
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематический расчет рулевого привода
При проектировании рулевого управления обычно выполняют два расчета: кинематический и прочностной. Кинематический расчет заключается в определении углов поворота управляемых колес, выборе параметров рулевой трапеции, согласовании кинематики рулевого управления и подвески, а также нахождения передаточных чисел рулевого механизма, привода и управления в целом. Для того чтобы исключить боковое скольжение колес при движении автомобиля на повороте, траектории всех колес должны представлять собой дуги концентрических окружностей с общим центром О (мгновенный центр поворота). Для этого управляемые колеса должны быть повернуты на разные углы.
где Максимальный угол поворота наружного управляемого колеса Для определения геометрических параметров рулевой трапеции используют в большинстве случаев графические методы. Для этой цели предварительно задаются размерами поперечной тяги и боковых сторон трапеции, исходя из следующих соображений.
Считается, что оптимальное отношение длины m бокового рычага трапеции к длине n поперечной рулевой тяги составляет:
Численные значения m и n можно найти из подобия треугольников:
С учетом выражения (13.11) и Таким же образом можно найти приближенные значения параметров передней трапеции.
Если максимальная разница между теоретическим и фактическим значениями не превосходит 1,5° при максимальном угле поворота внутреннего колеса, то считается, что трапеция подобрана правильно. Подбор параметров рулевой трапеции с учетом увода управляемых колес представляет определенные трудности, так как продольное смещение мгновенного центра поворота зависит от скорости движения. Существует ряд аналитических способов определения оптимальных параметров рулевой трапеции, которые дают также приближенное значение искомых величин. Схематическую компоновку рулевого привода выполняют для определения размеров и расположения в пространстве сошки, тяг и рычагов, а также передаточного числа привода. При этом стремятся обеспечить одновременно симметричность крайних положений сошки относительно ее нейтрального положения, а также равенство передаточных чисел привода при повороте колес как вправо, так и влево. Если углы между сошкой и продольной тягой, а также между тягой и поворотным рычагом в его крайних положениях приблизительно одинаковы, то эти условия выполняются. Кинематически перемещения продольной тяги и подвески должны быть согласованы, чтобы исключить самопроизвольный поворот управляемых колес при деформации Компоновка, показанная на рисунке, не обеспечивает необходимого согласования траекторий переднего конца продольной тяги и центра колеса. Поэтому при вертикальных и угловых колебаниях автомобиля возникает самопроизвольный поворот управляемых колес.
|
||||||
|
|
Последнее изменение этой страницы: 2021-04-12; просмотров: 230; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.24.159 (0.007 с.) |
 Соотношение между углами поворота наружного
Соотношение между углами поворота наружного  и внутреннего
и внутреннего  управляемых колес, при котором обеспечивается их качение без скольжения, определяется из геометрических соотношений:
управляемых колес, при котором обеспечивается их качение без скольжения, определяется из геометрических соотношений: , (13.10)
, (13.10) – расстояние между осями шкворней (между осями поворотных цапф);
– расстояние между осями шкворней (между осями поворотных цапф);  – база автомобиля.
– база автомобиля. ограничивается по условиям компоновки автомобиля лонжероном рамы или продольной балкой основания несущего кузова. После подстановки
ограничивается по условиям компоновки автомобиля лонжероном рамы или продольной балкой основания несущего кузова. После подстановки  .
. В существующих конструкциях пересечение продолжения осей боковых тяг трапеции имеет место приблизительно на расстоянии 0,7
В существующих конструкциях пересечение продолжения осей боковых тяг трапеции имеет место приблизительно на расстоянии 0,7  = 0,12 ÷ 0,16. (13.11)
= 0,12 ÷ 0,16. (13.11)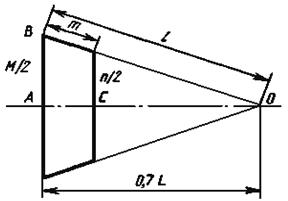
 ,
, 
 , получим уравнение с одним неизвестным, решение которого дает приближенные численные значения искомых величин.
, получим уравнение с одним неизвестным, решение которого дает приближенные численные значения искомых величин. По полученным данным выполняют в масштабе графическое построение рулевой трапеции. Затем, построив через равные угловые промежутки положение цапфы внутреннего колеса, графически находят соответствующие положения наружного колеса и строят график зависимости
По полученным данным выполняют в масштабе графическое построение рулевой трапеции. Затем, построив через равные угловые промежутки положение цапфы внутреннего колеса, графически находят соответствующие положения наружного колеса и строят график зависимости  , которую называют фактической (штриховая кривая). Далее по уравнению (13.10) строят теоретическую зависимость (сплошная кривая).
, которую называют фактической (штриховая кривая). Далее по уравнению (13.10) строят теоретическую зависимость (сплошная кривая). упругого элемента подвески.
упругого элемента подвески. Сравнительно хорошее согласование может быть получено при расположении рулевого механизма перед передней осью или при расположении рулевого механизма за передней осью и передним расположением серьги листовой рессоры. Однако при переднем расположении серьги продольные силы, возникающие при наезде передних колес на препятствие, в большей степени передаются на раму автомобиля.
Сравнительно хорошее согласование может быть получено при расположении рулевого механизма перед передней осью или при расположении рулевого механизма за передней осью и передним расположением серьги листовой рессоры. Однако при переднем расположении серьги продольные силы, возникающие при наезде передних колес на препятствие, в большей степени передаются на раму автомобиля.


