
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Момент силы относительно точки
1. Сила действует на тело и может: А) смещать его; Б) поворачивать вокруг точки
2. Пусть сила
3. Вращательный момент этой силы будет зависеть от расстояния h - от точки О до линии действия силы (и не зависеть от точки приложения силы – так как силу можно переносить по линии её действия)
4. Момент силы относительно точки (центра О) называется величина = сила × на кратчайшее расстояние: от точки О до линии действия силы с соответствующим знаком. 5. Правило знаков: А) знак «+» - момент (изгиб) силы, которая стремится повернуть тело вокруг точки О против хода часовой стрелки. Б) знак «-» - по ходу часовой стрелки. В) если линия действия силы проходит через точку, то момент силы относительно этой точки = нулю. 6. Плечо относительно центра О – перпендикуляр из точки О на линию действия силы
Пара сил 1. Пара сил - система двух сил, приложенных к телу в двух разных точках: - равных по модулю - параллельных - противоположно направленных 2. Плечо пары сил – кратчайшее расстояние между линиями действия сил пары.
Момент пары сил Момент пары сил - произведение модуля любой силы на плечо пары (модуль силы х плечо) Свойства пары сил
1. Сумма проекций на любую ось сил пары равна нулю
F2cosα – F1cosα = 0
2. Сумма моментов сил пары относительно любой точки плоскости равна моменту пары. momo( momo( momo( Следовательно, пару сил нельзя заменить равнодействующей.
Самостоятельная работа обучающегося по теме 1.3. (1 час – все) 1. Составить глоссарий основных понятий по теме «Пара сил» - арх, ‘эзс – 1 час 1. Решение задач на определение моментов сил относительно точки: авто – 1час
ТЕМА 1.4. ПЛОСКАЯ СИСТЕМА ПРОИЗВОЛЬНО РАСПОЛОЖЕННЫХ СИЛ – (4 час арх, 2час авто, эзс) Основные понятия 1. Плоская система сил – система сил, линии действия которых лежат в одной плоскости.
2. На плоскости могут быть приложены силы: А) произвольно расположенные; Б) пары сил; В) силы, сходящиеся в одной точке.
3. Плоская система произвольно расположенных сил – все силы или линии их действия не пересекаются в одной точке.
Приведение плоской системы сил к заданному центру
1.Пусть на твёрдое тело действует система сил 2. Приложим в точке О по 2 уравновешенные силы: А) одна сила равна и параллельна заданной: Б) другая сила равна заданной, но противоположно направлена
3. В итоге на тело действует: А) система сходящихся сил
Б) система пар сил с моментами
4. Систему сходящихся сил заменяем равнодействующей
Или в соответствии с тем, что
5. В соответствии со вторым свойством пары сил найдём алгебраическую сумму моментов всех пар
Мо = m1 + m2 + …+ mn
Лемма Пуансо 1. В результате произвольную плоскую системусил можно заменить: - одной силой, = геометрической сумме всех сил, приложенных в произвольно выбранном центре и - моментом, равным алгебраической сумме моментов присоединенных пар
2. Принятые определения: А) точка о – центр приведения Б) главный вектор – вектор R, равный геометрической сумме всех сил. Его значение не зависит от выбора центра приведения. В) главный момент – момент МО, равный алгебраической сумме моментов присоединённых пар. Его значение зависит от выбора центра приведения (величина плеча будет меняться). Частные случаи приведения 1.R0=0,M0≠0 – система эквивалентна паре сил с моментом, равным главному моменту системы, который в этом случае не зависит от выбора центра приведения;
2. R0≠0,M0=0 – система эквивалентна равнодействующей R. Главный вектор в данном случае – является равнодействующей.
3. R0≠0,M0≠0 – система эквивалентна равнодействующей R, приложенной в новом центре приведения, расположенном от прежнего на расстоянии d = Мо\R
4. R=0,M0=0 – плоская система сил находится в равновесии;
|
|||||
|
|
Последнее изменение этой страницы: 2021-04-13; просмотров: 90; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.252.238 (0.011 с.) |
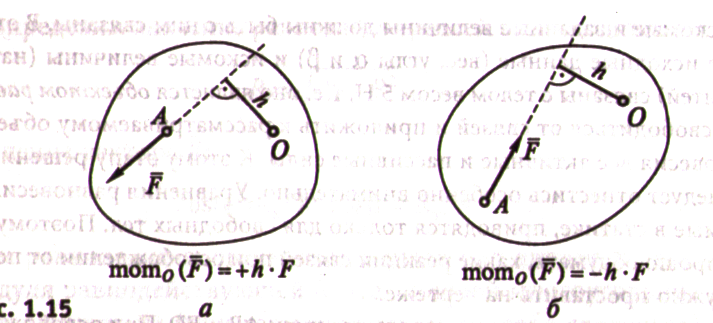
 , приложенная в точке А, стремится повернуть тело вокруг точки О
, приложенная в точке А, стремится повернуть тело вокруг точки О
 ) = - F1d = - Fd
) = - F1d = - Fd ) = + F2l = +Fl
) = + F2l = +Fl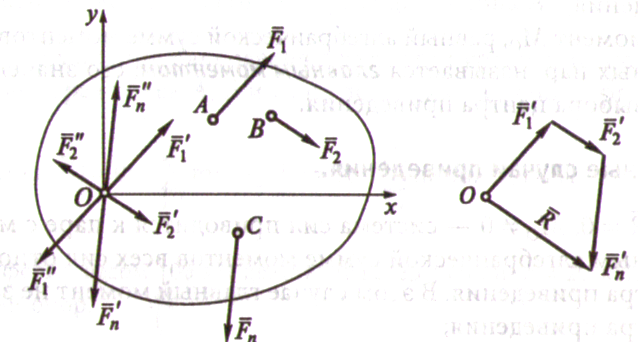





 и т.д.
и т.д.



