
= 2·144 = 288 м/с2;  =
=  =
=  = 2·70 = 140 м/с2;
= 2·70 = 140 м/с2;  =
=  = 2·98 = 196 м/с2;
= 2·98 = 196 м/с2; =
=  = 2·198 = 396 м/с2;
= 2·198 = 396 м/с2;  =
=  = 2·208 = 416 м/с2;
= 2·208 = 416 м/с2; определяем следующим образом.
определяем следующим образом. ,
,  приложены к точкам S 2, S 3 (центрам масс шатуна 2 и ползуна 3 соответственно) и направлены вертикально вниз. Вектор силы полезного сопротивления
приложены к точкам S 2, S 3 (центрам масс шатуна 2 и ползуна 3 соответственно) и направлены вертикально вниз. Вектор силы полезного сопротивления  приложен к точке C и направ-лен противоположно вектору скорости
приложен к точке C и направ-лен противоположно вектору скорости  .
. = 0;
= 0;  = 0.
= 0. = m2 ·
= m2 ·  ;
;  = IS2 · ε2.
= IS2 · ε2. = m 3 ·
= m 3 ·  .
.  ,
,  к ускорению свободного падения g:
к ускорению свободного падения g: =
=  = 9,7 кг; m 3 =
= 9,7 кг; m 3 =  =
=  =6,1 кг,
=6,1 кг, =
=  = 4,694 кг·м2,
= 4,694 кг·м2,  приложен к точке S 2 и направлен противо-положно вектору ускорения
приложен к точке S 2 и направлен противо-положно вектору ускорения  . Вектор силы инерции
. Вектор силы инерции  приложен к точке С и направлен противоположно вектору ускорения
приложен к точке С и направлен противоположно вектору ускорения  направлен противоположно угловому ускорению
направлен противоположно угловому ускорению  . Действие ползуна 3 на горизонтальную стойку 0 в кинематической паре D заменяем силой реакции
. Действие ползуна 3 на горизонтальную стойку 0 в кинематической паре D заменяем силой реакции  .
.  .
.
 будет параллельна шатуну 2, а линия действия тангенциальной составляющей силы реакции
будет параллельна шатуну 2, а линия действия тангенциальной составляющей силы реакции  перпендикулярна шатуну 2 соответственно. Линия действия силы реакции
перпендикулярна шатуну 2 соответственно. Линия действия силы реакции  ,
, 

 ), при этом значения
), при этом значения  =
=  =
=  =
=  =
=  ≈ 47 мм.
≈ 47 мм. приложим к точке S 2 противоположно силе инерции
приложим к точке S 2 противоположно силе инерции  приложим на расстоянии
приложим на расстоянии  от линии действия сил инерции
от линии действия сил инерции 


