
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Теория автоматического управленияСтр 1 из 7Следующая ⇒
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Практикум по выполнению контрольных работ для курсантов специальностей 26.05.07 Эксплуатация судового электрооборудования и средств автоматики и 13.03.02 Электроэнергетика и электротехника очной и заочной форм обучения
Керчь, 2019 г.
Содержание
Введение. 4 1 Методы анализа линейных САУ.. 5 1.1 Рекомендации по изучению теоретических вопросов курса. 5 1.2 пример решения. 8 1.3 Задание для контрольной работы.. 15 2 Структурные схемы САУ и их преобразования.. 18 2.1 Рекомендации по изучению теоретических вопросов курса. 18 2.2 пример решения. 20 2.3 Задание для контрольной работы.. 21 3 Показатели качества линейных САУ.. 31 3.1 Рекомендации по изучению теоретических вопросов курса. 31 3.2 Пример решения. 34 3.3 Задание для контрольной работы.. 37 4 Расчет переходного процесса в импульсной САУ и синтез регулятора по заданному переходному процессу.. 41 4.1 Рекомендации по изучению теоретических вопросов курса. 41 4.2 пример решения. 43 4.3 Задание для контрольной работы.. 45 5 Расчёт и построение переходного процесса на фазовой плоскости.. 51 5.1 Рекомендации по изучению теоретических вопросов курса. 51 5.2 пример решения. 54 5.3 Задание для контрольной работы.. 59 6 Расчеты оптимальных САУ вариационным методом и с использование принципа максимума Понтрягина.. 66 6.1 Рекомендации по изучению теоретических вопросов курса. 66 6.2 Пример решения. 68 6.3 Задание для контрольной работы.. 72 Приложение А.. 76 Таблица основных преобразований Лапласа и z-преобразований. 76 СПИСОК рекомендованной ЛИТЕРАТУРЫ.. 77
Введение
Эффективность эксплуатации современного транспортного судна в значительной мере зависит от качества применяемых систем управления и автоматизации. Автоматизация судов — это процесс, при котором функции управления судном и его оборудованием, ранее выполнявшиеся человеком, передаются приборам и техническим устройствам; она обеспечивает надежность и экономичность работы оборудования, увеличивается производительность и улучшаются условия труда плавсостава, сокращается его численность, увеличивает безопасность рейсов. С автоматизированными комплексами работают все категории судовых специалистов, в том числе и инженеры-механики.
Теория автоматического управления (ТАУ) — это дисциплина, изучающая процессы автоматического управления объектами разной физической природы. Данный курс предназначен для курсантов, обучающихся по специальности Эксплуатация судового электрооборудования и средств автоматики для которых ТАУ является профилирующим предметом. Обслуживание систем автоматики возложено на судовых электромехаников, при выполнении своей работы они активно используют полученные знания. Цель курса состоит в изучении дифференциальных уравнений, описывающих переходные процессы, основных элементов и характеристик САУ, структурных схем САУ и их преобразованию, методов анализа САУ на устойчивость и качество управления. Учебным планом предусмотрено выполнение двух контрольных работ в 5-м и 6-м семестрах для очной формы обучения и 6,7 семестрах для заочной формы обучения. Каждая контрольная работа состоит из трех заданий. При выполнении контрольной работы № 1 курсанты анализируют линейные САУ, преобразовывают структурные схемы САУ и определяют их устойчивость, а при выполнении контрольной работы № 2 производятся расчеты импульсных и адаптивных САУ. Вариант задания определяется остатком от деления номера зачетной книжки на число 40. После выполнения всех пунктов указаний по каждому из заданий, курсант защищает свою работу преподавателю (защита проводится после проверки работы преподавателем). Контрольная работа должна быть оформлена в соответствии с требованиями университета и содержать титульный лист, содержание, основную часть и список используемой литературы
Методы анализа линейных САУ
Рекомендации по изучению теоретических вопросов курса
Поскольку подавляющее большинство объектов управления являются нелинейными системами, то в целях упрощения нелинейные уравнения заменяют линейными, и поэтому одной из задач теории линейных систем является задача линеаризации исходных нелинейных уравнений объекта управления. Линеаризация – это операция замены нелинейного дифференциального уравнения (ДУ) приближённым линейным. Получаемая при этом точность уравнений оказывается достаточной для технических задач.
Пусть имеется следующее дифференциальное уравнение, записанное в форме:
Разложив нелинейную функцию F в ряд Тейлора в окрестности точки номинального режима, и отбросив члены ряда выше первого порядка малости, получим следующее линейное дифференциальное уравнение для приращения переменных:
Проведенная линеаризация имеет простую графическую интерпретацию: она соответствует замене действительной нелинейной характеристики касательной к ней в точке, соответствующей установившемуся режиму. Следовательно, процедура линеаризации нелинейных систем дает возможность описать их линейными дифференциальными уравнениями в отклонениях. Поскольку такая линеаризация основана на разложении в ряд Тейлора, она применима только к непрерывно дифференцируемым нелинейностям. Одним из способов описания дифференциальных уравнений является передаточная функция. Передаточная функция
Для оценки динамических свойств системы и отдельных звеньев принято исследовать их реакцию на типовые входные воздействия, которые наиболее полно отражают особенности реальных возмущений. Во-первых, это позволяет сравнивать отдельные элементы между собой с точки зрения их динамических свойств. Во-вторых, зная реакцию системы на типовые воздействия, можно судить о том, как она будет вести себя при сложных изменениях входной величины. Наиболее распространенными типовыми воздействиями являются следующие воздействия: - Единичная ступенчатая функция (функция Хэвисайда)– 1 (t), заданная условиями (рисунок 1.1,а):
Данное воздействие для автоматических систем является распространенным видом входного воздействия. Как правило, подобные воздействия сопровождают процессы включения систем и вызывают переходы от одного установившегося состояния к другому. Реакцию системы на единичное ступенчатое воздействие называют переходной функцией h (t).
Изображение переходного процесса имеет следующий вид:
- Дельта-функция (функция Дирака) – δ (t), заданная условиями:
т.е. это импульс с бесконечной амплитудой, площадь которого принимается равной 1 (рисунок 1.1, б). Для автоматических систем является менее распространенным видом входного воздействия, чем единичная ступенчатая функция. Однако для теоретического описания последних имеет существенное значение. Подобные воздействия подобны удару в механических системах и короткому замыканию в электрических системах. Реакцией системы на импульсное типовое воздействие называется функцией веса. Изображение переходного процесса имеет следующий вид:
- Гармоническое типовое воздействие – это синусоидальный сигнал (рисунок 1.1, в). Если на вход линейной системы воздействует гармонический сигнал с амплитудой Xm и фазой x, то на выходе будет сигнал той же частоты, однако другой амплитуды Ym и фазы y. Реакция на гармонический сигнал - частотные характеристики. Изменения амплитуды Ym и фазы y выходного сигнала y (t) зависят от частоты входного сигнала x (t). Эти зависимости определяют следующие частотные характеристики: АЧХ (амплитудно-частотную) и ФЧХ (фазо-частотную):
АЧХ: ФЧХ: Частотные характеристики линейных САУ рассчитываются через передаточные функции: если W (s) – передаточная функция, то W (j) – частотная характеристика (ЧХ), получаемая из передаточной функции путём замены в ней s на j ЧХ как комплексное число может быть представлено в показательной и алгебраической формах. - Показательная форма:
Эта запись позволяет найти АЧХ и ФЧХ: - алгебраическая форма:
Данное выражение позволяет найти Если W (jω) изобразить вектором на комплексной плоскости, то при изменении ω от 0 до +∞ его конец будет вычерчивать кривую, называемую годографом вектора W (jω), или амплитудно-фазовую частотную характеристику (АФЧХ).
Рисунок 1.2 - Амплитудно - фазовая частотная характеристика
Между величинами A, (ω), S (ω)и Q существуют следующие зависимости:
Замечание к расчету значений ФЧХ. В расчётах на калькуляторе, компьютере или по таблицам тригонометрических функций определяется только главные значения арктангенса, которые находятся в пределах от -90° до +90°. Действительное значение угла определяется с учётом структуры выражения, находящегося под знаком arctg, которое является отношением мнимой Q к действительной P части соответствующего комплексного числа. Если P>0, то угол лежит в 1-м или 4-м квадрантах, если S<0, то угол лежит во 2-м или 3-м квадрантах. При S=0 угол равен 90°. Расчет ФЧХ нужно производить по следующей формуле:
где
П ример решения
Задание Для данного дифференциального уравнения:
при следующих начальных условиях:
выполнить следующие действия: а) линеаризовать уравнение; б) преобразовать уравнение по Лапласу, найти передаточную функцию;
в) рассчитать переходный процесс, функцию веса и построить их графики; г) рассчитать и построить графики АЧХ, ФЧХ и годограф ЧХ; д) рассчитать и построить ЛАЧХ. Решение а) линеаризация уравнения. Перенеся все члены уравнения влево, получим:
Находим частные производные:
Подставив в уравнение (1.2) полученные значения, можно записать линеаризованное дифференциальное уравнение:
Далее в расчетах линейных САУ будем использовать только линейные ДУ и потому знак D будем опускать:
б) преобразование уравнение по Лапласу, нахождение передаточной функции. Найдем изображения по Лапласу:
Тогда передаточная функция будет иметь вид:
в) расчёт переходного процесса, функции веса и построение их графиков. 1) корни характеристического уравнения комплексные Найдем изображение переходного процесса:
В связи с тем, что для данного выражение h (s) невозможно найти оригинал, поэтому представим выражение h (s) в виде суммы простейших дробей, оригиналы которых можно найти. Решаем относительно p характеристическое уравнение:
Полученные корни являются комплексными. Выделяем полный квадрат в знаменателе, а затем раскладываем выражение h (s) на сумму табличных выражений:
Чтобы определить коэффициенты A, B и C, необходимо приравнять коэффициенты при одинаковых степенях s.
Подставляя полученные значения коэффициентов A, B и C в h (s):
Используя таблицу преобразований Лапласа (см. приложение А), получим:
Или функцию переходного процесса можно записать в следующем виде:
Следующим шагом является представления выражение h (s) к стандартному виду, так, чтобы свободный член был равен 1, но т.к. постоянная составляющая переходного процесса равна 1, то пропускаем данное преобразование. Сумму в скобке можно представить в виде одной функции:
Окончательно, функция переходного процесса будет иметь вид:
Тогда функция веса:
На бесконечности значение h (t)стремится к установившемуся значению h уст =1, так как экспонента в выражении h (t)обращаются в нуль. Переходный процесс считается завершенным, когда его график h (t) попадает в 5%-зону установившегося значения, и далее не выходит из нее. Установившееся значение переходного процесса равно 1. Так как функция sin по модулю не превосходит 1, то время переходного процесса будет меньше или рано, чем время затухания экспоненты. Время t пп1, в течение которого затухает экспонента, находится из уравнения:
Точное значение t пп можно найти только из графика переходного процесса. Для аналитического его определения потребовалось бы решить трансцендентное уравнение, что невозможно. В связи с развитием вычислительной техники исчезла актуальность шага вычисления, поэтому построения графиков существенно облегчится, если применить математический пакет, например, Mathcad. Графики переходного процесса и функции веса представлены на рисунке 1.3. Рисунок 1.3 - Графики переходного процесса h (t) и функции веса k (t)
2) корни характеристического уравнения комплексные
Если корни характеристического уравнения действительные, то нахождения функции переходного процесса и веса будет отличаться от вышеприведенного. Имеется передаточная функция следующего вида:
Решаем характеристическое уравнение
относительно s, находим следующие действительные корни:
Следовательно, характеристический многочлен можно разложить на множители следующим способом:
Представляем выражение h (s) в виде суммы простейших дробей:
Найдем коэффициенты при степенях s:
Окончательно получаем разложение h (s) на табличные выражения:
Перейдя от изображений к оригиналам, получим:
и для функции веса:
Приводим выражение h (t) к стандартному виду, так что бы свободный член был равен 1:
На бесконечности значение h (t)стремится к установившемуся значению h уст =3, так как обе экспоненты в выражении обращаются в нуль. Находим время переходного процесса для каждой из экспонент.
Время t пп всего переходного процесса не равно ни t пп1, ни t пп2, но меньше большего из этих двух значений. Графики h (t) и k (t) приведены на рисунке 1.4
3) Расчет и построение графики АЧХ, ФЧХ и годографа ЧХ. Для передаточной функции, имеющей вид:
Найдем частотную характеристику:
Зная показательную форму частотной характеристики, найдем АЧХ и ФЧХ:
ВЧХ и МЧХ вычисляется домножением числителя и знаменателя ЧХ на комплексно-сопряженное к знаменателю число:
АЧХ и ФЧХ представлены на рисунке 1.5. Рисунок 1.5 - АЧХ и ФЧХ
Годограф ЧХ представлен на рисунке 1.6. Рисунок 1.6 - Годограф ЧХ д) рассчитать и построить график ЛАЧХ. Приводим передаточную функцию к нормальной форме:
Рассчитываем частоты сопряжения и логарифм от них:
Подготавливаем плоскость V – L к построению ЛАЧХ, для чего отмечаем на ней вертикальными пунктирными линиями значения V 1, V 2 (рисунок 1.7). Составляем выражение передаточной функции WI (p) для первого участка ЛАЧХ:
Через точку с координатами ω I = 0,1 и L I(ω I) = 0 проводим прямую линию с наклоном 0 (так как ν= 0) до частоты сопряжения ω2= 1. Все последующие отрезки ЛАЧХ строим по правилам: - так как частота сопряжения ω2=1, разделяющая I -й и II -й участки ЛАЧХ, порождена скобкой трехчленом знаменателя, то наклон линии II -го участка будет равен -2, что следует из вычислений 0-2=-2. - так как частота сопряжения ω1=2, разделяющая II -й и III -й участки ЛАЧХ, порождена скобкой двучленом числителя, то наклон линии III -го участка будет равен -1, что следует из вычислений -2+1=-1. Рисунок 1.7 - ЛАЧХ
Построения закончены.
Рекомендации по изучению теоретических вопросов курса
Структурная схема САУ - это изображение системы регулирования в виде совокупности динамических звеньев с указанием связей между ними. Структурная схема САУ в простейшем случае строится из элементарных динамических звеньев. Условные обозначения элементов структурной схемы представлены на рисунке 2.1. Рисунок 2.1 - Условные обозначения элементов структурной схемы: а - звено; б – линия передачи; в – узел; г - сумматоры
Элементы структурной схемы называются звеньями, и изображаются в виде прямоугольников, внутри которых записывается передаточная функция звена. Связь между звеньями изображается линиями связи со стрелками, указывающими направление передачи сигнала. Точка на линии связи, в которой происходит разветвление линии, называется узлом. Для сложения нескольких сигналов используется сумматор. Варианты изображения сумматора сигналов показаны на рисунке 2.1, г, причём в варианте с секторами затемняется сектор, в котором сигнал является вычитаемым:
Если на входах сумматора не изображены знаки, с которыми суммируются входные сигналы, то считается, что все сигнала положительны. Несколько элементарных звеньев могут быть заменены одним эквивалентным звеном. Для этого существуют правила эквивалентного преобразования структурных схем. Имеются три типа соединений динамических звеньев: - последовательное; - параллельное; - встречно-параллельное (соединение в виде обратной связи). Последовательным соединением звеньев называется такое соединение, при котором выходная величина предшествующего звена подается на вход последующего (рис. 2.1).
Параллельным соединением звеньев называется такое соединение, при котором на выход всех элементов поступает одно и то же воздействие, а их выходные величины алгебраически суммируются (рис. 2.1).
Рисунок 2.2 - Соединения динамических звеньев А) – последовательное, б)-параллельное, в) –отрицательная обратная связь, г) – положительная обратная связь
Встречно-параллельным (соединением с обратной связью) называется такое соединение динамических звеньев, при котором сигнал с выхода звена прямой цепи подается на его вход через звено обратной связи. Обратная связь может быть как положительной, так и отрицательной. Отсюда можно записать, что при встречно-параллельном соединении:
В выражениях передаточных функций замкнутой системы знак минус соответствует отрицательной обратной связи (рис.2.2), а знак плюс - положительной обратной связи (рис2.2). При более сложном соединении звеньев для получения передаточной функции системы по выбранному каналу пользуются правилами структурных преобразований. Имеется 4 вида структурных преобразований, позволяющих решить подавляющее число задач сворачивания структурной схемы: 1. Преобразования точек ветвления рисунок 2.3, а. 2. Преобразования точек слияния рисунок 2.3, б. 3. Переносы точки ветвления по цепи рисунок 2.3, в. 4. Переносы точки слияния по цепи звеньев рисунок 2.3, г.
Рисунок 2.3 - Преобразования структурных схем
П ример решения
Задание Свернуть данною структурною схему и найти WЭКВ. Решение Исходная схема (рисунок 2.4) не имеет типовых соединений звеньев.
Рисунок 2.5 – Преобразование структурной схемы САУ
Вариант №0 | ||||||||
| | | ||||||||
|
Вариант №1 | |||||||||
| | | ||||||||
|
Вариант №2 | |||||||||
| | | ||||||||
|
Вариант №3 | |||||||||
| | | ||||||||
|
Вариант №4 | |||||||||
| | | ||||||||
 (1.1)
(1.1) (1.2)
(1.2) – это отношение изображений выходного y (s) и входного x (s) сигналов при нулевых начальных условиях.
– это отношение изображений выходного y (s) и входного x (s) сигналов при нулевых начальных условиях. (1.3)
(1.3) (1.4)
(1.4) (1.5)
(1.5) (1.6)
(1.6) (1.7)
(1.7) - коэффициент передачи (усиления) звена на данной частоте;
- коэффициент передачи (усиления) звена на данной частоте; - сдвиг по фазе между выходным и входным сигналами.
- сдвиг по фазе между выходным и входным сигналами. (1.8)
(1.8) (1.9)
(1.9) – вещественно-частотная характеристика (ВЧХ) и
– вещественно-частотная характеристика (ВЧХ) и  – мнимо-частотная характеристика (МЧХ).
– мнимо-частотная характеристика (МЧХ). (1.10)
(1.10)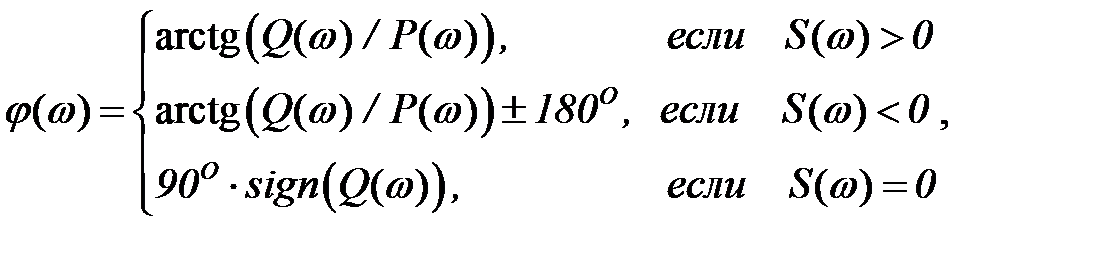 (1.11)
(1.11) - знак МЧХ.
- знак МЧХ.


































 где
где 



 (2.1)
(2.1) (2.2)
(2.2) (2.3)
(2.3) (2.4)
(2.4)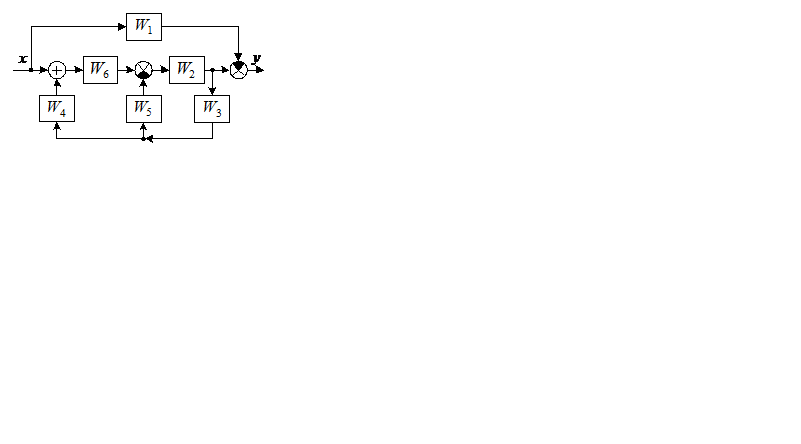
Продолжение таблицы 2.1
|
Вариант №5 | |
| | |
|
Вариант №6 | |
| | |
|
Вариант №7 | |
| | |
|
Вариант №8 | |
| | |
|
Вариант №9 | |
| | |
Продолжение таблицы 2.1
|
Вариант №10 | |
| | |
|
Вариант №11 | |
| | |
|
Вариант №12 | |
| | |
|
Вариант №13 | |
| | |
|
Вариант №14 | |
| | |
Продолжение таблицы 2.1
|
Вариант №15 | |
| | |
|
Вариант №16 | |
| | |
|
Вариант №17 | |
| | |
|
Вариант №18 | |
| | |
|
Вариант №19 | |
| | |
Продолжение таблицы 2.1
|
Вариант №20 | |
| | |
|
Вариант №21 | |
| | |
|
Вариант №22 | |
| | |
|
Вариант №23 | |
| | |
|
Вариант №24 | |
| | |
Продолжение таблицы 2.1
|
Вариант №25 | |
| | |
|
Вариант №26 | |
| | |
|
Вариант №27 | |
| | |
|
Вариант №28 | |
| | |
|
Вариант №29 | |
| | |
Продолжение таблицы 2.1
|
Вариант №30 | |
| | |
|
Вариант №31 | |
| | |
|
Вариант №32 | |
| | |
|
Вариант №33 | |
| | |
|
Вариант №34 | |
| | |
Продолжение таблицы 2.1
|
Вариант №35 | |
| | |
|
Вариант №36 | |
| | |
|
Вариант №37 | |
| | |
|
Вариант №38 | |
| | |
|
Вариант №39 | |
| | |
Вопросы для самоконтроля
1. Какие соединения звеньев называются типовыми? Приведите их эквивалентные передаточные функции.
2. Поясните назначение структурных преобразований схем САУ. Поясните структурные преобразования над точками ветвления.
3. Поясните назначение структурных преобразований схем САУ. Поясните структурные преобразования над точками слияния.
Рекомендуемая литература: [1], [3], [4].
Рекомендации по изучению теоретических вопросов курса
Устойчивость — свойство САУ возвращаться в заданный или близкий к нему установившийся режим после снятия возмущения.
В устойчивой САУ переходные процессы являются затухающими, в то время как неустойчивая система непрерывно удаляется от равновесного состояния или совершает вокруг него колебания с возрастающей амплитудой.
Устойчивость является одним из необходимых условий, обеспечивающих нормальное функционирование автоматических систем. Поэтому чрезвычайно важно выяснить те условия, которые обеспечивают принципиальную работоспособность системы, ее устойчивость.
Свойство устойчивости может быть определено по графику переходного процесса либо по корням характеристического уравнения. Однако расчёт устойчивости в обоих случаях невозможно применить к САУ, в передаточной функции которой содержится хотя бы один буквенный коэффициент, так как не существует аналитических методов решения алгебраических уравнений выше 3-й степени. По этой же причине неприменима указанная оценка устойчивости на этапе синтеза САУ.
В ТАУ для оценки устойчивости применяются критерии устойчивости. Критериями устойчивости называются совокупность процедур, с помощью которых можно установить факт устойчивости САУ без нахождения корней характеристического уравнения.
Пример решения
1. Произведем оценку устойчивости по критерию Гурвица.
Даны передаточные функции объекта и Д-регулятора:


Эквивалентная передаточная функция будет иметь вид:


Окончательно замкнутая САУ имеет следующую передаточную функцию:
Составляем определитель Гурвица:
Далее вычисляем диагональные определители Гурвица:




