Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Каскадная система управления ⇐ ПредыдущаяСтр 6 из 6
Каскадные системы применяют для автоматизации объектов, обладающих большой инерционностью по каналу регулирования, если можно выбрать менее инерционную по отношению к наиболее опасным возмущениям промежуточного координату и использовать для нее, то же регулирующее воздействие, что и для основного выхода объекта.
     
Рис.38. Структурная схема каскадной АСР В этом случае в систему регулирования (рис.34.) включают два регулятора – основной (внешний) регулятор, служащий для стабилизации основного выхода объекта Расчет каскадной АСР предполагает определение настроек основного и вспомогательного регуляторов при заданных динамических характеристиках объекта по основному и вспомогательному каналам. Поскольку настройки основного и вспомогательного регуляторов взаимозависимы, расчет их проводят методом итераций. На каждом шаге итерации рассчитывают приведенную одноконтурную АСР, в которой один из регуляторов условно относится к эквивалентному объекту. Эквивалентный объект для основного регулятора представляет собой последовательное соединение замкнутого вспомогательного контура и основного канала регулирования; передаточная его равна:
Эквивалентный объект для вспомогательного регулятора является параллельным соединением вспомогательного канала и основной разомкнутой системы. Его передаточная функция имеет вид:
В зависимости от первого шага итерации различают два метода расчетра каскадных АСР. 1-й метод. Расчет начинают с основного регулятора. Метод используют в тех случаях, когда инерционность вспомогательного канала намного меньше, чем основного. На первом шаге принимают допущение о том, что рабочая частота основного контура намного меньше, чем вспомогательного. Тогда:
Таким образом, в первом приближении настройки основного регулятора не зависят от настроек вспомогательного регулятора и находятся по
На втором шаге рассчитывают настройки вспомогательного регулятора для эквивалентного объекта В случае приближенных расчетов ограничиваются первыми двумя шагами. При точных расчетах их продолжают до тех пор, пока настройки регуляторов, найденные в двух последовательных итерациях, не совпадут с заданной точностью. 2-й метод. Расчет начинают со вспомогательного регулятора. На первом шаге предполагают, что внешний регулятор отключен, т. е.:
Таким образом в первом приближении настройки вспомогательного регулятора находят по одноконтурной системе регулирования для вспомогательного канала регулирования. На втором шаге рассчитывают настройки основного регулятора по передаточной функции эквивалентного объекта Проведем моделирование в Matlab: 1) Ступенчатое воздействие по каналу управления.
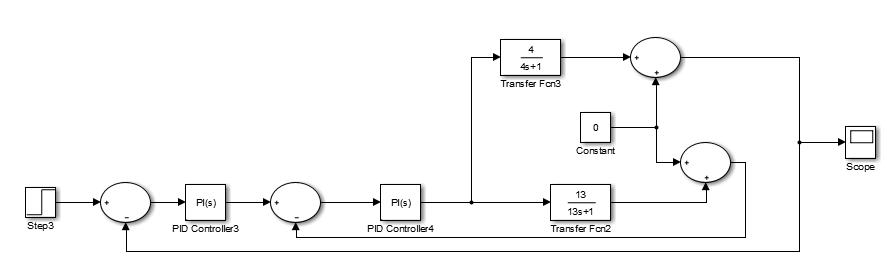
Рис.39.Схема регулирования каскадной системы управления ступенчатого воздействия по каналу управления.
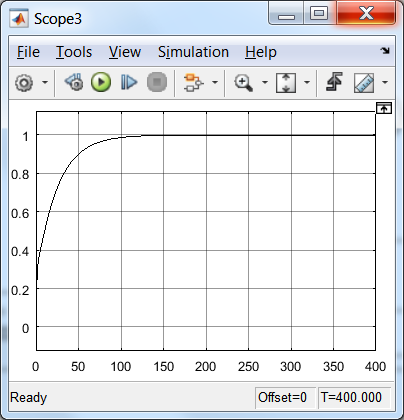
Рис.40.Реакция системы по каналу управления на ступенчатую функцию. Вывод: Система ковариантна к заданию, выполняется критерий качества в виде вида переходного процесса. Не выполняется критерий качества в виде времени регулирования. Выполняется критерий качества в виде динамической ошибки (монотонный процесс). Заключение: В первом разделе курсовой работы были рассмотрены методы идентификации и аппроксимации. Произведено сравнение результатов, полученных по данным методам. Критерием сравнения было среднеквадратичное отклонение (СКО). И было установлено, что наименьшее отклонение, а следовательно наибольшее приближение получилось у функции, рассчитанной аппроксимацией. В дальнейших расчетах использовались данные этого метода.
Исходя из данных расчета, был выбран закон регулирования (ПИ-закон регулирования). Рассчитали параметры настройки регулятора двумя методами: инженерным методам и Циглера-Никольса. Провели расчёты степеней затухания переходных процессов. После расчёта средних значений степеней затухания можно сделать вывод о том, что параметры регулятора, рассчитанные по методу Циглера-Никольса, лучше подходят нашему объекту. Завершением курсовой работы было проведение синтеза систем управления многомерным объектом. Мы рассмотрели три системы: систему несвязанного управления, комбинированную систему и каскадную систему управления. Для этих систем были рассчитаны компенсаторы возмущений и ПИ-регуляторы. Для расчета параметров ПИ-регуляторов был применен метод стандартных биномиальных форм Ньютона. Получены реакции систем на типовые входные воздействия. В среднем полученное время регулирования не превышает заданное.
Список использованной литературы 1.Теория автоматического управления. Часть1. Линейные системы автоматического управления: учеб.пособие/ Иван. гос. хим.-технол. академ.; А.А. Головушкин, Б.А. Головушкин. Иваново, 1993.-80 с. 2.Теория автоматического управления. Часть 2. Специальные системы автоматического управления: учеб.пособие/ Иван. гос. хим.-технол. академ.; А.А. Головушкин, А.Н. Лабутин, Б.А. Головушкин. Иваново, 1995.-88 с. 3.Ротач В.Я. Теория автоматического управления [Электронный ресурс]/В.Я.Ротач-Режим доступа http:/www.booksgid.com. 4. Кирьянов Д.В. Mathcad 13. СПб.: БХВ,- Петербург 2006 г. 5. А.Данилов. Компьютерный практикум по курсу "Теория управления". Simulink-моделирование в среде Matlab. МГУИЭ. 2002. 6. Дьяконов В. П. MATLAB. Полный самоучитель. – М.: ДМК Пресс, 2012. – 768 с.: ил.
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 167; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.130.31 (0.008 с.) |




 , и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты
, и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты  . Заданием для вспомогательного регулятора служит выходной сигнал основного регулятора.
. Заданием для вспомогательного регулятора служит выходной сигнал основного регулятора.


 .
.
 с учетом настроек вспомогательного регулятора. Для уточнения настроек вспомогательного регулятора расчет проводят по передаточной функции, в которую подставляют найденные настройки основного регулятора. Расчеты проводят до тех пор, пока настройки вспомогательного регулятора, найденные в двух последовательных итерациях, не совпадут с заданной точностью.
с учетом настроек вспомогательного регулятора. Для уточнения настроек вспомогательного регулятора расчет проводят по передаточной функции, в которую подставляют найденные настройки основного регулятора. Расчеты проводят до тех пор, пока настройки вспомогательного регулятора, найденные в двух последовательных итерациях, не совпадут с заданной точностью.