Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Введение в теорию качения колеса
Прежде чем приступить к изучению закономерностей движения автомобиля (колесной машины), необходимо познакомиться с работой его главного движущего и направляющего устройства – колеса. В зависимости от соотношения деформаций колеса и опорной поверхности различают четыре вида взаимодействия колеса с дорогой: 1) качение жесткого колеса по жесткой (практически недеформируемой) поверхности (рис. 1, а); 2) качение эластичного колеса по недеформируемой поверхности (рис. 1, б); 3) качение жесткого колеса по деформируемой (податливой) поверхности (рис. 1, в); 4) качение эластичного колеса по деформируемой поверхности (рис. 1, г). Первый из рассматриваемых случаев относится к варианту качения стального колеса трамвая или поезда по рельсовому пути и в теории автомобиля обычно не используется. Три остальных случая характеризуют взаимодействие колеса автомобиля с различными дорожными поверхностями. При этом наиболее типичным является второй случай, соответствующий движению колеса с эластичной шиной по дороге с твердым покрытием (асфальт, асфальтобетон, брусчатка). В реальной эксплуатации встречается также третий случай, когда автомобиль движется по свежевыпавшему снегу и деформации шины значительно меньше деформаций снежного покрытия, а также четвертый случай, когда автомобиль (колесный трактор) движется по податливым грунтовым дорогам. На рис. 2 показаны основные геометрические параметры автомобильного колеса и шины. Здесь D н – диаметр наибольшего окружного сечения беговой дорожки шины ненагруженного колеса; d – посадочный диаметр обода; В ш – ширина профиля шины; Н ш – высота профиля шины; Dш = Н ш / В ш – коэф- фициент высоты профиля шины. В маркировке автомобильной шины присутствуют все необходимые данные для определения перечисленных параметров (если Dш не показан, он обычно равен 82-86%). Например, маркировка 175/70–R13 свидетельствует о том, что посадочный диаметр d равен 13 дюймам, т.е. (25,4 мм) ·13 = 330 мм, ширина профиля шины В ш = 175 мм, коэффициент высоты профиля шины Dш = 70%, т.е. 0,7. Отсюда высота профиля шины Н ш = В ш Dш = 175 · 0,7 = 122,5 мм. Соответственно (см. рис. 2), D н = d + 2 Н ш, т.е. D н = 330 + 2 · 122,5 = 575 мм. Очень важным, с точки зрения теоретических расчетов, является правильный выбор радиуса качения автомобильного колеса. В теории качения эластичного колеса по твердой (недеформируемой) поверхности оперируют четырьмя основными радиусами.
Свободный радиус r c – радиус наибольшего окружного сечения беговой дорожки шины ненагруженного колеса (т.е. при отсутствии его контакта с поверхностью дороги). r c = 0,5 D н . (1) Статический радиус r ст – расстояние от центра неподвижного колеса, нагруженного вертикальной силой Fz, до опорной поверхности (см. рис. 3) r cт = 0,5 d + l z Н ш = 0,5 d + l z Dш В ш, (2) где l z – коэффициент вертикальной деформации шины; l z = 0,8-0,86 – для радиальных шин легковых автомобилей; l z = 0,85-0,91 – для шин грузовых автомобилей и автобусов, а также для диагональных шин легковых автомобилей. Коэффициент l z зависит от величины вертикальной нагрузки на шину и от давления воздуха в шине, при этом с увеличением нагрузки l z уменьшается, а с увеличением давления – увеличивается. Динамический радиус r д – расстояние от центра катящегося колеса до опорной поверхности (см. рис. 4). На величину r д, точно также, как на r cт ,влияют вертикальная нагрузка на колесо и давление воздуха в шине. Кроме того, динамический радиус несколько увеличивается с ростом угловой скорости wк вращения колеса и уменьшается с ростом передаваемого колесом крутящего момента Т к. Противоположное влияние wк и Т к на изменение r д обусловило то, что для дорог с твердым покрытием часто принимают r д@ r ст .
Радиус качения r к (кинематический радиус) – отношение продольной скорости колеса V х к его угловой скорости вращения wк r к= V х / wк. (3)
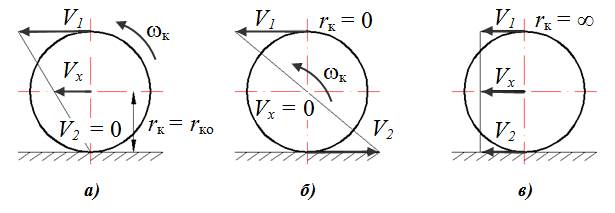
Радиус качения сильно зависит от величины и направления передаваемого колесом крутящего момента Т к и сцепных свойств шины с дорожным покрытием. Если Т к не превышает 60% значения, при котором наступает буксование колеса или его юз, то эту зависимость можно считать линейной. При этом в ведущем режиме зависимость имеет вид r к = r ко - lт Т к, (4) а в тормозном режиме (т.е. когда Т к меняет направление) r к = r ко + lт Т к, (5) где r ко – радиус качения колеса в ведомом режиме (когда Т к = 0); lт - коэффициент тангенциальной эластичности шины. Радиус качения колеса в ведомом режиме r ко определяется экспериментально путем прокатывания нагруженного заданной вертикальной нагрузкой F z колеса на 5-10 полных оборотов (п оборотов) и замера его пути качения S. Так как S = 2p r ко п, то r ко = S / 2p п. (6) Рассмотрим характерные случаи. 1. Ведомый режим. Т к = 0; r к= r ко; wк ¹ 0. Ситуацию иллюстрирует рис. 5 а. В этом случае V 1 = 2 V х; V 2 = 0. 2. Режим полного буксования (рис. 5 б). T к > Т кmax (максимальный момент колеса по сцеплению с дорогой); V 1 = - V 2; V х = 0. Тогда r к = V х / wк = 0. 3. Режим юза (рис. 5 в). Т к < - Т кmax; V 1 = V 2 = V х; wк = 0. Тогда r к = V х / wк = ¥.
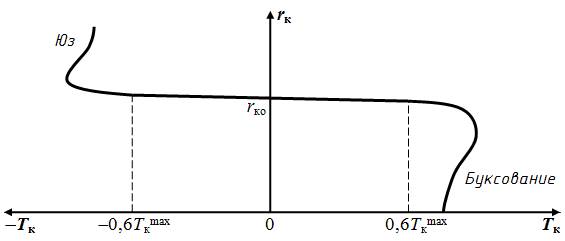
Рассмотренные случаи показывают, что диапазон возможных значений радиуса качения r к автомобильного колеса в реальных условиях изменяется от нуля до бесконечности, т.е. 0 £ r к£ ¥. Это хорошо иллюстрирует график зависимости r кот Т к (рис. 6). Видно, что в диапазоне значений Т к от 0,6 Т кmax до - 0,6 Т кmax происходит некоторое увеличение r к практически по линейному закону. Для большинства шин при работе в указанном диапазоне передаваемых колесом моментов r к = r д = 0,94 - 1,06 r ко. В зонах от 0,6 Т кmax до Т кmax и от -0,6 Т кmax до - Т кmax зависимость сложная нелинейная, при этом в первой зоне по мере увеличения передавае-мого колесом крутящего момента r к резко устремляется к нулю (полное буксование), а во второй зоне по мере возрастания тормозного (отрицательного) момента величина r к быстро уходит в бесконечность (режим чистого сколь-жения без вращения, т.е.
так называемый юз).
|
|||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 211; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.220.160.216 (0.013 с.) |